



01 学习人群
一般来说,学习WebGIS开发的人员有两类。
-
其中较为庞大的群体是3S(GIS、RS、GNSS)及相关专业的学生;
-
另一类是计算机专业的学生
2024年陆续也有一些其他专业的人士也对进入WebGIS开发行业感兴趣,这里不多赘述。
这里重点讲述0基础的学生学习WebGIS的方法和路线。
通常,3S专业的学生在大学期间学习了多门相关课程,如:
-
C语言程序设计与开发
-
地理信息系统概论
-
GIS 设计与开发
-
面向对象设计与开发
-
网页设计与制作
-
人工智能与专家系统
-
遥感地学分析
-
空间数据库和关系数据库等
在此基础上,我们需要了解一些WebGIS开发的编程语言。
02 编程语言和基础
大家在学校所接触的编程语言也有多种,从C语言到C++、C#、Java等,相信大家都有所接触,其他专业的没接触过的也至少所有耳闻。
但是,这里要跟大家重点说明,毕竟编程语言的选择,非常重要!
虽然C语言是一种面向过程的语言,但在学习WebGIS时,我们主要需要理解面向对象的概念,其次也需要了解函数、类等概念。
一般来说,GIS专业的本科生,通过大学课程的学习,已经掌握了一些 GIS 的理论知识,如:地理信息系统的组成、地理空间数据获取、地理空间数据表达、地理空间数据处理、地理空间数据管理、地理空间数据分析、地图制图与空间可视化等。
同时,也掌握了一些桌面GIS软件,例如ArcGIS、ArcMap的使用。
所有这些理论知识为将来学习WebGIS奠定了基础。
如果有不了解GIS相关的基本知识,很难进行GIS开发;与此同时,WebGIS本质上是基于Web端的地图可视化应用,因此,我们还需要了解Web的基本概念和相关知识。
03 WebGIS的入门知识
学习WebGIS开发时,我们首先要接触的是Web端开发语言,可能说到这里,很多小伙伴都知道,我们要学习HTML、CSS和JavaScript等前端编程语言。
1)HTML\CSS
其中,HTML和CSS相对简单,比较容易上手。
大家可以利用新中地给出的智慧校园、智慧交通等包含前端编程的课程熟悉这几种语言。
学完以后,我们可以很快掌握如何搭建一个网站,并在项目中用我们搭建的网站实现一些功能。

2)JavaScript
学完HTML\CSS,接下来就是JavaScript,JS相对较难,需要我们花费更多的精力学习。
JS也是我们需要重点掌握的内容,因为如果不熟练掌握JavaScript,后续将很难在项目中进行灵活运用。
JS作业:
新中地天气网页
可视化作业
到此,大家一定对这些语言有一定的了解。
接下来,就能初步了解WebGIS开发的基本知识。
当然,后续我们还需要学习更多内容,因为WebGIS开发有很多形式。例如,有些人使用ArcGIS for JS API进行开发,有些人使用OpenLayers,还有人使用Mapbox GL或Cesium。
虽然上述内容的开发形式不同,但都属于WebGIS开发,并且都是通过调用封装好的类、属性和方法来实现的,其底层逻辑是可以融会贯通的。
看到这里,相信新手已经对自己要学习的内容有所了解。那么具体应该怎么学习呢?
这里推荐小白从下面两个项目入手:
1)智慧校园:零基础可学实战项目
第一章GIS开发概述
第1节-什么是GIS开发
第2节-WebGIS开发
第3节-如何学习webGIS开发
第4节-GIS平台
第5节-术语与名词
第二章开发环境搭建
第1节-开发软件
第2节-高德开放平台
第三章Web开发篇
第1节-HTML快速入门
第2节-CSS快速入门
第3节-JavaScript快速入门
第四章WebGIS开发
第1节-开发准备
第2节-地图显示
第3节-地图控件
第4节-点标记
第5节-几何计算
第6节-GeoJSON
第五章实战案例
第1节需求分析
第2节设计方案
第3节具体实现

+文末小助手,备注【智慧校园】无偿领取
2)智慧交通实战项目
+文末小助手,备注【智慧交通】无偿获取
04 WebGIS框架
这一点我们之前重点讲过,没看过的小伙伴可以看下面的详细介绍:
这里我大致提一下,WebGIS开发的引擎分为四大类:
1)Charts可视化图表
主要负责可视化功能,以D3.js,Echarts等为代表。

2)LBS地图开放平台
LBS就是Location Based Service,国内的LBS以高德/谷歌/百度/天地图等为代表。

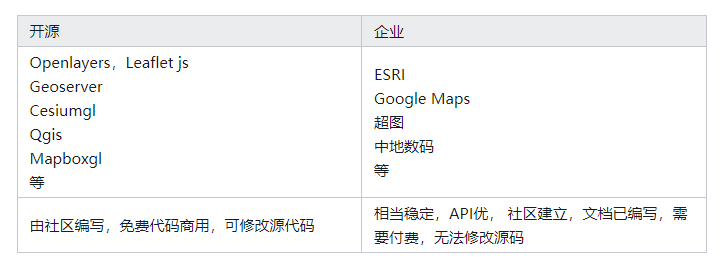
3)WebGIS商业API
这类也是工作中比较常见的,例如ESRI的ArcGIS API For JS,超图的IClient,中地数码的MapGIS Client for JS,都属于商业API。
4)WebGIS开源API
开源框架是目前使用最多最广泛的,比较出名的就有Leaflet,OpenLayers,Cesium,MapboxGL等。
根据目前就业需求来看,大多数企业要求会开源框架,因此我们学习也以开源框架为主,那这里又主要分为二维和三维框架。二维包括openlayers、leaflet等;三维包括mapbox以及threejs、cesium等。下面一一进行介绍。
二维框架:openlayers
openlayers是最所有初学者必须要掌握的第一个框架。下面是openlayers的知识图谱,来源网络:
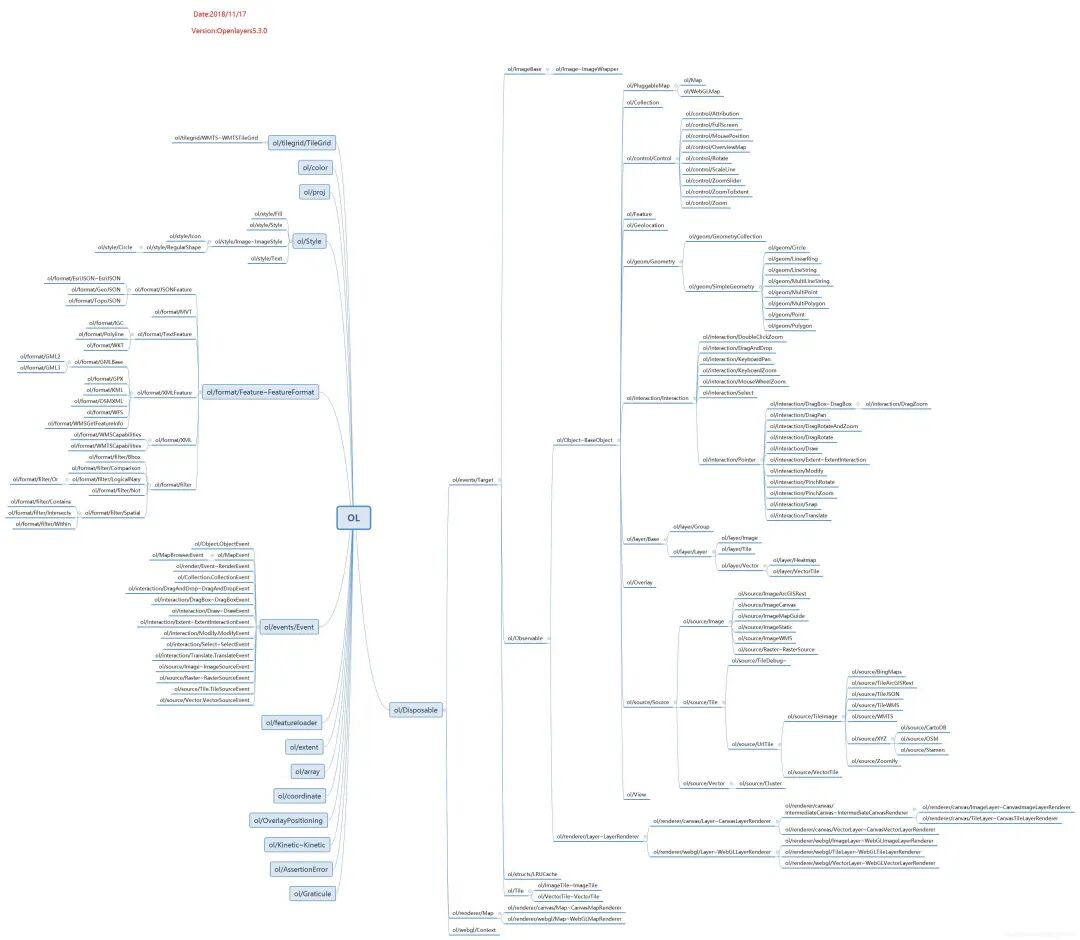
从上图中可以看出,OpenLayers 实现了上百个类,用于对GIS中的各种事物进行抽象表达。
其中 Map,Layer,Source 和 View 是 OpenLayers 框架体系中的核心类,几乎所有动作都围绕这几个核心类展开,以实现地图加载和相关操作.
在Openlayers的体系框架中,把整个地图看作一个容器(Map),核心为地图图层(Layer),每个图层有对应的数据源(Source),并由地图视图(View)进行地图表现。地图容器上还支持一些与用户交互的控件(Control 和 Interaction),另外 Openlayers 还支持事件机制。
总之,OpenLayers 使得在任何网页中放置动态地图变得很容易。它可以显示贴图,矢量从任何来源载入的数据和标记。OpenLayers 已经被开发来进一步使用各种地理信息。它是完全免费的开源JavaScript。
openlayers开发学习教程:

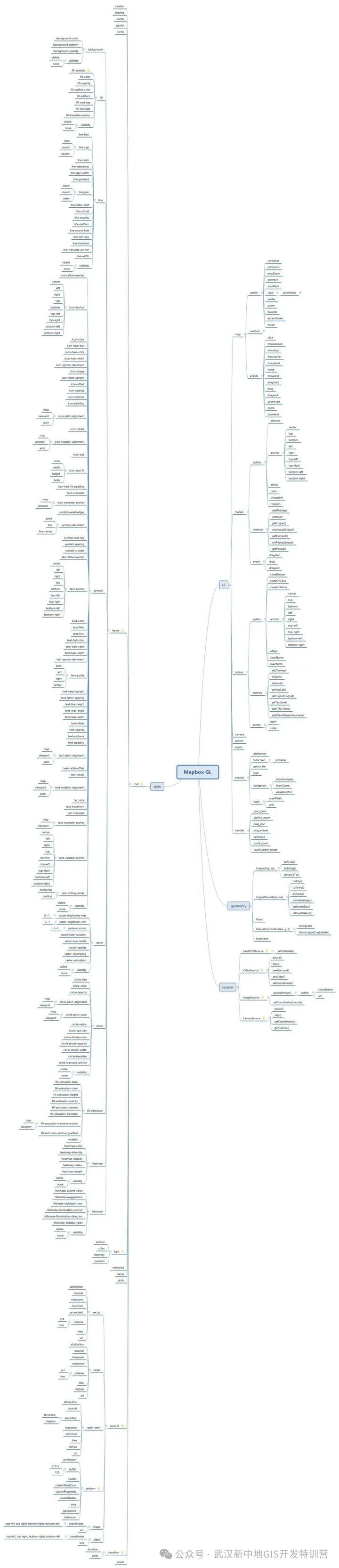
之前我们说过,Mapbox是二三维结合的一款框架,也是三维框架里面最容易入手的一个。
三维框架Mapbox
官网:https://www.mapbox.com/
Mapbox是⼀个可以创建各种自定义地图的网站,如 Pinterest、Evernote、Github、500px 等大牌都使用Mapbox创建地图。
Mapbox宣称要构建世界上最漂亮的地图。
已为Foursquare、Pinterest、Evernote、⾦融时报、天⽓频道、优步科技等公司的网提供了订制在线地图服务。
Mapbox针对不同平台均开发了相应的GIS引擎以满⾜开发者或相关用户的需要,如:iOS SDK(⽤于iOS端开发)、Android SDK(用于Andriod端开发)、Navigation SDK(用于Navigation端开发)、Unity SDK(用于Unity端开发)、GL JS(用于web端开发)。
不同平台的SDK,除使用⽅式不同外,功能特性上也多多少少存在不同。此外,Uber还针对react开发了 react-map-gl。
总的来说,Mapbox的开源技术栈是⾮常全面的。

完整版PDF+视频教程+源码
+文末小助手,备注mapbox无偿获取
三维框架:cesium
Cesium是一款使用JavaScript开发的基于WebGL的,能够实现三维地球和地图可视化的JS库。
Cesium支持海量的三维模型数据、影像数据、地形高程数据、矢量数据等丰富的地理数据的加载。在交通,规划,城市管理,地形仿真等领域有非常广泛的应用。
前面也给大家反复介绍过cesium,它是目前功能最齐全的三维GIS开发框架,也是在就业过程中,企业最看重、面试最容易被考核的一个。

初学者刚接触Cesium时,看到它的文档,可能会被震惊到。
毕竟cesium库中的类实在是太多,每一个类又有大量的函数和属性,而且官网的文档又是英文,这给我们学习GIS开发的同学带来了极大的困扰。
cesium.js库
但是接触多了,我们会发现,其实Cesium开发文档里边的好多类属性和方法都是一样的。比如,在Cesium中,一个非常重要的类是Viewer。
如果要使用Cesium创建一个三维窗口,几乎无法避免使用Viewer类。因为它代表了Cesium的三维窗口。
标志性建筑
全局飞线

















 964
964

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









