






 本文介绍在ArangoDB中使用最短路径算法查询两个顶点间最短关系路径的方法,通过具体示例展示了如何从多个可能的路径中找出长度最短的一条。
本文介绍在ArangoDB中使用最短路径算法查询两个顶点间最短关系路径的方法,通过具体示例展示了如何从多个可能的路径中找出长度最短的一条。
Arangodb最短路径算法只能确定一条最短路径。
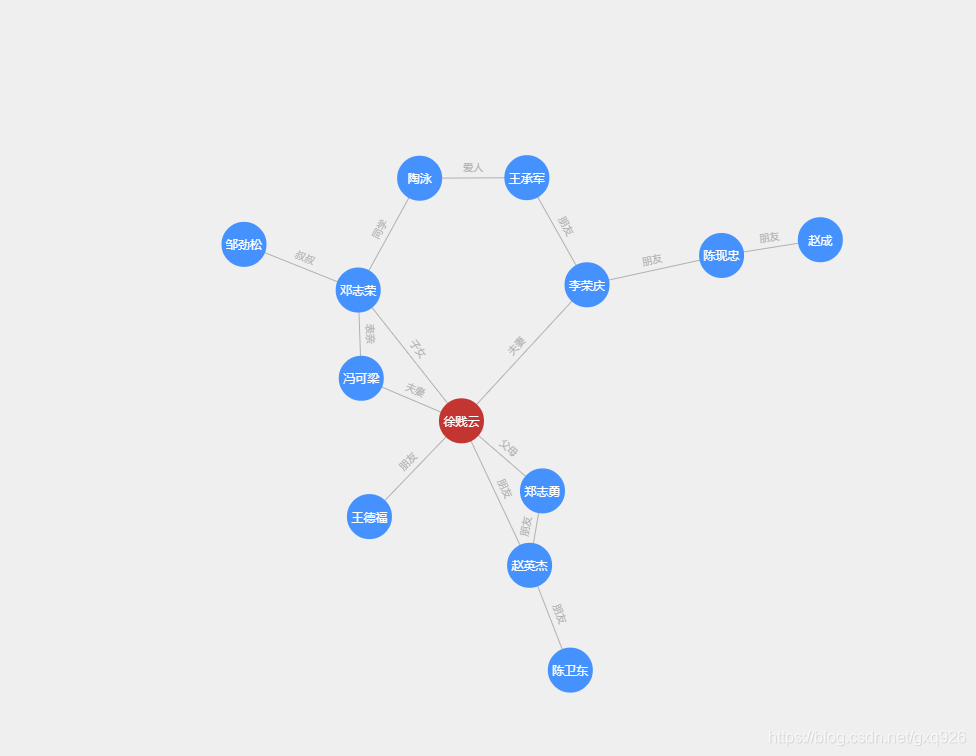
如图所示,我们从郑志勇到邓志荣的关系路径是:1、郑志勇–>徐贱云–>邓志荣 2、郑志勇–>徐贱云–>冯可梁–>邓志荣 3、郑志勇–>赵英杰–>徐贱云–>邓志荣 …
当然还有多条路径。我们可以从这些路径中可以看出除了第一条长度为3,其余的都大于3,而第一条就是我们要找的最短路径。
那么如果在arangodb如何来查询最短路径呢?假设我们有个people的vertex document即顶点文档,graph(图)为relation,然后查询如下:
FOR p IN OUTBOUND SHORTEST_PATH "people/郑志勇" TO "people/邓志荣" edges return p
这样就能查询出最短路径,结果就是:郑志勇–>徐建云–>邓志荣
总结
最短路径在关系图谱查询非常有用,可以去除不必要的关系找到最短的那条关系

















 754
754

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









