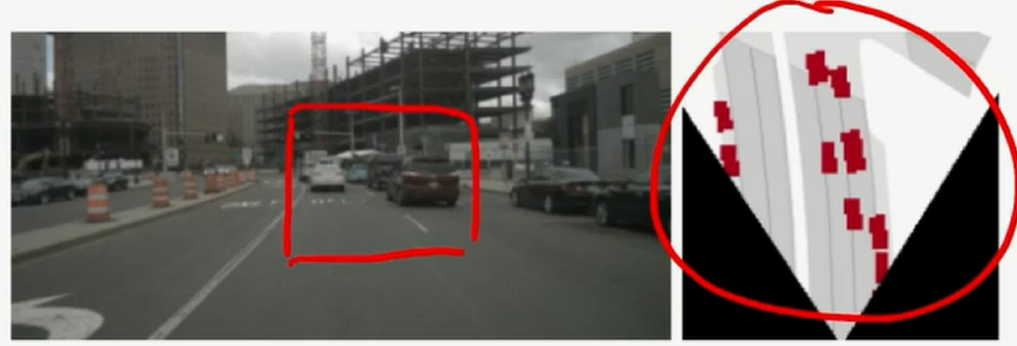
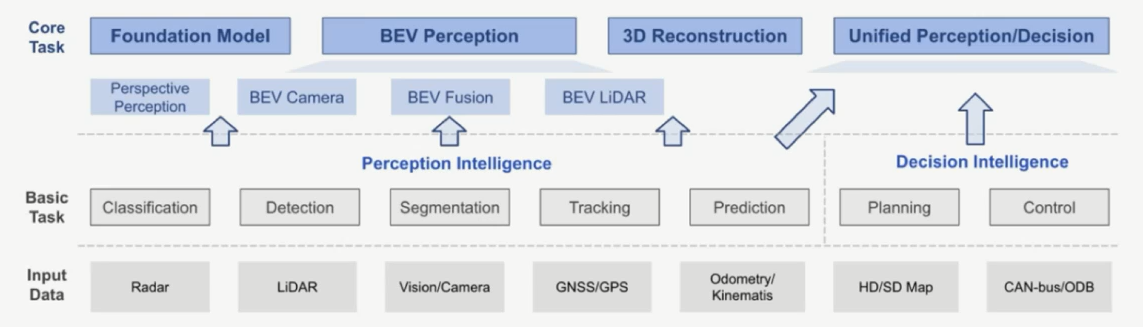
1-BEV感知算法介绍 1 什么是BEV感知算法?1.1 什么是BEV?1.2 什么是感知?1.3 什么是算法?1.4 什么是BEV感知? 1 什么是BEV感知算法? 1.1 什么是BEV? Bird’s-Eye-View,尺度变化小、遮挡小 1.2 什么是感知? 感知是一种响应模式,比如人脑对外界的响应。 利用感知模型,将多传感器输入统一到bev表征。 1.3 什么是算法? 算法是一种数学模型,帮助计算机理解不同输入,从而实现不同任务。 1.4 什么是BEV感知? BEV感知是一个建立在众多子任务上的一个概念。包括:分类、检测、分割等。 BEV感知输入包括:毫米波雷达、激光雷达点云、相机图像等。依据输入不同,BEV感知算法有进一步的划分。
 2175
1967
2223
2175
1967
2223

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









 本文介绍了BEV感知算法,包括其定义(鸟瞰视角,优点在于尺度稳定、遮挡少),以及它作为将多传感器数据融合并用于车辆自主驾驶中的关键组成部分,涉及的任务如分类、检测和分割。算法模型解释了如何通过数学方法让计算机处理这些输入,如毫米波雷达、激光雷达和相机数据。
本文介绍了BEV感知算法,包括其定义(鸟瞰视角,优点在于尺度稳定、遮挡少),以及它作为将多传感器数据融合并用于车辆自主驾驶中的关键组成部分,涉及的任务如分类、检测和分割。算法模型解释了如何通过数学方法让计算机处理这些输入,如毫米波雷达、激光雷达和相机数据。