



清迈大学速调管调制器脉冲形成网络的设计与低功率测试
摘要
一种用于速调管调制器的新型脉冲形成网络(PFN)已在清迈大学等离子体与束物理研究设施(PBP)完成设计和测试。该PFN由六个电容器和电感器部分组成。PFN的输出波形具有3.2 Ps的脉冲宽度,以及纹波小于-2.0 Ps的平坦顶部,且纹波小于± 2.0%。本文讨论了PFN的设计、仿真及低压测试结果。
1. 引言
基于linac-的太赫兹设施已在清迈大学等离子体与束物理研究设施(PBP)建立。飞秒级电子束可通过包含热阴极射频枪、作为磁压缩器的阿尔法磁铁以及作为后加速段的直线加速器(linac)的系统产生。这些短电子束可用于以相干过渡辐射的形式产生高强度太赫兹辐射。[1-3]。
为了加速电子束,该系统需要来自速调管的高功率射频来驱动射频枪和直线加速器。速调管需要来自调制器的低电平射频和高压脉冲以产生高功率射频。
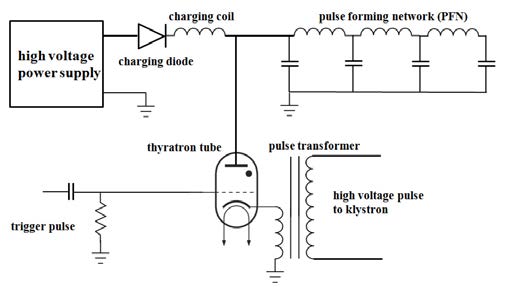
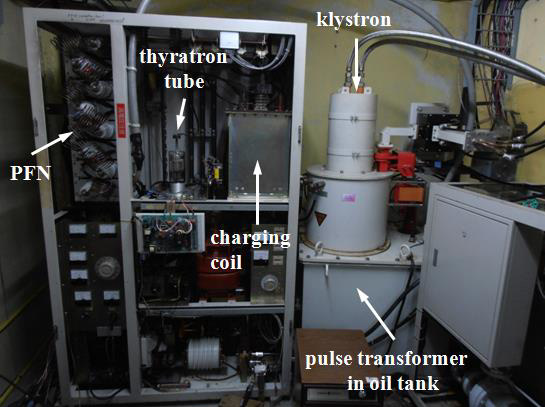
清迈大学的速调管调制器为线路型调制器,其主要部件包括充电系统、脉冲形成网络、脉冲变压器和闸流管开关,如图1(a)所示。对于射频枪,图1(b)所示的当前调制器是来自清迈玛哈拉吉医院用于癌症治疗的20兆伏三菱直线加速器的调制器。该脉冲形成网络设计用于通过8 P秒的8个LC节产生射频宏脉冲,电容器的标称电容为54纳法。
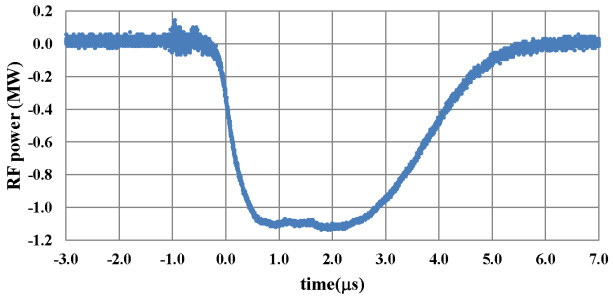
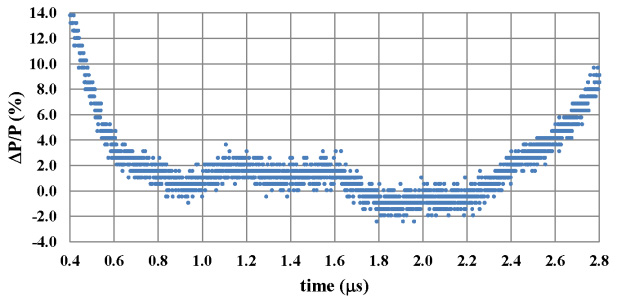
然而,PBP设施中的热阴极射频-枪由于存在反向轰击问题,要求射频脉冲宽度小于4 P秒。因此,该调制器的脉冲形成网络仅使用3个LC节以产生3.2 P秒的脉冲宽度,其脉冲纹波为± 3%,脉冲上升时间和下降时间分别为0.8 P秒和2.5 P秒。图2(a)和(b)显示了当前调制器的射频脉冲特性。为了获得更长的脉冲平顶、更小的脉冲纹波以及更短的脉冲上升和下降时间,脉冲形成网络需要更多数量的LC节,但电容器应具有更小的电容。本文将描述采用6个32纳法电容器的脉冲形成网络的设计与测试,以改善高压脉冲的脉冲平顶、脉冲纹波、脉冲上升时间和下降时间。这6个电容器也属于玛哈拉吉医院4兆伏三菱直线加速器调制器的脉冲形成网络的一部分。
 脉冲调制器示意图;(b) 清迈大学射频枪用脉冲调制器)
脉冲调制器示意图;(b) 清迈大学射频枪用脉冲调制器)
 RF-电子枪的入射射频功率和(b) 射频功率纹波。)
RF-电子枪的入射射频功率和(b) 射频功率纹波。)
2. 脉冲形成网络
脉冲形成网络是线路型调制器的主要部件,其设计简单,但由于LC节的有限数量,导致平顶上存在固有纹波。然而,通过采用更多数量的LC节可以减小平顶纹波[1]。来自脉冲形成网络并具有最佳脉冲纹波的高压脉冲是实现具有最佳脉冲纹波的高功率射频脉冲的组合之一。在 PBP,脉冲形成网络由级联低通LC滤波器组成如图3所示。这种类型的LC网络的脉冲宽度 $W$ 由[4]
$$
W = \sqrt{LC} \cdot s \tag{1}
$$
其中 $L$ 是电感 $[\mu H]$,$C$ 为电容 $[nF]$。特性阻抗 $Z [\Omega]$ 由[4]给出
$$
Z = \sqrt{\frac{L}{C}} \tag{2}
$$
由于当前PFN的特性阻抗为7.5 $\Omega$[5],对32 nF电容器的理论计算表明,电感为1.8 $\mu H$,脉冲宽度为2.4 Ps。由于有6个电容器可用,新设计将由6个LC节组成。仿真实现的高压脉冲特性,包括脉冲上升和下降时间、脉冲纹波和脉冲宽度,将在下一节中描述。
3. 仿真
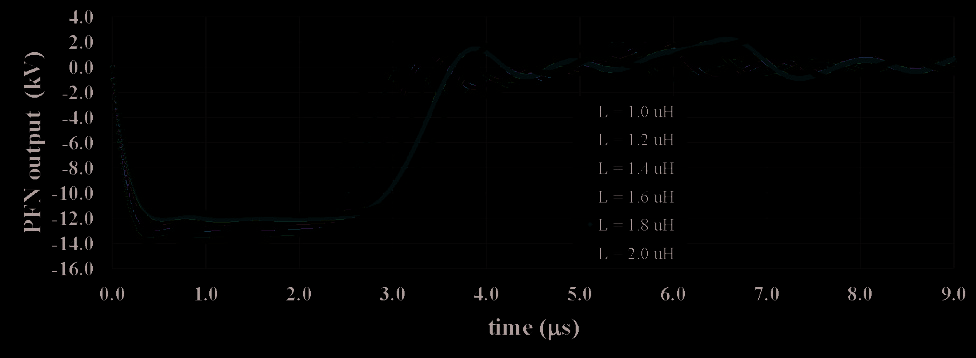
使用VINPFN 1.0[6]仿真代码进行了PFN的仿真。VINPFN 1.0是一款免费且简单的仿真程序。该程序要求使用相同的电容器和电感器。仿真中采用了6个LC节,充电电压为24 kV。图4(a)显示了负载电阻为7.5 $\Omega$时不同电感器的仿真结果。如果PFN阻抗与负载电阻匹配,则负载电阻上的电压脉冲为充电电压的一半。
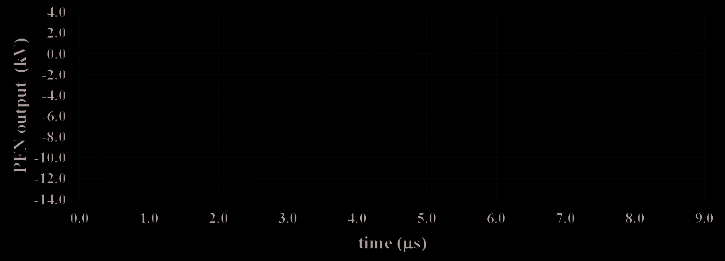
根据图4(a),低电感可产生更短的脉冲宽度,但PFN阻抗与负载电阻不匹配。仿真表明,对于32.0 nF的电容器,7.5 $\Omega$的PFN阻抗需要1.8 $\mu H$的电感器,此结果与理论计算相符。仿真结果显示,PFN波形的脉冲宽度为3.0 Ps,平顶纹波小于± 1.2%。脉冲上升时间和下降时间分别为0.4 Ps和0.9 Ps。高压脉冲的特性如图4(b)和(c)所示。
4. 低压测试
12匝螺线管绕制成直径8厘米、长度20厘米。每个螺线管均带有调谐片。根据计算和仿真结果,测量并调谐每个螺线管的电感至约1.8 $\mu H$。6个螺线管连接到6个标称值为32.0 nF、额定电压为40 kV的电容器,如图5所示。
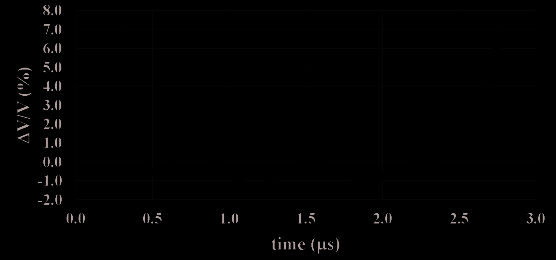
脉冲形成网络经过测试并系统调谐,以满足平顶纹波要求的最佳脉冲形状。该脉冲形成网络测试使用 IRF540作为开关,测试示意图如图6(a)所示。在充电电压从0到25伏的条件下获得了输出脉冲波形。由于脉冲形成网络是在电阻负载下进行测试的,因此平顶不随工作电压变化,如图6(b)所示。图7(a)显示了输出波形,其脉冲宽度为3.2 Ps,上升时间为0.3 Ps,下降时间为1.2 Ps。该脉冲具有2.0 Ps的平顶,纹波小于± 2%,如图7(b)所示。
 输出波形和 (b) 25伏特充电电压下的脉冲纹波。)
输出波形和 (b) 25伏特充电电压下的脉冲纹波。)
图8是在25V充电电压下,仿真与测量脉冲的对比。两种情况下的脉冲上升时间和平顶长度吻合良好,但测量结果的下降时间比实验长。由于电容器并不完全相同,需要调节电感器以获得最佳脉冲纹波。因此,最后一个电感器具有最高电感,并导致更长的拖尾,如图8所示。对于VINPFN程序中的B型脉冲形成网络,电容器无法像电感器一样单独调节,因此可以明显看出仿真与测量结果之间的差异。
5. 结论
已为清迈大学射频枪的速调管调制器设计并构建了脉冲形成网络射频枪。低压测试结果表明,该脉冲形成网络可产生3.2 Ps脉冲,上升时间为0.3 Ps,下降时间为1.2 Ps。脉冲平顶部分为2.0 Ps,纹波小于± 2%。未来工作将集中在高电压和高射频功率测试上。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









