



期中:
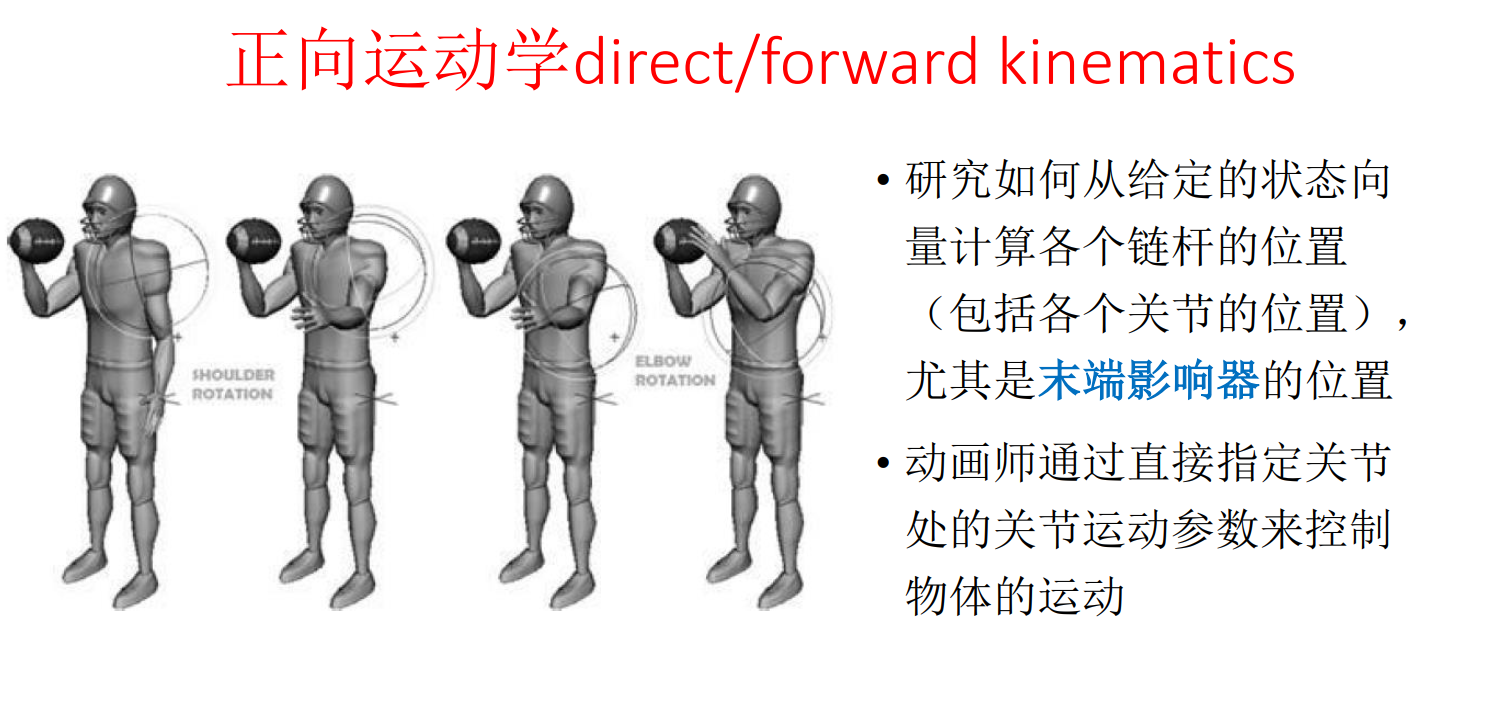
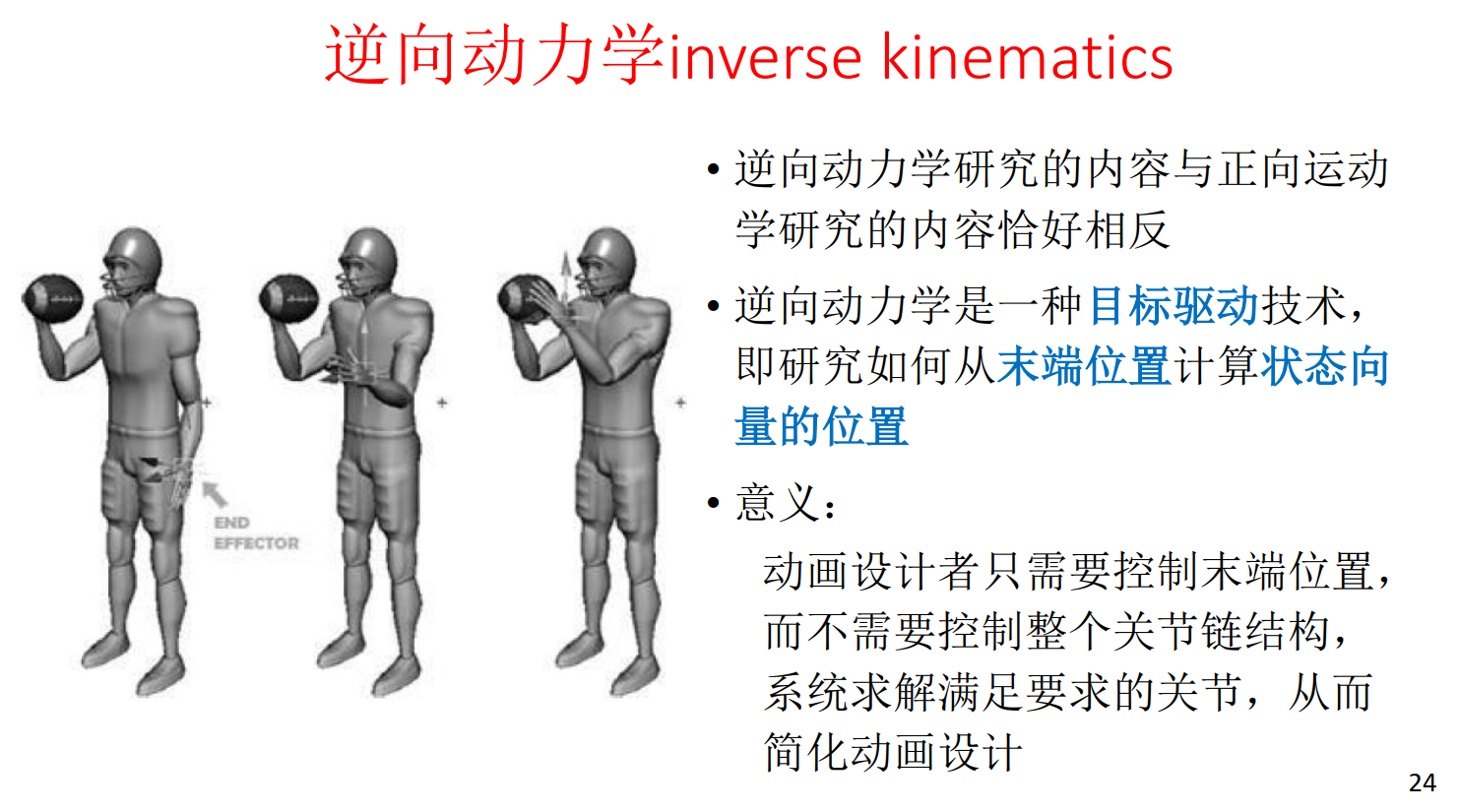
一、正向动力学和逆向动力学的概念?逆向动力学的意义?
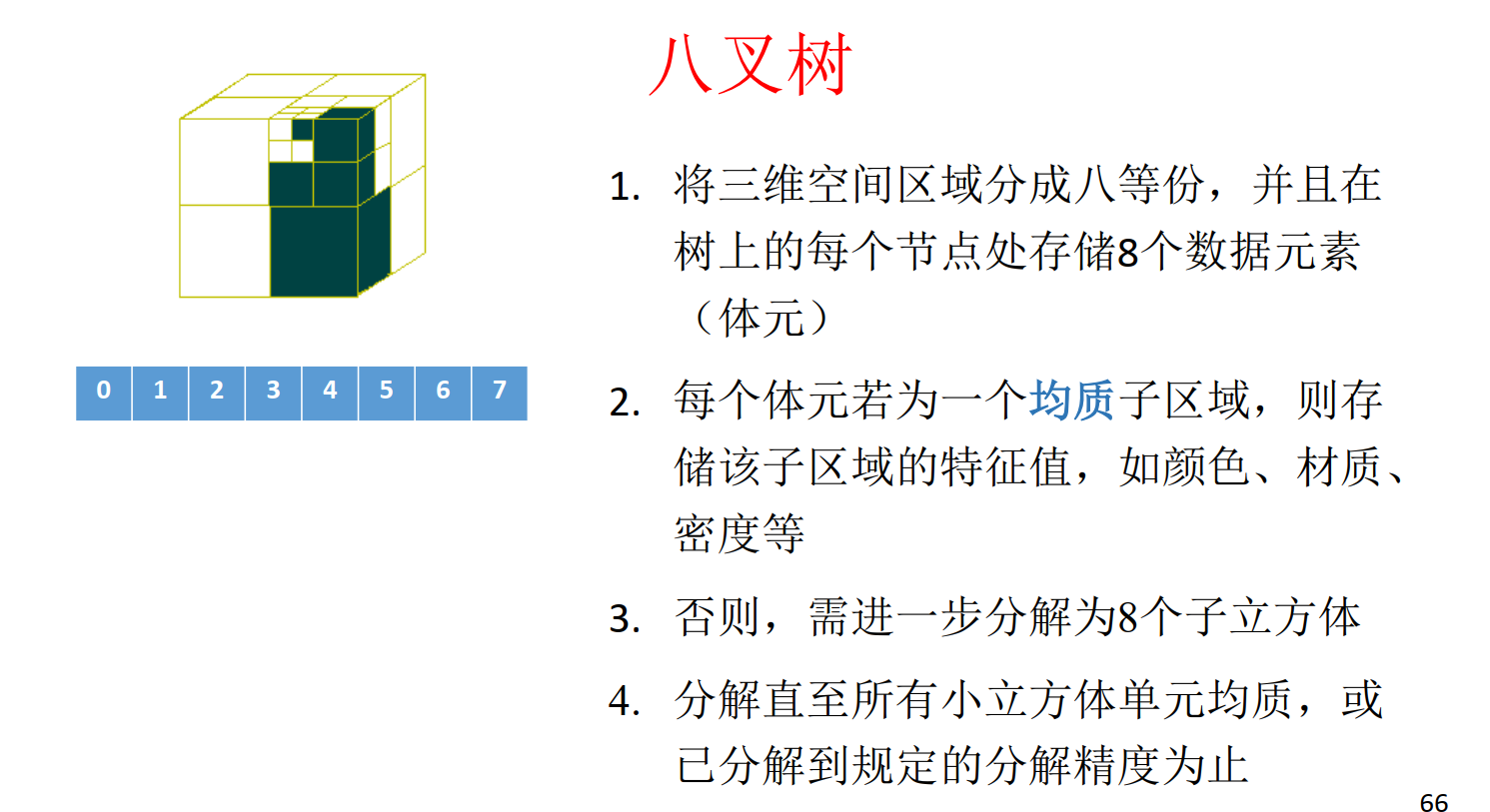
二、四叉树原理?八叉树原理?八叉树优点?
(是不是这三个问题记不清了,但是至少八叉树原理建议背下来)
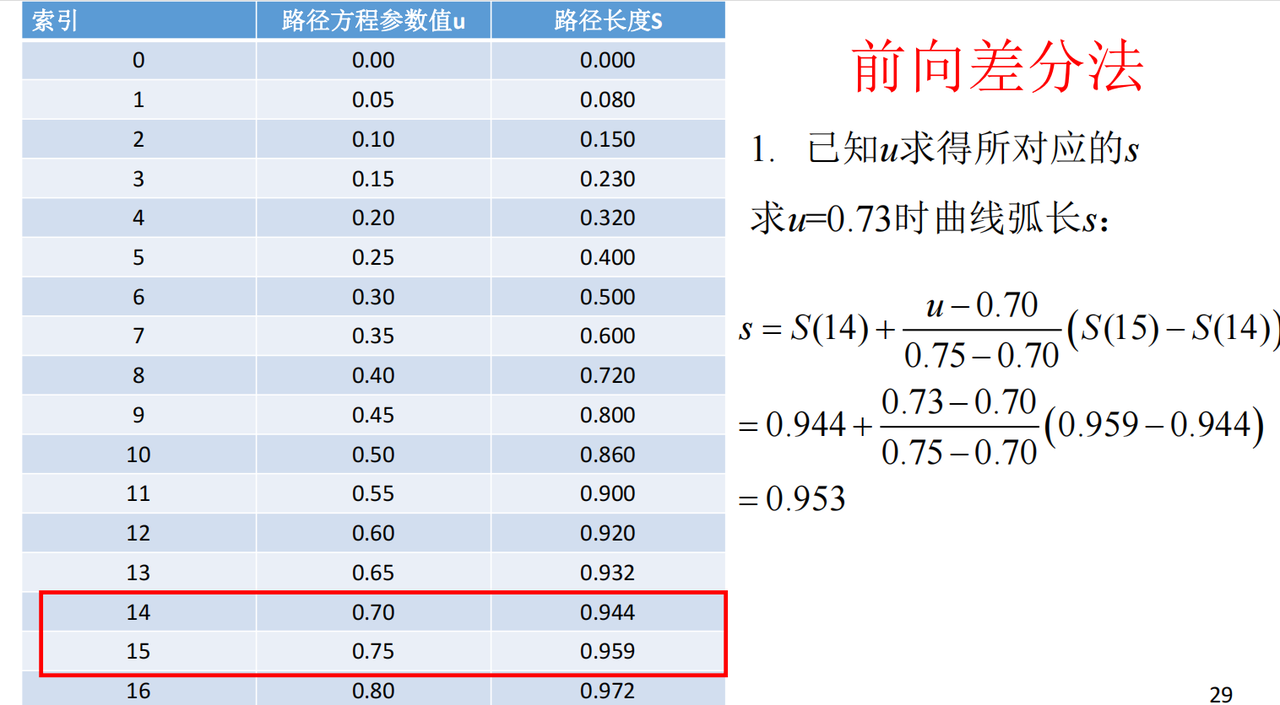
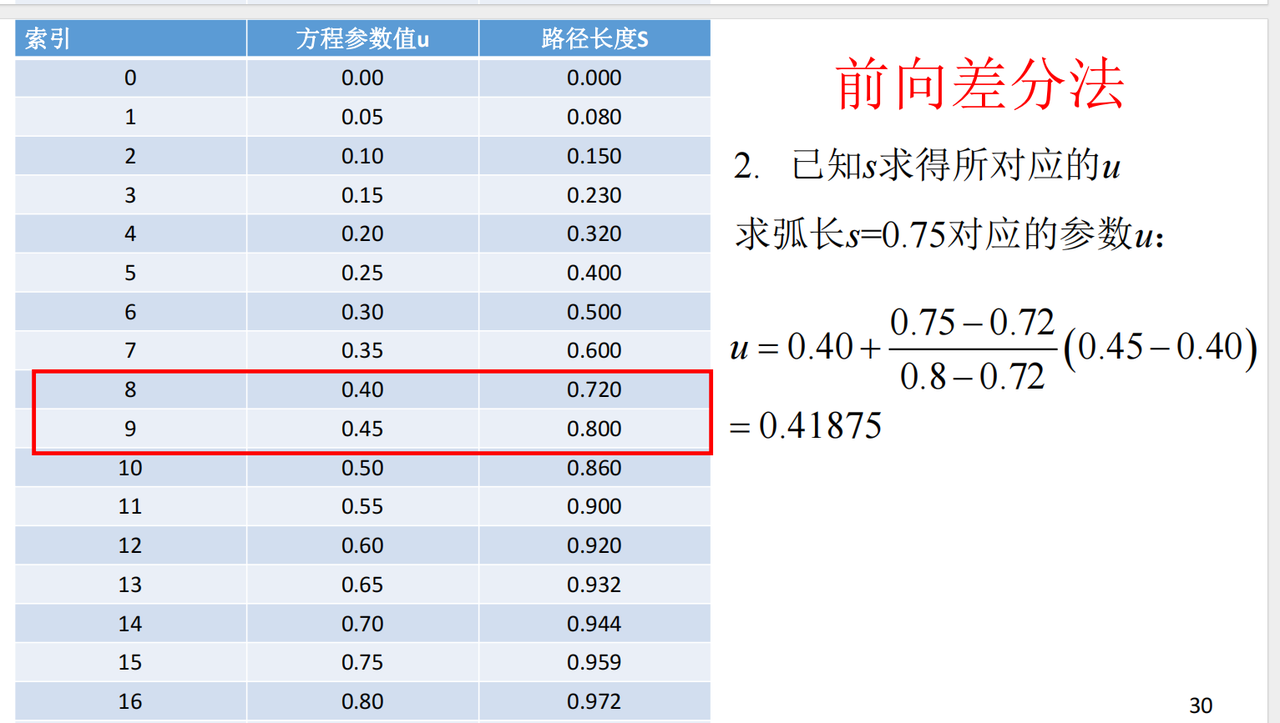
三、易入/易出概念?前向差分法计算。
概念:对象从静止位置从加速运动达到最大速度,最终减速运动至静止处。
计算题类似:
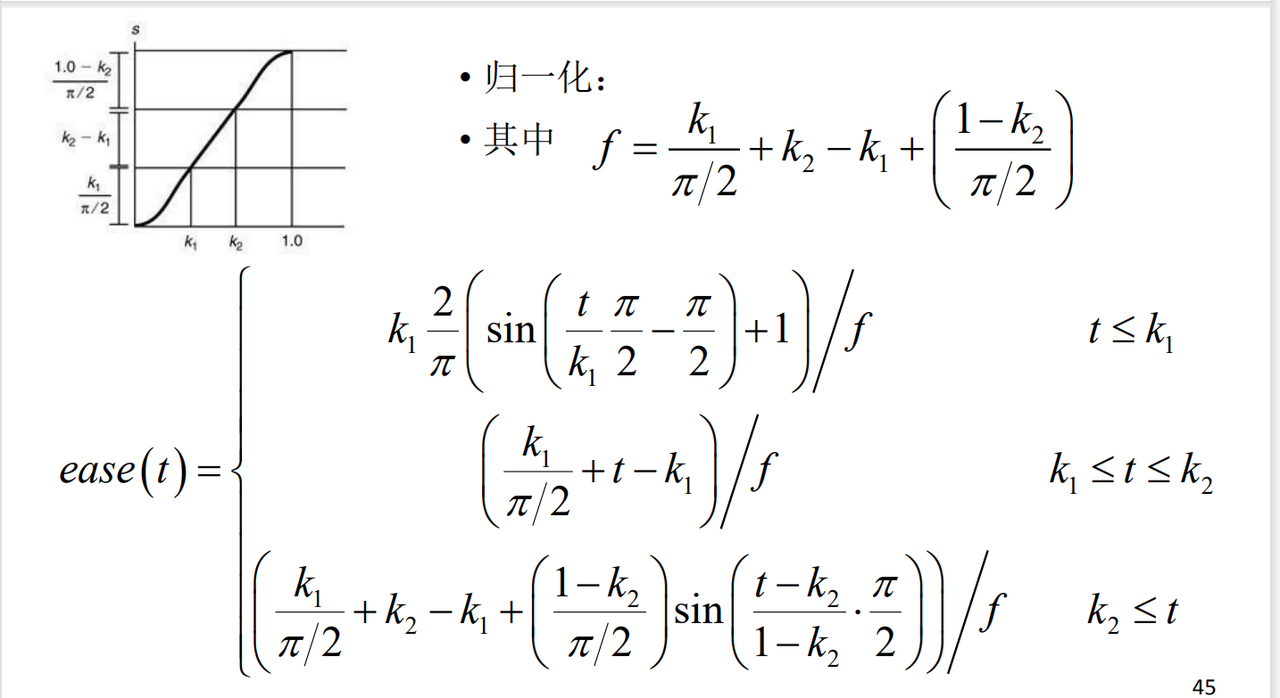
四、采用一元三次多项式实现易入/易出移动控制特性的缺点是什么?请写出正线片段+直线实现易入/易出的实现方案。
缺点:未提供匀速的控制方式
五、简述CCD算法求解关节链的过程
六、牛顿法求解关节链
1.正向运动学求解三链杆关节链末端影响器位置坐标
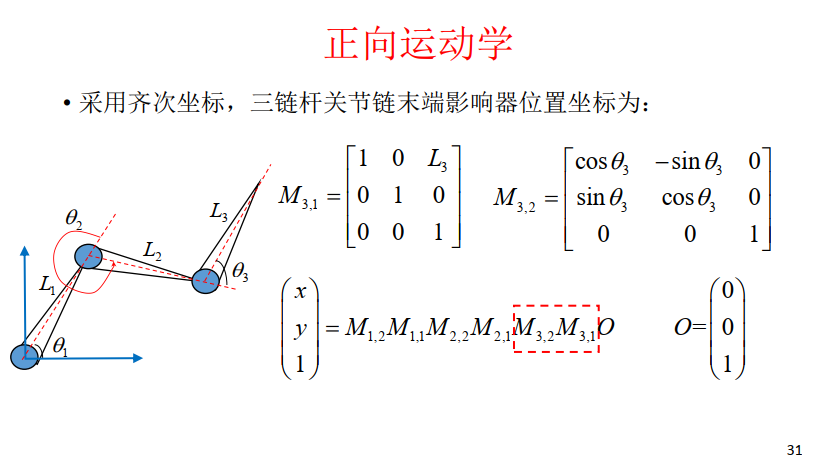
2.牛顿法、求雅可比矩阵,类似这题:
第五六题的过程几乎和PPT上一样,请自行查阅PPT或者飞书文档( 图形与动画Ⅰ&Ⅱ| 2025 - 飞书云文档)的对应部分
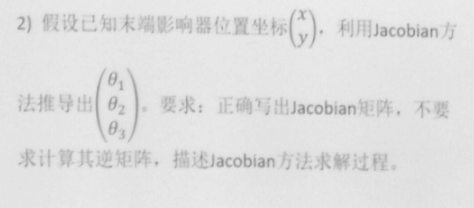
七、给出二维的t时刻的速度、位置,以及恒定的加速度。分别用改进欧拉、辛欧拉、隐式欧拉,计算t+Δt时刻的速度和位置。
类似这题:
期末:
一、简答题
1.实体构造法的具体方法是?简述它们的概念
扫描表示法 – 通过平移、 旋转及其他对称变换来构造三维对象
结构实体几何法 – 使用集合操作(并、交或差操作)来组合多个三维对象
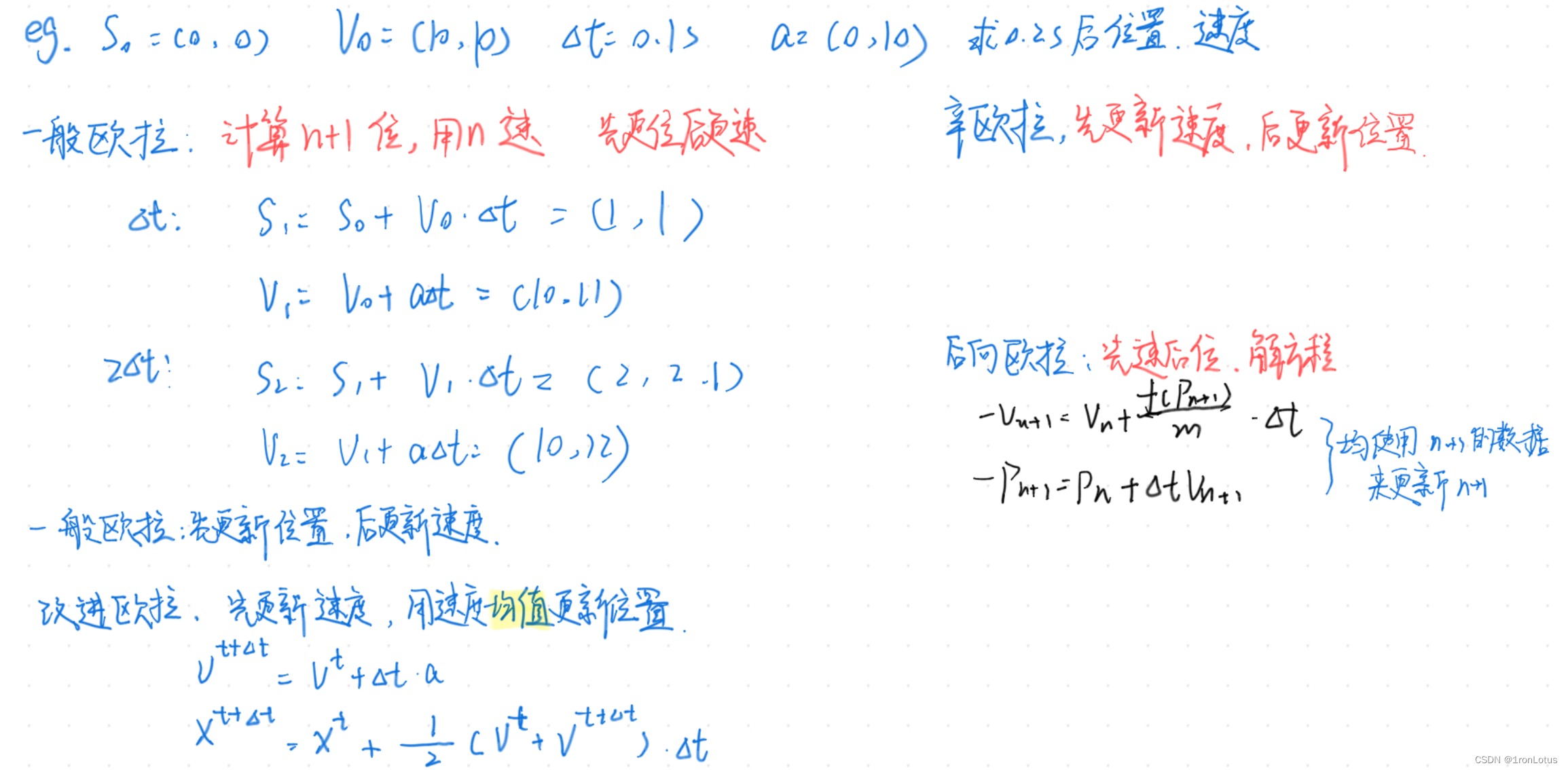
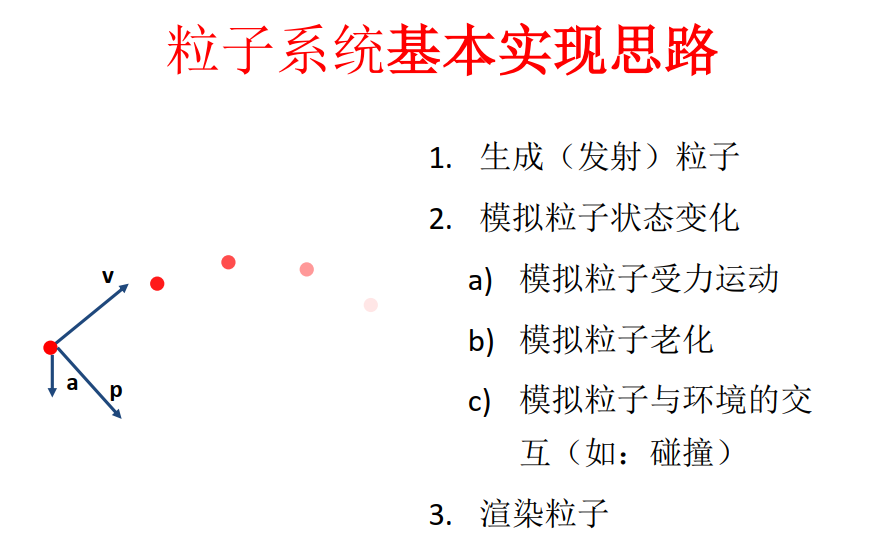
2.简述粒子系统的实现过程
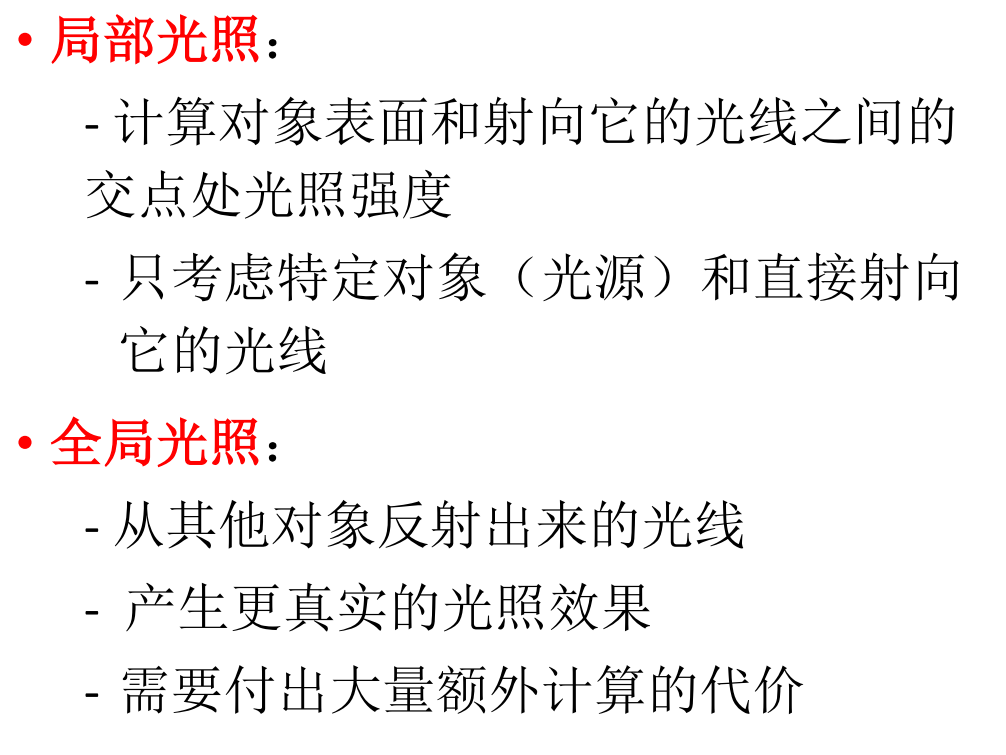
3.全局光照和局部光照的区别是?
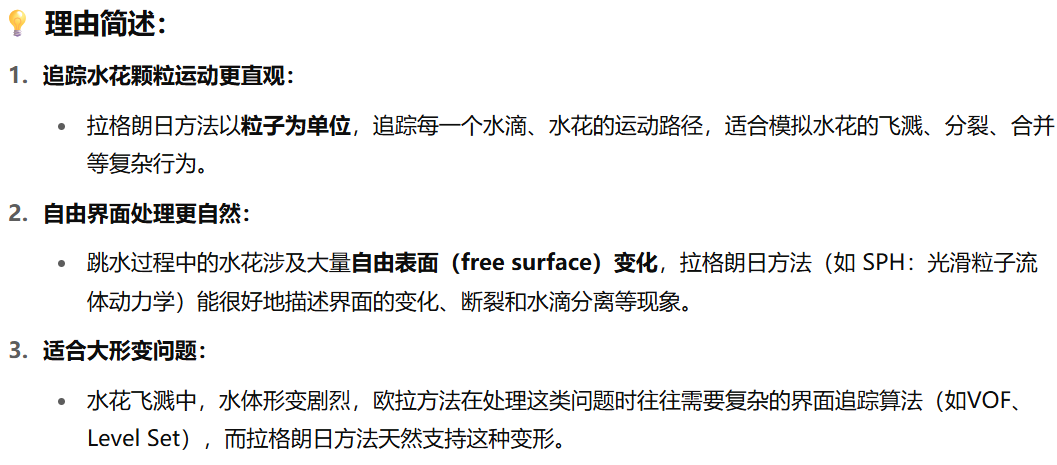
4.流体模拟:要模拟人跳入水中溅起的水花,选用欧拉方法还是拉格朗日方法?简述理由。
可以考虑以下方面:

选择拉格朗日方法,以下是GPT给的理由:
二、给出二维的t, t-Δt时刻的速度、位置,以及恒定的加速度。分别用改进欧拉、辛欧拉、韦尔莱法计算t+Δt时刻和t+2Δt时刻的速度和位置。
类似期中最后一题。这里有一个点可以思考:采用欧拉方法计算t+2Δt时刻的速度和位置时,应该使用t时刻的数据还是t+Δt时刻的数据?
我认为应该使用t+Δt的数据,因为欧拉方法是迭代的,每一步只能使用上一步的值。
三、贝塞尔曲线。二维平面中,给出一个使用二阶贝塞尔曲线进行非线性插值的图,类似这个:
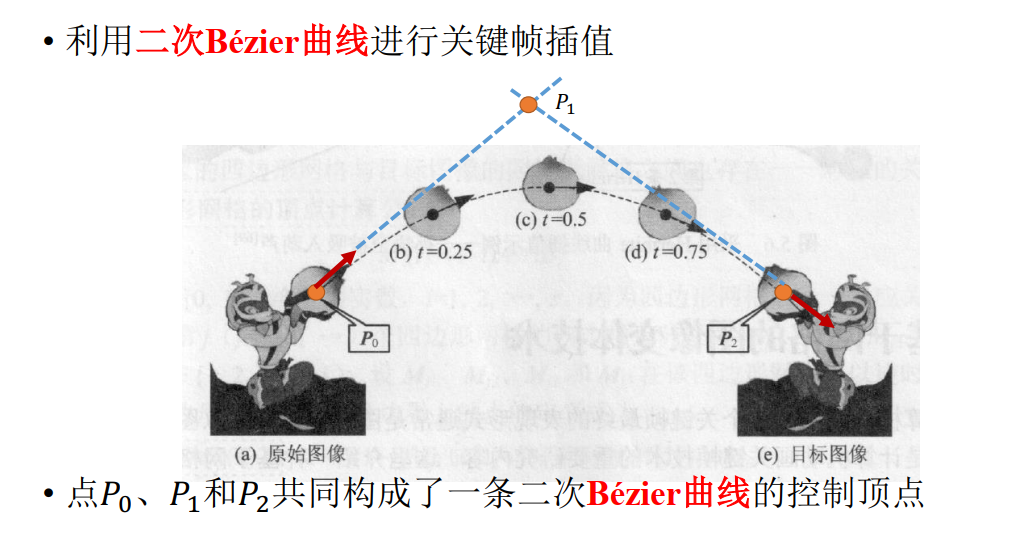 1.推导对象在中间帧的位置计算公式
1.推导对象在中间帧的位置计算公式

2.给出三点坐标和t值,计算P点坐标
代入计算即可
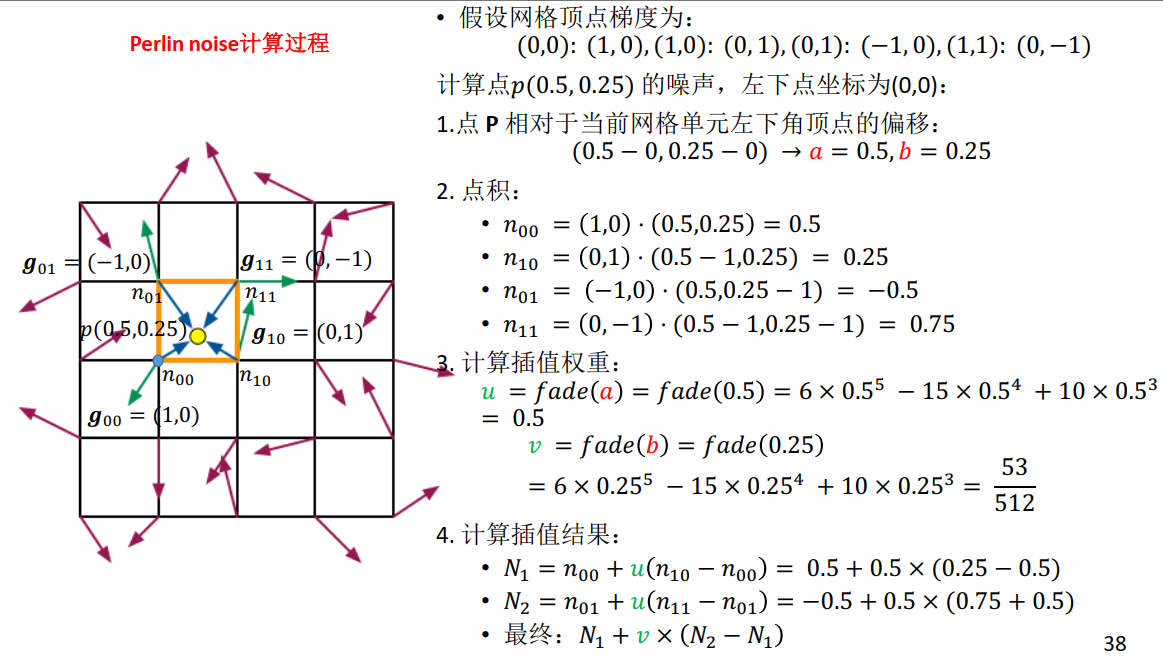
四、Perlin噪声。和PPT上的例题几乎一样,改了数据。
fade函数的式子的考试时给出了
五、牛顿法,雅可比矩阵
和期中第六题相同
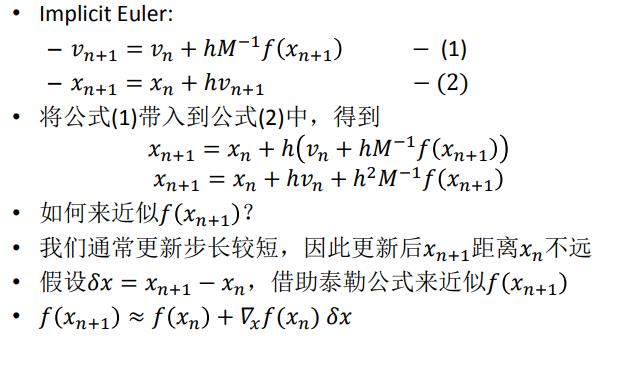
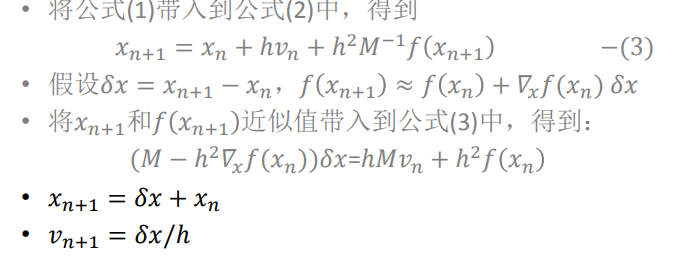
六、泰勒展开推导隐式欧拉
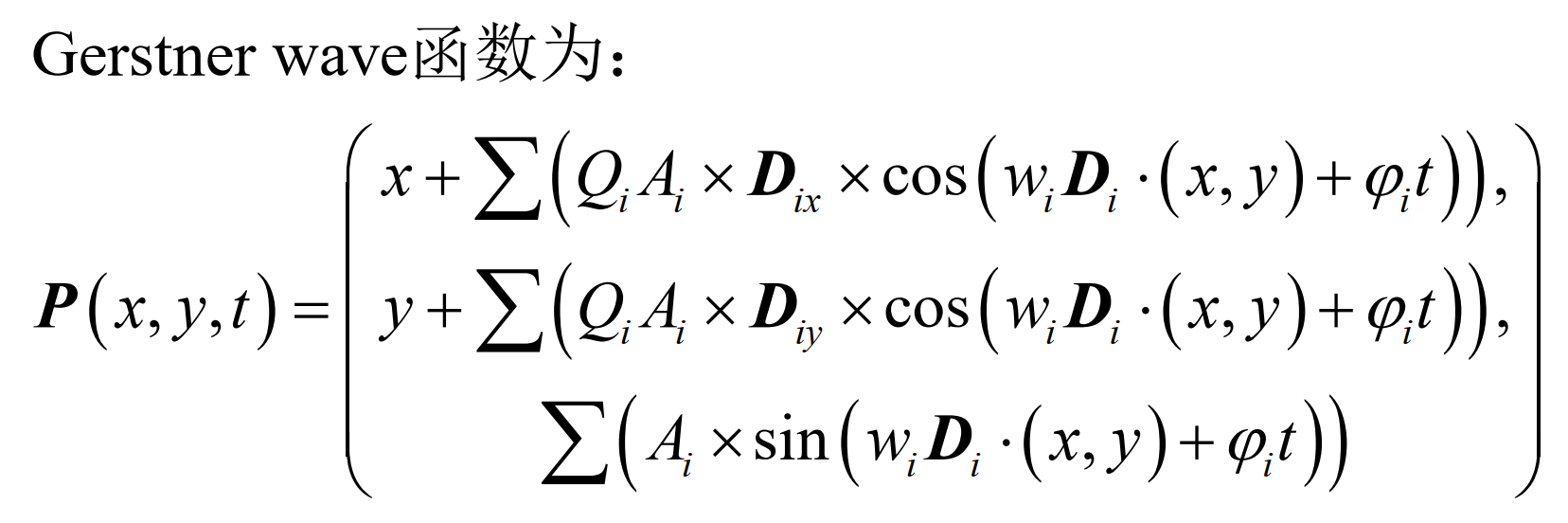
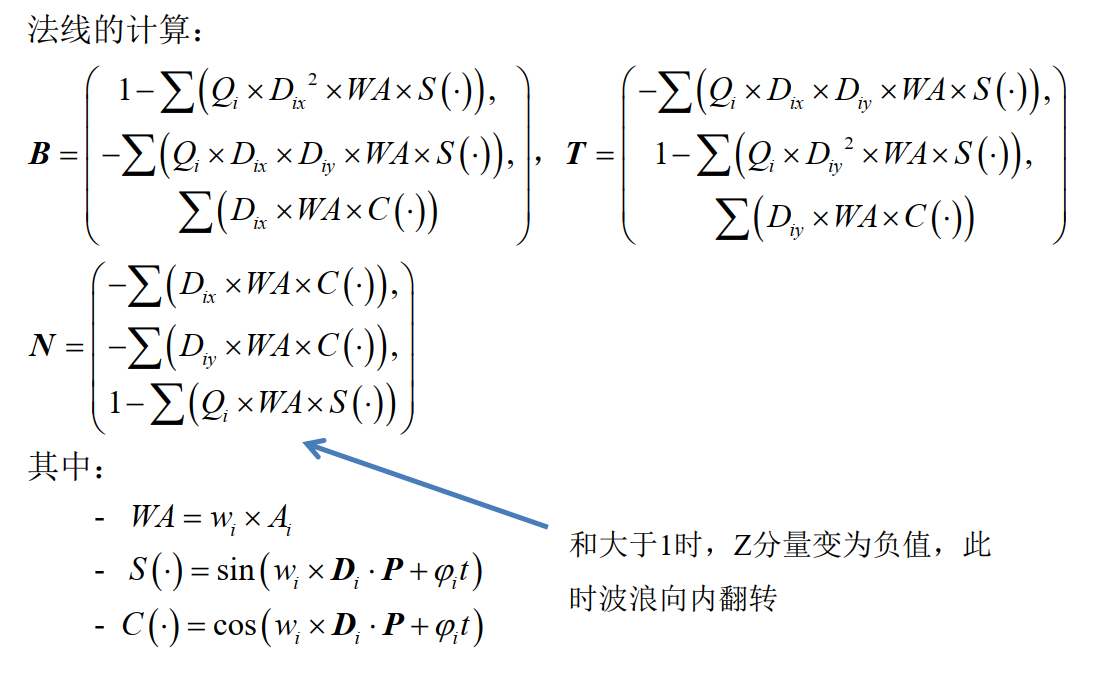
七、Gerstner Wave。给出函数,求法向量。
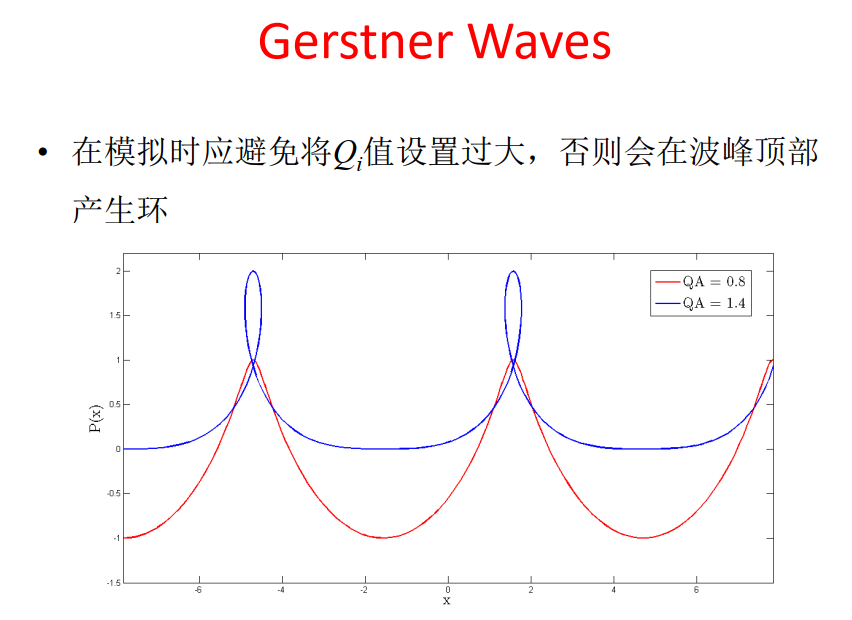
给出图,问为什么会出现环。(给了提示:先计算出z方向的法向量,再思考为什么出现环)
答案:
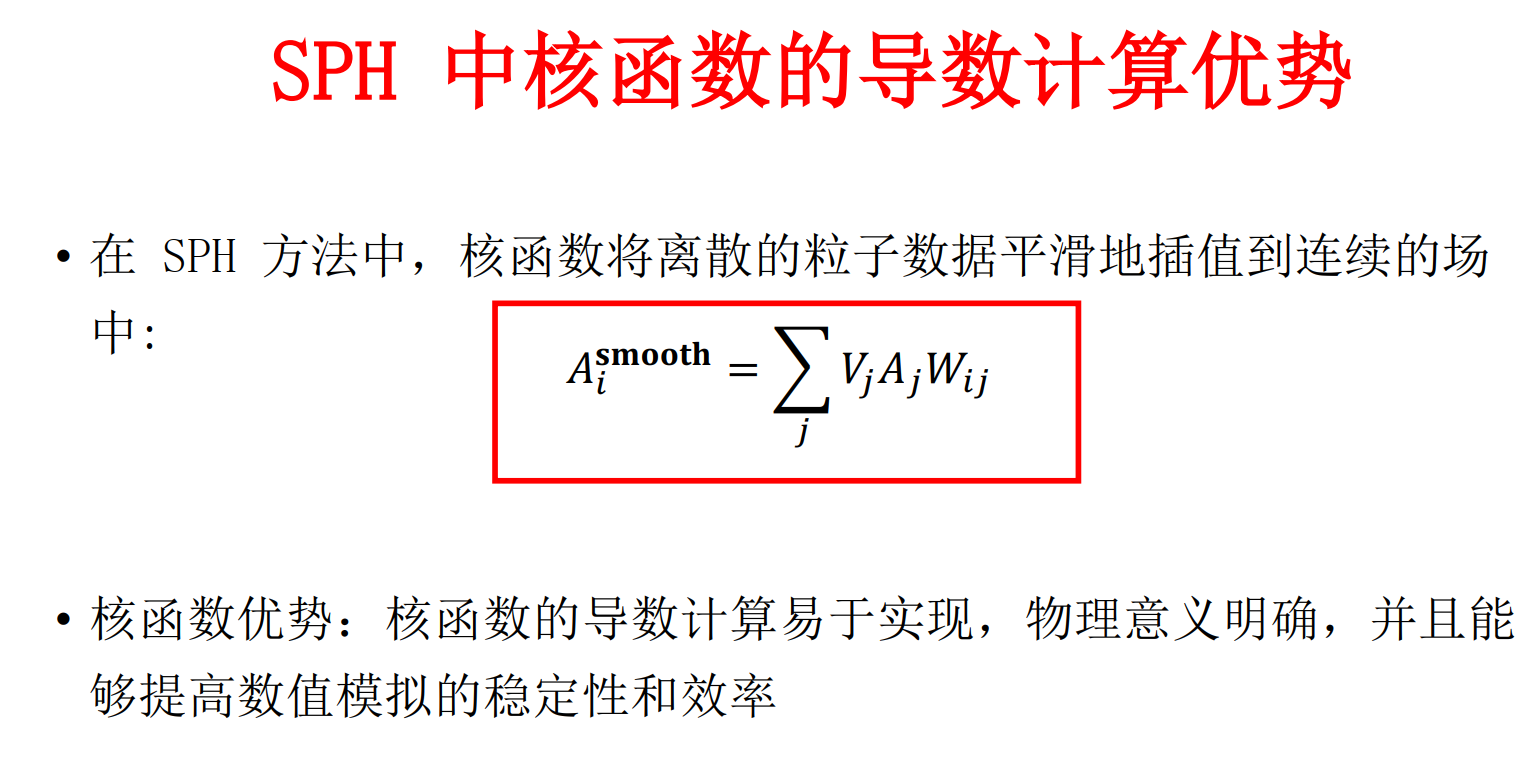
八、SPH。给了下图公式,推导Vi的公式。并解释其物理意义。(给了提示:先使用公式计算密度,再用代入密度和体积的公式)

推导:
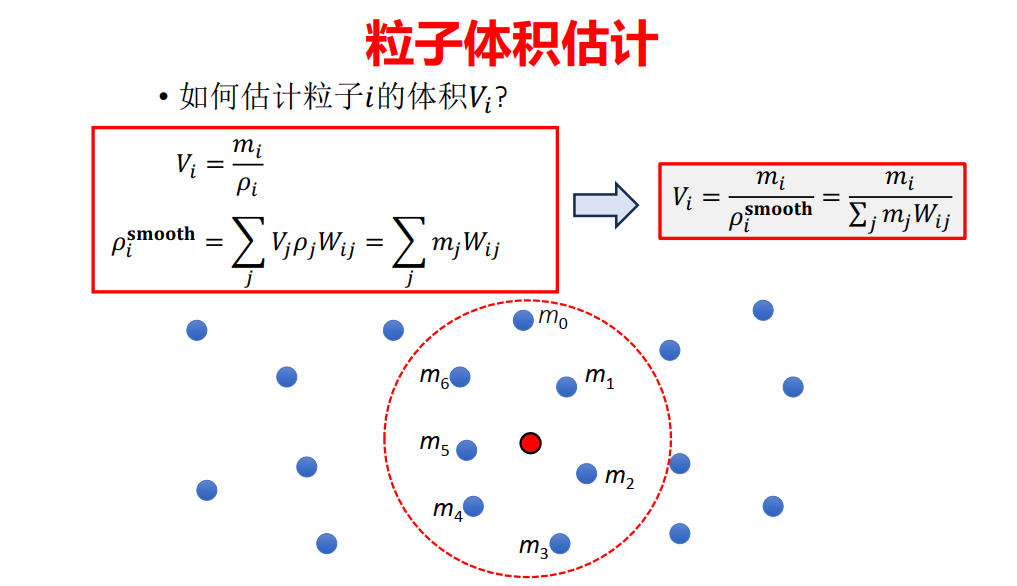
物理意义应该是这个:
总结:我认为期末的题目和往年难度差不多,甚至更简单一些。
今年将流体模拟也纳入考试范围,期末也考了不少今年PPT新加入的内容,但是都是挑最简单的部分考,复杂一点的(比如SPH后面的部分、Navier-Stokes方程)都避开了;简答感觉也在试图出一些新的内容,避免和老考题重合太多,还是尽量复习全面一些。
但是依然有很多重点还是和之前的考题重合了,比如牛顿法、泰勒展开推导隐式欧拉、Gerstner Waves都是之前考过的,把往年题对应的PPT内容弄懂了也能得到大部分分数了。

















 2752
2752

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









