






 试凑法是一种基于经验的PID参数整定方法,适用于闭环控制系统。本文详细介绍了试凑法的步骤,包括比例、积分和微分控制器的调节,以及如何应对不同系统响应。通过实例分析和MATLAB模拟,阐述了如何针对特定传递函数整定参数,最终得出一个具体系统的整定参数:Kp=0.5, Ki=0.56, Kd=0.99。并提供了相关程序源码链接。"
125165514,10188108,Jmeter 分布式压力测试实战与配置详解,"['压力测试', 'Jmeter', '分布式测试']
试凑法是一种基于经验的PID参数整定方法,适用于闭环控制系统。本文详细介绍了试凑法的步骤,包括比例、积分和微分控制器的调节,以及如何应对不同系统响应。通过实例分析和MATLAB模拟,阐述了如何针对特定传递函数整定参数,最终得出一个具体系统的整定参数:Kp=0.5, Ki=0.56, Kd=0.99。并提供了相关程序源码链接。"
125165514,10188108,Jmeter 分布式压力测试实战与配置详解,"['压力测试', 'Jmeter', '分布式测试']
试凑法是一种凭借经验整定参数的方法,在闭环控制系统中,按照Kp,Ki,Kd的顺序进行调节,一边调节参数,一边观察过程,直到满足要求为止。
这个过程在工程上对初学甚至经验不是特别足的人来说是非常困难的,如果控制器简单还好,当控制器涉及到多个组合的时候就会变的十分不容易,一般而言,试凑法的调节过程为:
针对典型传递函数如:
Gc=Kp+Ki/S+KdS
叙述如下:
1、先调节Kp,使系统闭环,让积分控制和微分控制不起作用(Kd=0,Ki=0),观察系统的响应,如果响应速度快,超调量小,静态误差小,则可以直接使用比例控制器。
2、如果超调量大,增加Ki的同时调整Kp,使Kp减小(减小10%不定,因为加入了Ki积分控制会使系统稳定性下降,可以通过减小比例作用来调整),一直调节,直到满足条件。
3、如果系统动态特性不好,即可加入Kd(微分控制器),同时使Kp增大,Kp由小到大调节
调节过程需要记住的原则是:各个控制器的作用和对应的参数变化对系统的影响
1、比例环节:比例度与控制器的放大倍数的倒数成比例;控制器的比例度越小,它的放大倍数越大,偏差放大的能力越大,反之亦然。
即:比例环系数Kp越大,比例环节作用性越强,系统放大倍数越大,曲线越波动,超调增大,系统响应加快,调节时间减小,反之亦反。
2、积分环节:控制器的积分作用就是为了消除自控系统的余差而设置的。积分系数Ki越小,对应的积分作用越强,消除误差的速度越快。但不能过小,否则会出现积分饱和的现象
通过调节积分系数,可以减小甚至消除稳态误差,提高系统的控制精度,但是积分环节的引入会降低系统的稳定性。增大超调。
3、微分环节:主要是用来克服被控对象的滞后,适当的微分控制作用可以使超调量减小,增加系统的稳定性。Kd越大,微分作用越明显。
微分作用的输出变化与微分时间和偏差变化的速度成比例,微分时间越长,则微分作用的输出变化越大
工程上一般通过经验进行设计,实验中可以通过matalb获取直观的参数,下面是试凑法对系统进行PID参数整定后效果控制图
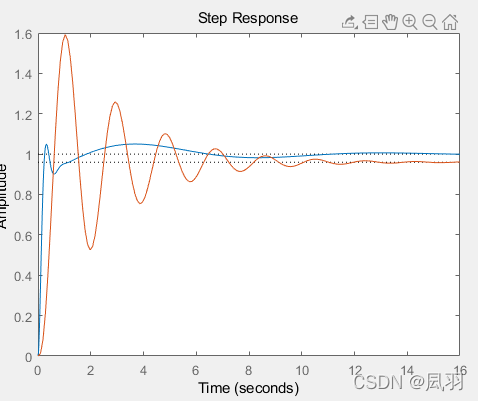
针对系统为:
G(s)=100/(S^2+3S+100)
绘制的曲线是单位阶跃曲线,初学者可以通过直接修改系统构造,得到相应的整定参数,本系统参数整定为:
Kp=0.5Ki=0.56Kd=0.99
Mp=4.9927 %ts=0.94051 Ep=5.0848%
相关程序源码放到连接了,需要的请自取:
https://download.youkuaiyun.com/download/fysf911/83098909


















 2118
2118

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











