




什么是目标检测中的旋转敏感度错误?
本文讲述旋转框回归引起的旋转敏感度误差,以及如何解决该问题
旋转框的目标检测任务通常出现在遥感数据,文本数据,以及点云鸟瞰图数据中。对旋转框的表达会采用中心点和长宽再加上旋转角,然后设计损失函数求学习误差。本文对旋转框回归引起的旋转敏感度误差展开,并讨论如何解决该问题。
目录
-
前沿
-
核心思想
-
问题描述
-
解决方法
-
思考展望
前沿
目标检测任务根据方向,通常可分为水平框检测和旋转框检测。水平框检测通常适合于一般的自然场景图像。旋转框检测通常出现在场景文本、遥感地图、车牌检测、点云鸟瞰图中,通常需要更精确的定位,并需要有效的旋转检测器。
目标检测中如何表示一个旋转框?
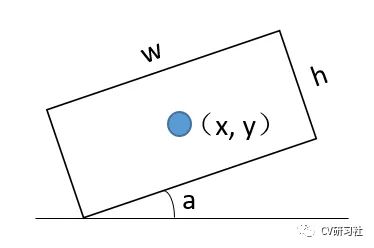
通常对一个旋转框我们有两种表达形式:一种是基于五个参数,分别为中心点(x, y)、宽高(w, h)、旋转角度a,如下图所示:
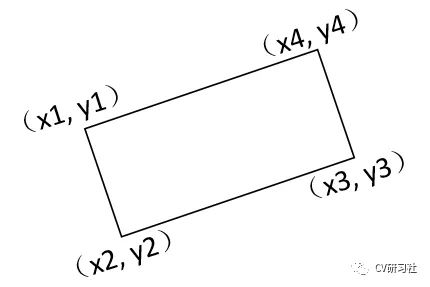
另一种是基于八个参数,分别是旋转框的四个顶点(x1, y1),(x2, y2),(x3, y3),(x4, y4),如下图所示:
对于基于区域的旋转物体检测器,通常使用“l1-损失”作为损失函数。
核心思想
本文认为由于角度固有的周期性以及相关的宽度和高度的突然变化导致的损失
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1046
1046

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











