







 本文深入探讨二分图的匹配概念,包括最大匹配和增广路径,并详细解析匈牙利算法的原理及其实现过程,旨在帮助读者理解和应用这一经典图论问题的解决方法。
本文深入探讨二分图的匹配概念,包括最大匹配和增广路径,并详细解析匈牙利算法的原理及其实现过程,旨在帮助读者理解和应用这一经典图论问题的解决方法。
一、二分图的匹配
对于一个二分图G的子图M,若M的边集E的任意两条边都不连接同一个顶点,
则称M为G的一个匹配。即:“任意两条边没有公共端点”的边的集合。
二、最大匹配
对于二分图G的一个子图M,若M为其边数最多的子图,则M为G的最大匹配。
增广路:也称增广轨或交错轨。若P是图G中【一条连通两个未匹配顶点的(长)路径】,
属于M的边和不属于M的边(已匹配和待匹配的边)在P上交替出现(一个属于一个不属于...),
则P为M的一条增广路径。(相当于是,新加入一个节点,找到它能得到匹配的修改路径,那么len++)
(即:有A、B集合,增广路由A中一个点通向B中一个点,再由B中这个点通向A中一个点……交替进行)。
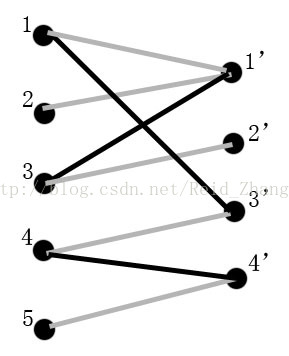
①初始状态。

当前已有边(1,1')和(4,3')属于M。
②找到一条增广路径P。

如图,增广路径P为:(3 - 1' - 1 - 3' - 4 - 4')。
其中,不属于M的路径有:(3, 1')、(1, 3')和(4, 4'),属于M的路径有(1‘, 1)和(3', 4)。
显然,在上面的路径P中,不属于M的路径和属于M的路径是交替出现的。
即:[3-1'(蓝), 1'-1(黑), 1-3'(蓝), 3'-4(黑), 4-4'(蓝)]。
③对第②步中的图进行取反。
将原来属于M的路径去除,将原来不属于M的路径加入M中。
即:蓝色的边变成黑色,黑色的边变成蓝色。

④增广路更新匹配完成。
由增广路的定义我们可以推出下述三个结论:
- P的路径长度必定为奇数,交替的第一条边和最后一条边都不属于M。
- 如果有增广路径,经过【取反操作】可以得到更大的匹配M’,边数为M的边数+1。
-
M为G的最大匹配当且仅当【不存在】相对于M的【增广路径】。
三、匈牙利算法
1、算法描述
建立有向图G,分为二分图的左侧和右侧。
优先选择左侧序号更小的、连接可能的边。
对于两个点的目标点“冲突”的时候,采取“协商”的办法。
即序号小的连接可能连接的另一条边。
若“协商”失败,则序号较大的点放弃这条边,继续寻找。
具体情况如下:
1)如果(左侧)后来的和以前的发生矛盾,则以前的优先退让。
2)如果以前的退让之后没有连边,则以前的拒绝退让,新来的去寻找下一个匹配。
3)如果新来的谁也匹配不上了,那放弃这个新来的节点。
- 注意:根据交叉路原理容易证明每一条增广路的起点和终点分属不同点集。
- 因为如果从偶数次所到位置的下一次走匹配边,意味着找不到选择点。
- 所以左右是对称的,每次找增广路时都可以直接从左边的节点开始dfs。
2、代码实现
#include<iostream>
#include<cstdio>
#include<cstring>
#include<algorithm>
#include<queue>
#include<string>
#include<cmath>
using namespace std;
typedef long long ll;
/*【洛谷p3386】二分图匹配
给定一个二分图,结点个数分别为n,m,边数为e,求二分图最大匹配数。 */
void reads(int &x){ //读入优化(正负整数)
int fx=1;x=0;char s=getchar();
while(s<'0'||s>'9'){if(s=='-')fx=-1;s=getchar();}
while(s>='0'&&s<='9'){x=x*10+s-'0';s=getchar();}
x*=fx; //正负号
}
const int N=5000019;
int n,m,num_e,x,y,ans=0,tot=0;
int match[N],head[N]; bool vis[N];
struct node{ int ver,nextt; }e[N];
void add(int x,int y){
e[++tot].ver=y; e[tot].nextt=head[x]; head[x]=tot;
}
bool dfs(int x){
for(int i=head[x];i;i=e[i].nextt) //寻找连边
if(!vis[e[i].ver]){ //当前右节点在新左节点的匹配中未访问过
vis[e[i].ver]=true; //标记这个非匹配点
if(!match[e[i].ver]||dfs(match[e[i].ver])){ //如果原匹配的点可以让位
match[e[i].ver]=x; return true; //左节点x可以占用这个右节点y
}
} return false;
}
int main(){
reads(n),reads(m),reads(num_e);
for(int i=1;i<=num_e;i++){
reads(x),reads(y); //↓判断是否在范围内
if(x>=1&&y>=1&&x<=n&&y<=m) add(x,y); //连边
} for(int i=1;i<=n;i++) //寻找加入左侧每个节点时会不会有路径更新
memset(vis,false,sizeof(vis)),ans+=dfs(i); //计算最大匹配边数
printf("%d\n",ans); return 0;
}
四、完备匹配和多重匹配
【二分图的完备匹配】两侧节点一一对应。
- 二分图左右节点数相同,均为n个。且最大匹配包含n条匹配边。
【二分图的多重匹配】多重最大匹配 与 多重最优匹配。
- 二分图匹配中一个点可以和多条匹配边相关联,但有上限。
- 即:Li表示点i最多可以和多少条匹配边相关联。
——时间划过风的轨迹,那个少年,还在等你。

















 990
990

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









