







1. 并发服务器端的实现方法
(1)多进程服务器:通过创建多个进程提供服务
(2)多路复用服务器:通过捆绑并统一管理I/O对象提供服务器
(3)多线程服务器:通过生成与客户端等量的线程提供服务
2. 通过调用fork函数创建进程
#include <unistd.h>
pid_t fork(void);
// 成功返回进程ID,失败返回-1父进程:fork函数返回子进程ID
子进程:fork函数返回0
程序中通过fork函数的返回值来区分父进程和子进程
// fork.c
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
int gval = 10;
int main(int argc, char* argv[])
{
int ival = 20;
pid_t pid = fork(); // 创建子进程
if( pid == 0)
gval+=2, ival +=2; // 子进程执行
else
gval-=2, ival -=2; // 父进程执行
if( pid ==0 )
printf("Child Proc:[%d, %d] \n", gval, ival); // 子进程执行
else
printf("Parent Proc:[%d, %d] \n", gval, ival); // 父进程执行
return 0;
}运行结果:
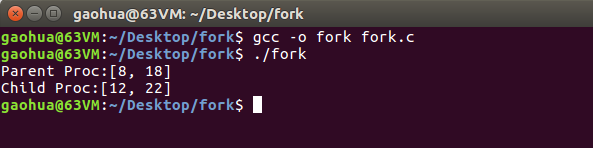
通过运行结果可以看出,父子进程拥有完全独立的内存结构。
3. 销毁僵尸进程
(1)父进程中调用wait进入阻塞,等待子进程结束
(2)非阻塞的waitpid函数
4. 信号处理
因为父进程也有自己的事情要做,所以通过父进程调用wait或waitpid销毁子进程的方法在有时会影响效率,
我们可以使用信号让操作系统协助我们的工作。
#include <signal.h>
int sigaction( int signo, const struct sigaction* act, struct sigaction* oldact);
// 成功返回0,失败返回-1signo: 与signal函数相同,传递信号信息
act: 对应于第一个参数的信号处理函数(信号处理器)信息
oldact:通过此参数获取之前注册的信号处理函数指针,若不需要则传递0
调用该函数之前需要声明并初始化sigaction结构体变量,该结构体定义如下:
struct sigaction
{
void (*sa_handler)(int);
sigset_t sa_mask;
int sa_flags;
}此结构体的sa_handler成员保存信号处理函数的指针值(地址值)
sa_mask和sa_flags用于指定信号相关的选项和特性,我们这里将所有位均初始化为0即可
下面是使用sigaction函数的程序示例:
#include <stdio.h>
#include <unistd.h>
#include <signal.h>
void timeout(int sig)
{
if(sig == SIGALRM)
puts("Time out!");
alarm(2);
}
int main()
{
int i;
struct sigaction act;
act.sa_handler = timeout;
sigemptyset(&act.sa_mask);
act.sa_flags = 0;
sigaction(SIGALRM, &act, 0);
alarm(2);
for(i=0; i<3; ++i)
{
puts("wait...");
sleep(100);
}
return 0;
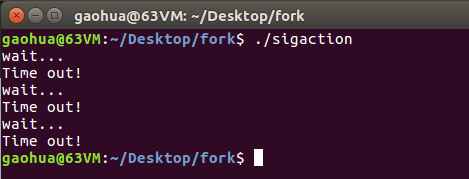
}运行结果:
5. 多进程服务器端
之前的回声服务器每次只能向1个客户端提供服务,我们使用基于多进程的并发回声服务器实现模型,
使其可以同时服务多个客户端。
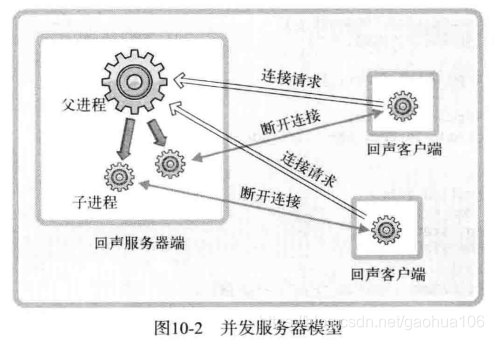
从上图可以看出,每当有客户端请求服务(连接请求)时,回声服务器端都创建子进程以提供服务。请求服务的客户端
若有5个,则创建5个子进程提供服务。为了完成这些任务,需要经过如下过程:
(1)服务器端(父进程)通过调用accept函数受理连接请求。
(2)创建子进程
(3)子进程利用创建时从父进程复制来的文件描述符提供服务
下面给出服务器端代码,可结合第4章的回声客户端运行:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <signal.h>
#include <sys/wait.h>
#include <arpa/inet.h>
#include <sys/socket.h>
#include <sys/types.h>
#define BUF_SIZE 30
void err_sys(char *message);
void read_childproc(int sig);
int main(int argc, char* argv[])
{
int serv_sock, clnt_sock;
struct sockaddr_in serv_adr, clnt_adr;
pid_t pid;
struct sigaction act;
socklen_t adr_sz;
int str_len, state;
char buf[BUF_SIZE];
if(argc != 2)
{
printf("Usage : %s <port>\n", argv[0]);
exit(1);
}
act.sa_handler = read_childproc;
sigemptyset(&act.sa_mask);
act.sa_flags = 0;
state = sigaction(SIGCHLD, &act, 0);
serv_sock = socket(PF_INET, SOCK_STREAM, 0);
memset(&serv_adr, 0, sizeof(serv_adr));
serv_adr.sin_family = AF_INET;
serv_adr.sin_addr.s_addr = htonl(INADDR_ANY);
serv_adr.sin_port = htons(atoi(argv[1]));
if(bind(serv_sock, (struct sockaddr*) &serv_adr, sizeof(serv_adr)) == -1)
err_sys("bind() error");
if(listen(serv_sock, 5) == -1)
err_sys("listen() error");
while(1)
{
adr_sz = sizeof(clnt_adr);
clnt_sock = accept(serv_sock, (struct sockaddr*)&clnt_adr, &adr_sz);
if(clnt_sock == -1)
continue;
else
puts("new client connected...");
pid = fork();
if(pid == -1)
{
close(clnt_sock);
continue;
}
if(pid == 0)
{
close(serv_sock);
while((str_len = read(clnt_sock, buf, BUF_SIZE)) != 0)
{
write(clnt_sock, buf, str_len);
}
close(clnt_sock);
puts("client disconnected...");
return 0;
}
else
close(clnt_sock);
}
close(serv_sock);
return 0;
}
void read_childproc(int sig)
{
pid_t pid;
int status;
pid = waitpid(-1, &status, WNOHANG);
printf("remove proc id: %d \n", pid);
}
void err_sys(char* message)
{
fputs(message, stderr);
fputc('\n', stderr);
exit(1);
}
运行结果:
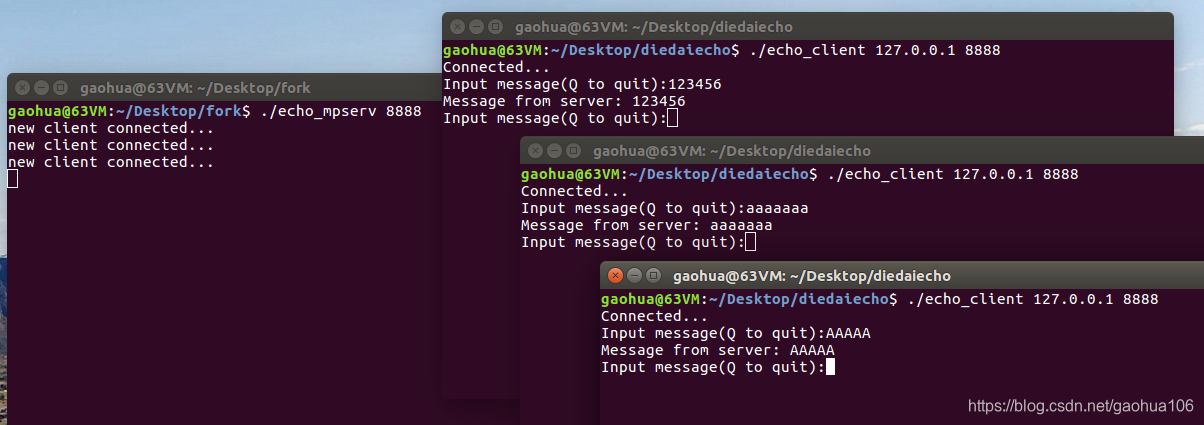
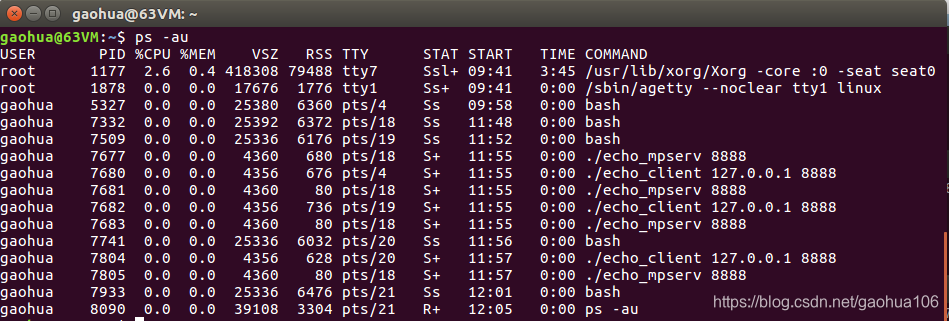
我们可以看到服务端可以同时为三个客户端提供服务,三个服务端之间也不会互相影响。
终端里执行ps -au,可以看到多个server有多个进程存在

















 377
377

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









