







1 计算机系统概述
计算机系统由硬件和软件两部分组成,而软件又进一步由系统软件和应用软件组成。
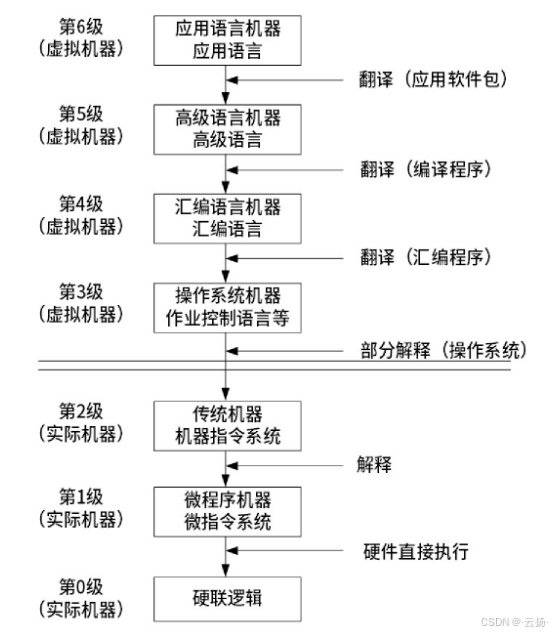
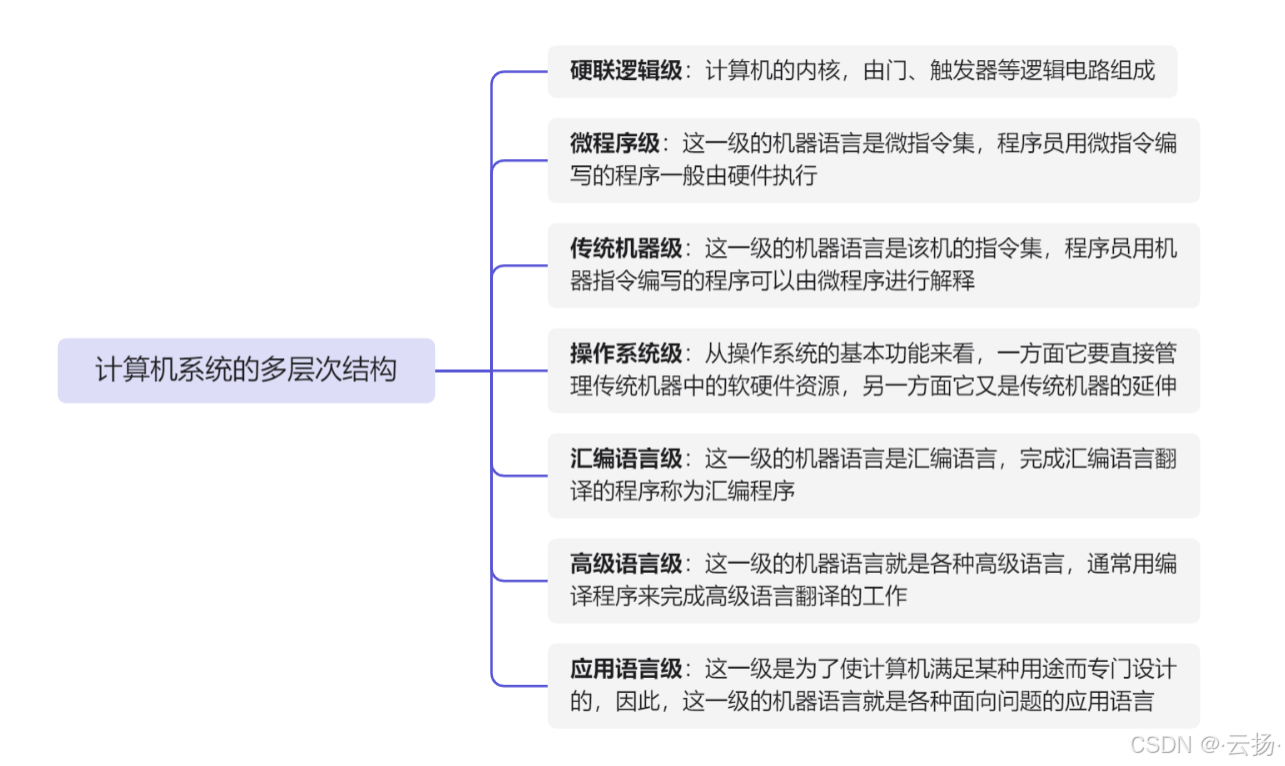
 1.1 计算机系统的多层次结构
1.1 计算机系统的多层次结构
1.2 冯诺依曼体系结构

冯·诺依曼体系结构包括:
- 中央处理单元(CPU):负责执行指令和处理数据。CPU内部通常包含算术逻辑单元(ALU)、控制单元(CU)和一组寄存器。
- 存储器:用于存储数据和程序指令。存储器通常分为两种类型:主存储器(如RAM)和辅助存储器(如硬盘)
- 输入设备:用于向计算机输入数据和指令,常见的输入设备包括键盘、鼠标和扫描仪等
- 输出设备:用于从计算机输出处理结果,常见的输出设备包括显示器、打印机和扬声器等
- 总线系统:用于在各个组件之间传输数据、地址和控制信号。
特点:
- 存储程序:冯·诺依曼体系结构的核心特点是“存储程序”概念,即计算机程序和数据都以二进制形式存储在同一存储器中。这意味着程序可以像数据一样被读取、修改和执行。
- 顺序执行:CPU按照存储器中指令的顺序依次执行程序,除非遇到跳转或分支指令,这使得程序的执行具有一定的线性逻辑。
- 层次化存储:冯·诺依曼体系结构中的存储器通常分为多个层次,包括高速缓存(Cache)、主存储器(RAM)和辅助存储器(如硬盘),以满足不同速度和容量的需求。
2 存储系统
2.1 层次化存储体系
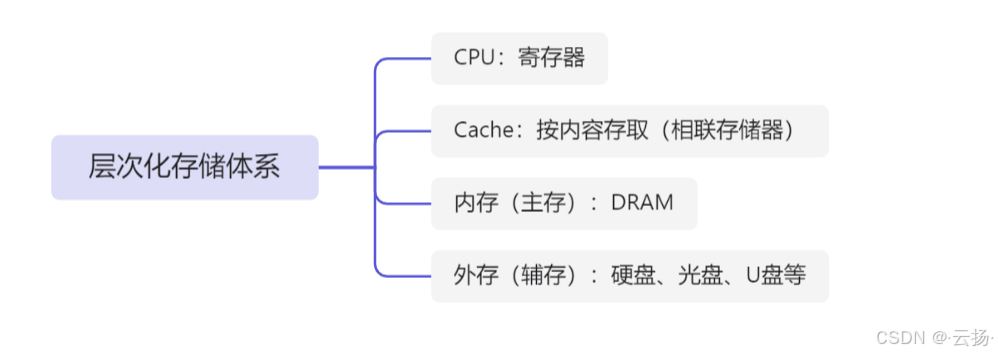
- 层次的速度、容量、成本的对比
离CPU越远,速度越慢,成本越低,容量越大- 特殊的存储器
- 相联存储器:按内容存取;用在Cache上
- DRAM
- RAM,随机存取器:掉电数据会丢失
- ROM,只读存储器:掉电数据不丢失
- DRAM,动态RAM:会周期性刷新
- 用在内存上
- Cache
解决CPU和主存之间速度容量不匹配的问题- 局部性原理的支撑
- 时间局部性:指程序中的某条指令一旦执行,不久以后该指令可能再次执行,典型原因是由于程序中存在着大量的循环操作
- 空间局部性:指一旦程序访问了某个存储单元,不久以后,其附近的存储单元也将被访问,即程序在一段时间内所访问的地址可能集中在一定的范围内,其典型情况是程序顺序执行
- 工作集理论:工作集是进程运行时被频繁访问的页面集合。
2.2 Cache
2.2.1 基本概念
Cache的功能:提高CPU数据输入输出的速率,突破冯·诺依曼瓶颈,即CPU与存储系统间数据传送带宽限制
在计算机的存储系统体系中,Cache是除寄存器以外,访问速度最快的层次
Cache对程序员来说是透明的
使用Cache改善系统性能的依据是程序的局部性原理
- 时间局部性
- 空间局部性
Cache的内容是对主存内容的复制
系统的平均周期:
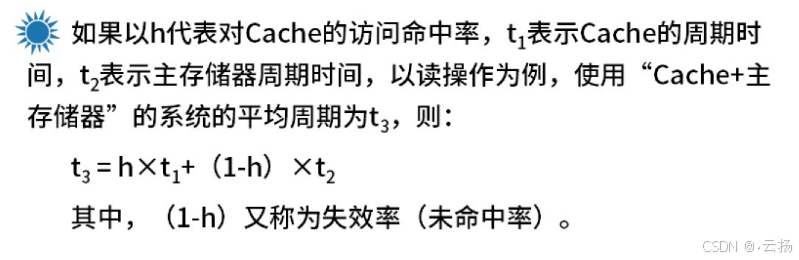
假设:命中率90%,Cache存取时间1ms,内存存取时间100ms,则系统的平均周期为:
t3 = h * t1 + (1 - h ) * t2 = 90% * 1 + (1- 90%) *100 = 0.9+10 = 10.9ms
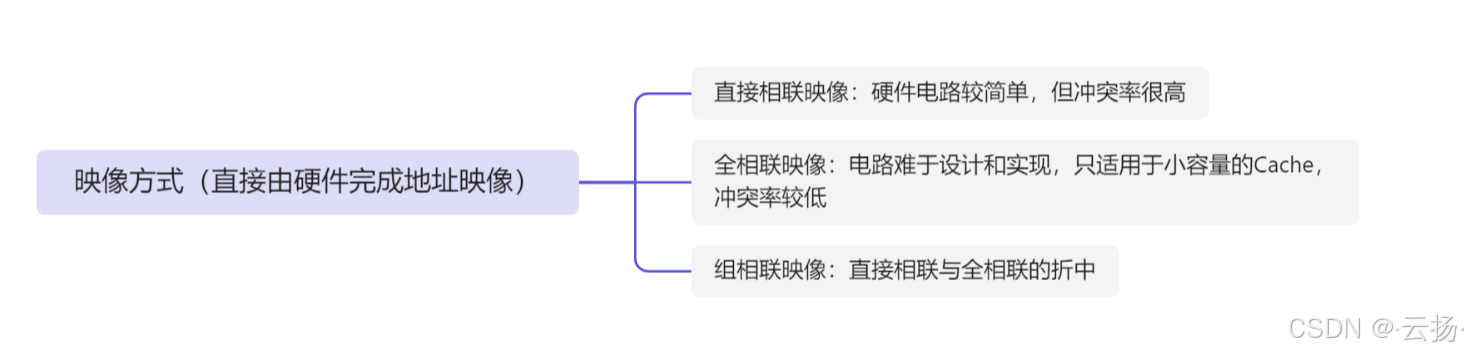
2.2.2 映像方式
地址映像是将主存与Cache的存储空间划分为若干大小相同的页(或称为块)。
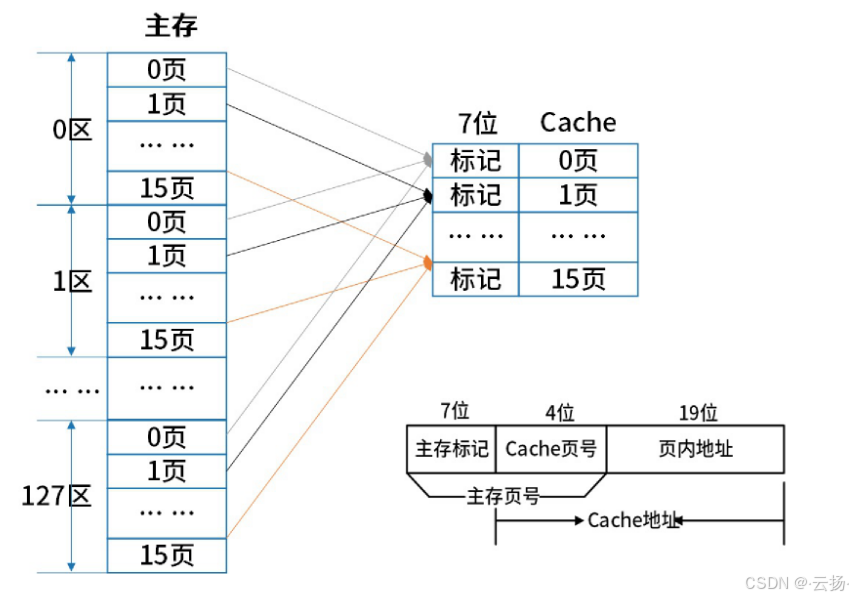
例如,某机的主存容量为1GB,划分为2048页,每页512KB;Cache容量为8MB,划分为16页,每页512KB。
2.2.2.1 直接相联映像
 在这种映射方式中,主存储器(RAM)中的每个数据块都被唯一地映射到缓存中的一个特定位置。直接相联映像的特点如下:
在这种映射方式中,主存储器(RAM)中的每个数据块都被唯一地映射到缓存中的一个特定位置。直接相联映像的特点如下:
- 固定映射:每个主存储器块都有一个固定的缓存位置。这种映射是通过使用主存储器地址的一部分来确定缓存行(Cache Line)的位置来实现的。例如,如果缓存有N行,主存储器地址的低M位(2^M = N)可以用来选择缓存行。
- 简单快速:直接相联映像的实现相对简单,硬件开销小,查找速度快。因为每个主存储器块只有一个可能的缓存位置,所以不需要复杂的查找机制。
- 冲突缺失:由于每个缓存位置只能存储一个主存储器块,当多个主存储器块映射到同一个缓存位置时,就会发生冲突缺失(Conflict Miss)。这意味着即使缓存未满,也可能因为位置冲突而导致数据无法被缓存。
- 有限的灵活性:直接相联映像的灵活性有限,因为它不允许数据块存储在缓存的任意位置。这可能导致缓存利用率不高,尤其是在程序访问模式不规则的情况下。
- 标签比较:在直接相联映像中,当需要检查缓存是否包含某个数据时,CPU需要比较地址的高位部分(标签)和缓存中的标签,以确定是否命中。
2.2.2.2 全相联映像
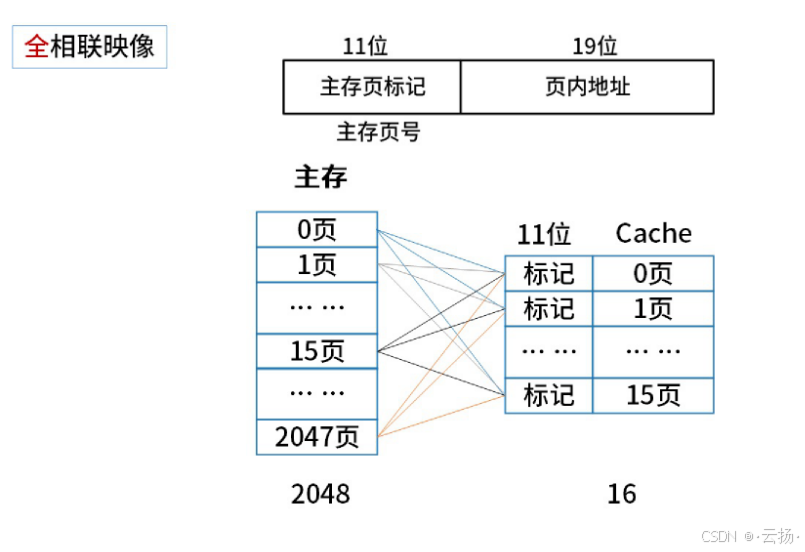
全相联映像(Fully Associative Cache)是一种缓存映射技术,它允许主存储器中的任何数据块存储在缓存中的任何位置。这种映射方式提供了最大的灵活性,但也带来了一些特点和挑战:
-
灵活存储:在全相联映像中,主存储器中的数据块可以放置在缓存的任何位置,没有固定的映射关系。这提供了最大的灵活性,可以减少冲突缺失(Conflict Miss)的可能性。
-
复杂的查找机制:由于任何数据块都可以存储在任何缓存位置,因此需要一个复杂的查找机制来确定缓存中是否有所需的数据。这通常涉及并行比较所有缓存行的标签,以检查是否命中。
-
高硬件成本:全相联映像需要更多的硬件资源来实现并行查找和标签比较。这包括更多的比较器和更复杂的控制逻辑,因此成本较高。
-
高命中率:由于数据块可以存储在缓存的任何位置,全相联映像通常能提供较高的缓存命中率,尤其是在访问模式不规则或数据局部性较低的情况下。
-
替换策略:当缓存满时,需要一个替换策略来决定哪个缓存行将被替换。常见的替换策略包括最近最少使用(LRU)、先进先出(FIFO)和随机替换等。
-
适用于小缓存:由于硬件成本和复杂性,全相联映像通常用于较小的缓存,如一级缓存(L1 Cache)或缓存中的某些特殊区域。
全相联映像提供了最佳的缓存利用率和最低的冲突缺失率,但它的实现成本和复杂性限制了它在大型缓存中的应用。
2.2.2.3 组相联映像
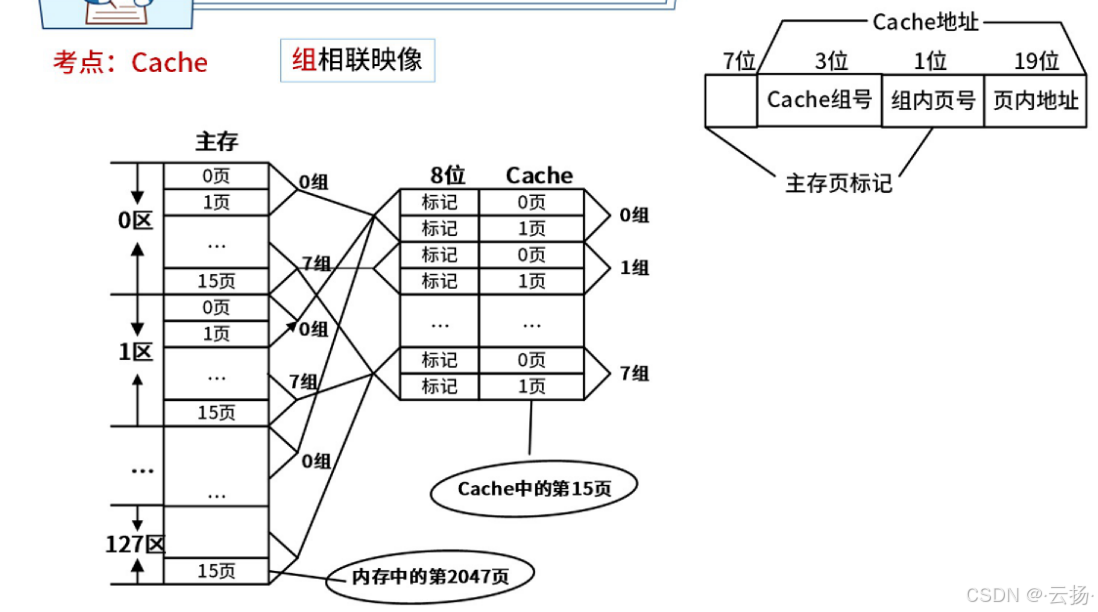
组相联映像(Set Associative Cache)是一种介于直接相联映像和全相联映像之间的缓存映射技术。在这种映射方式中,缓存被划分为多个组(sets),每个组包含多个缓存行(cache lines)。主存储器中的数据块可以映射到特定组中的任何一个缓存行,但只能映射到该组,不能跨组映射。组相联映像的特点如下:
-
分组映射:缓存被划分为多个组,每个组包含一定数量的缓存行。主存储器地址的一部分用于选择组,另一部分用于在组内选择具体的缓存行。</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









