







更多内容,请关注:
github:https://github.com/gotonote/Autopilot-Notes.git)
在自动驾驶和机器人的多传感器融合定位算法中,想要获得鲁棒的、连续的、精确的全局定位结果,通常会充分利用各个传感器和模型,比如 GNSS/IMU/轮速编码器/载体模型/camera/LiDAR/高精地图,这其中会涉及到两大类坐标系,一个是常见的全局坐标系,也可以叫做地理坐标系或导航坐标系,算法最终的定位结果、GNSS/高精地图的输入都与此相关,另一个是局部坐标系,用于表示载体自身或者其上各个传感器的位置和朝向,IMU/轮速编码器/载体模型/camera/LiDAR的输入数据都在各自的局部坐标下。
一、ECEF 坐标系
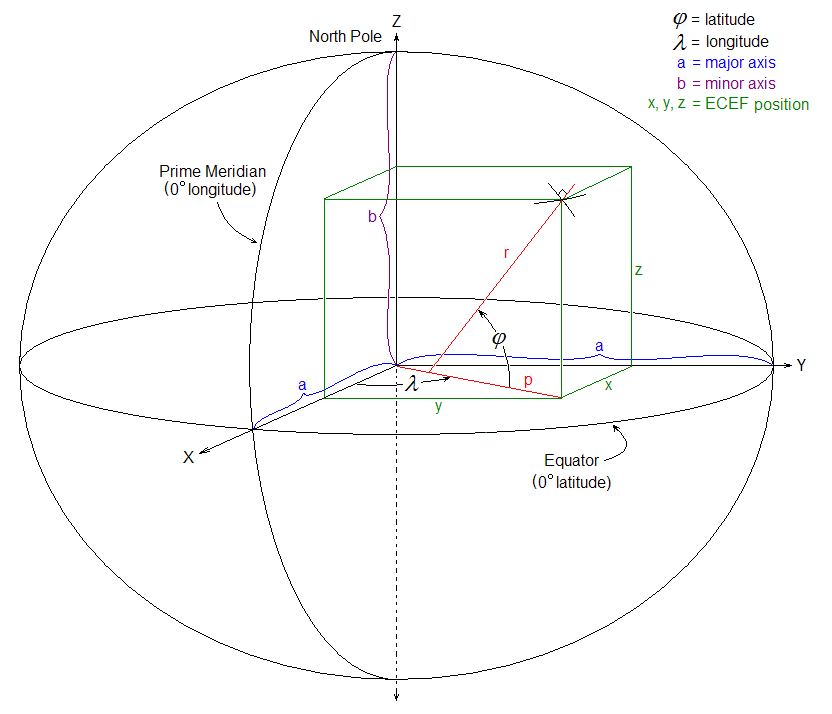
ECEF(Earth-Centered Earth-Fixed )地心地固坐标系,ECEF坐标系与地球固联,且随着地球转动。图中O即为坐标原点,位置在地球质心。X轴指向本初子午线(0度经度)和赤道(0deglatitude)的交点。Z轴通过原点指向北极。Y轴与X、Z轴构成右手坐标系。地球附近空间的点都可以在此坐标系下表示为 (x, y, z)。图中 (a, b) 分别为大地椭球的长轴和短轴,对于大地椭球不同的几何形状定义会导致不同的 ECEF 系,WGS84 就是最常见的一种 ECEF 系。
在 ECEF 坐标系下的点 ( x , y , z ) (x,y,z) (x,y,z) 也可以用经纬高 ( λ , ϕ , h ) (\lambda, \phi, h) (λ,ϕ,h) 来表示:
x = ( N + h ) c o s ϕ ⋅ c o s λ y = ( N + h ) c o s ϕ ⋅ s i n λ z = [ N ( 1 − e 2 ) + h ] s i n ϕ \begin{align} x &=(N+h)cos\phi \cdot cos\lambda \\ y &=(N+h)cosϕ \cdot sinλ \\ z &=[N(1−e^2)+h]sinϕ \\ \end{align} xyz=(N+h)cosϕ⋅cosλ=(N+h)cosϕ⋅sinλ=[N(1−e2)+h]sinϕ
- e:椭球偏心率, e 2 = a 2 − b 2 a 2 e^2= \frac{a^2-b^2}{a^2} e2=a2a2−b2 , a:长半径,b:短半径;
- N :基准椭球体卯酉圈曲率半径, N = a 1 − e 2 s i n 2 ϕ N= \frac{a}{\sqrt{ 1-e^2 sin^2\phi }} N=1−e2sin2ϕa ;
反过来已知 ECEF 值,也能求解经纬高,但由于 h 的计算式含有待求解的 φ ,所以我们只能借助迭代法来逼近求解 φ 和 h 的值,通常收敛得很快,经过 3~4 次迭代就可以结束计算。
λ = a r c t a n ( y x ) h = p c o s ϕ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6797
6797

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









