







 本文详细介绍了小孔成像的原理,强调了光心、焦距和成像平面的概念,并探讨了相机坐标系的转换过程。通过世界坐标系、相机坐标系和图像坐标系之间的转换,阐述了如何利用多个物点和像点坐标求解成像参数。该内容对理解光学成像和计算机视觉有重要帮助。
本文详细介绍了小孔成像的原理,强调了光心、焦距和成像平面的概念,并探讨了相机坐标系的转换过程。通过世界坐标系、相机坐标系和图像坐标系之间的转换,阐述了如何利用多个物点和像点坐标求解成像参数。该内容对理解光学成像和计算机视觉有重要帮助。
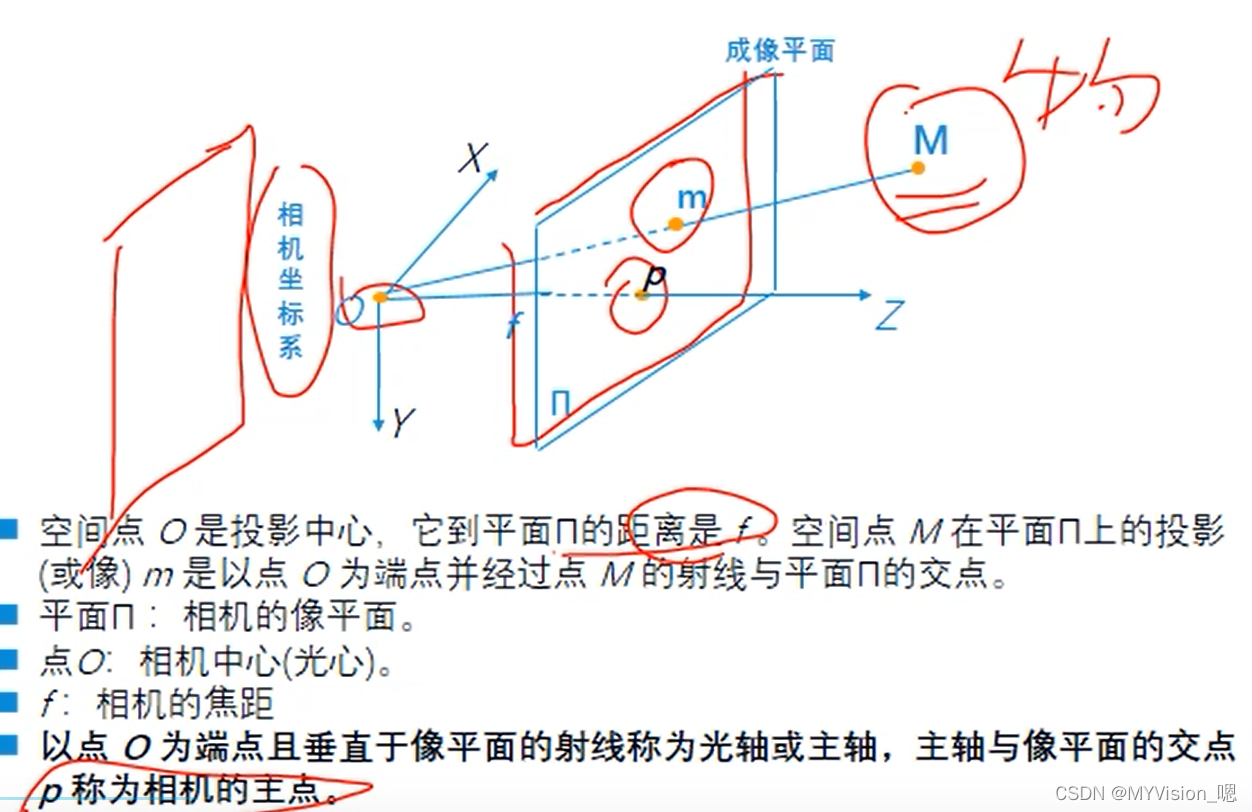
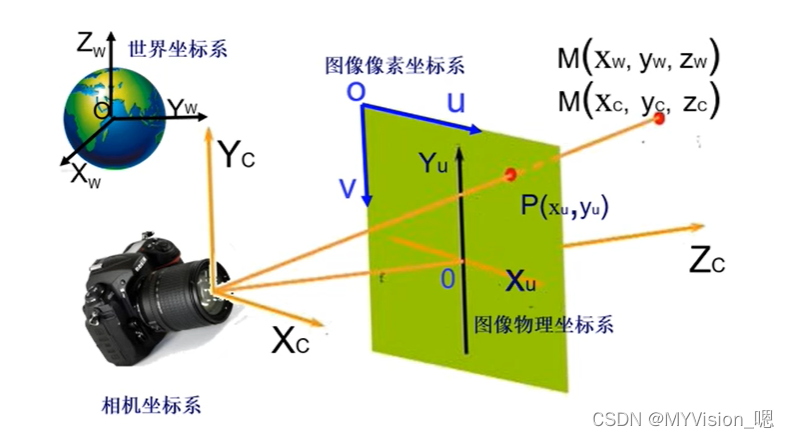
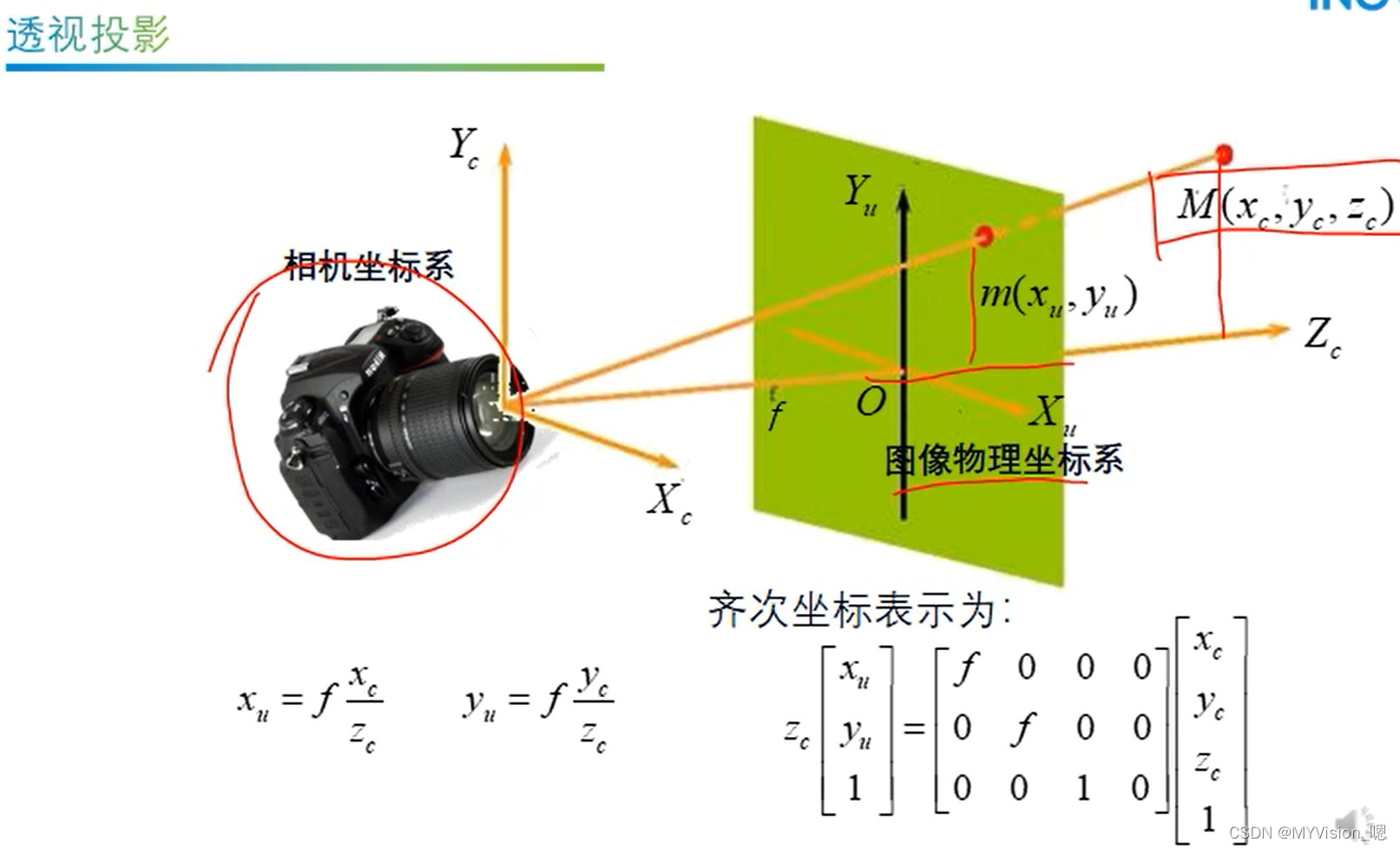
1. 小孔成像原理
- O 是光心,也叫投影中心,其实就是小孔成像中的那个小孔
- 实际成像平面是在光心的后面,图上画的成像平面是跟实际成像平面对称的虚像
- OZ 是坐标系统的Z轴,与成像平面的交点P 叫做相机的主点
- OP的长度是焦距f
- 成像平面其实就是相机的靶面
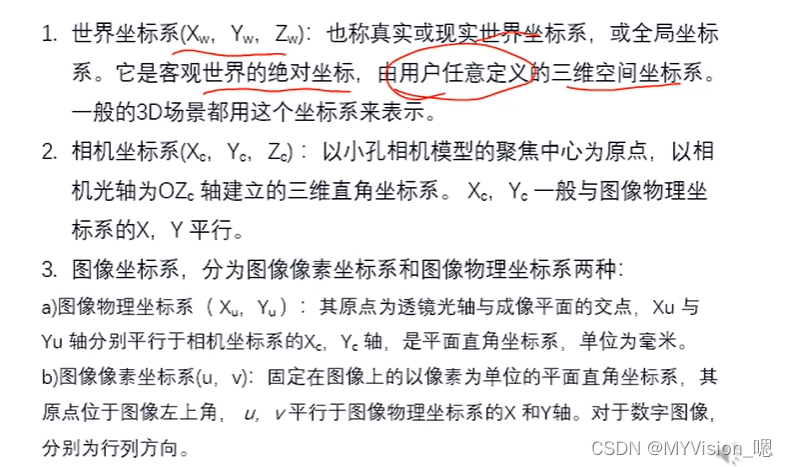
常用坐标系
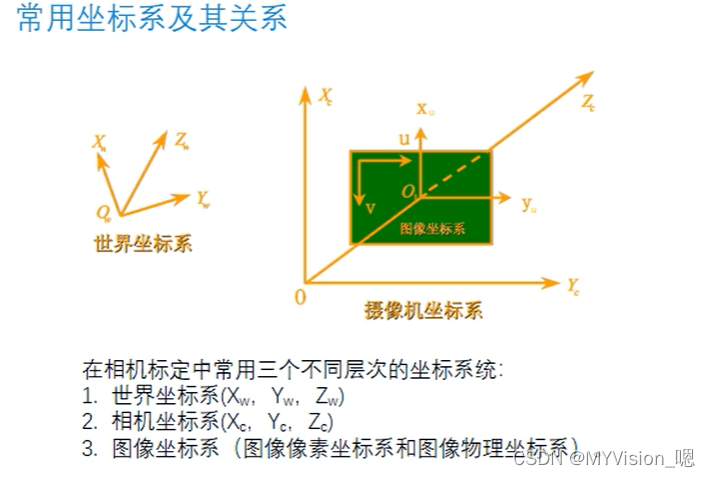
- 世界坐标系:原点可以随便选,可以是电脑,桌子,等环境中的物体
- 相机坐标系:原点在光心
- 图像坐标系:
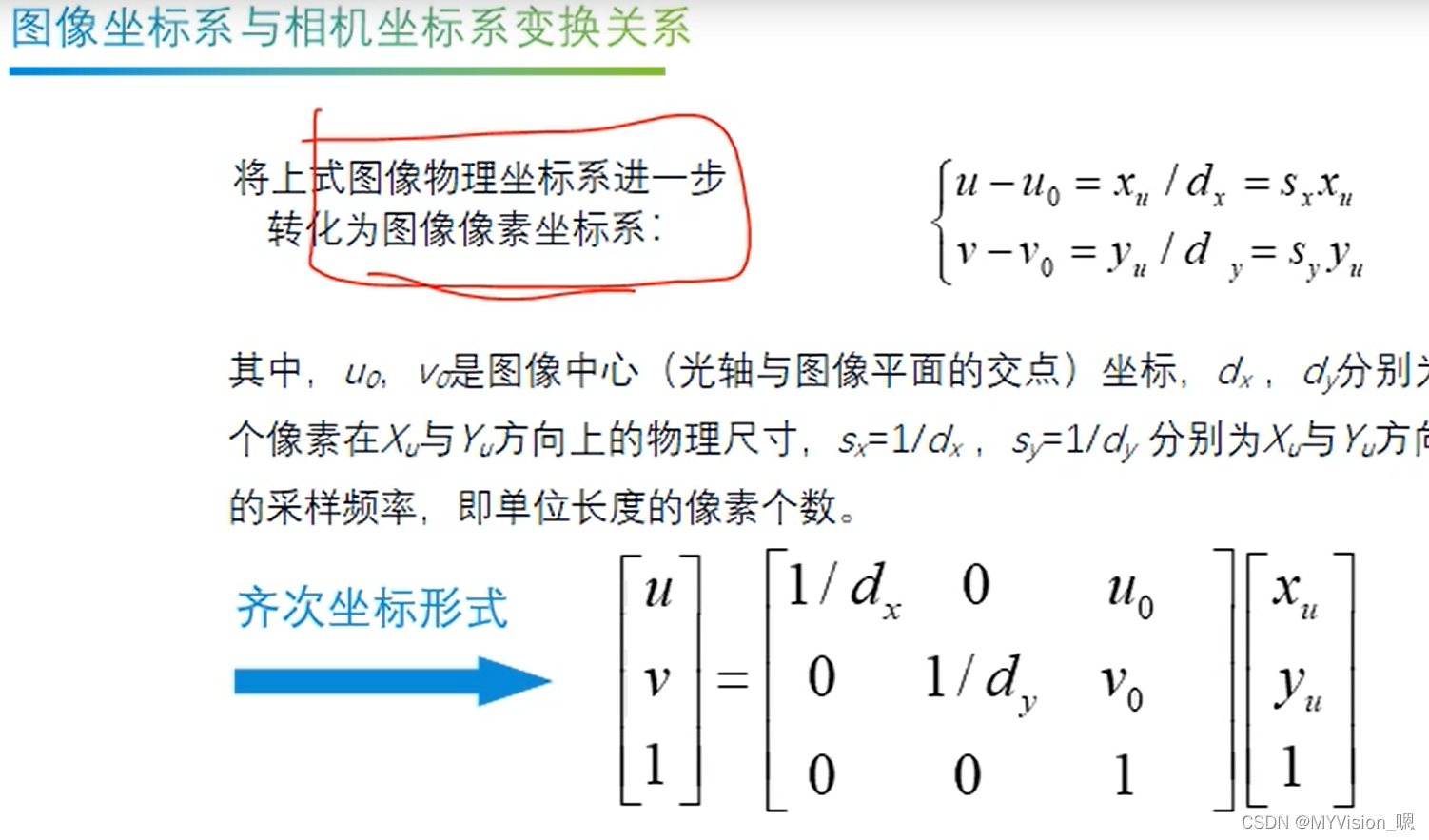
- 图像物理坐标系
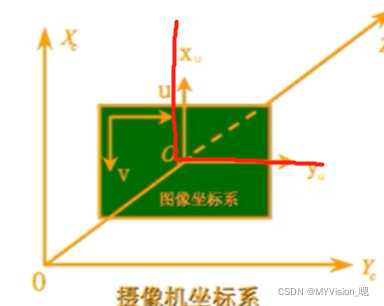
- 图像像素坐标系
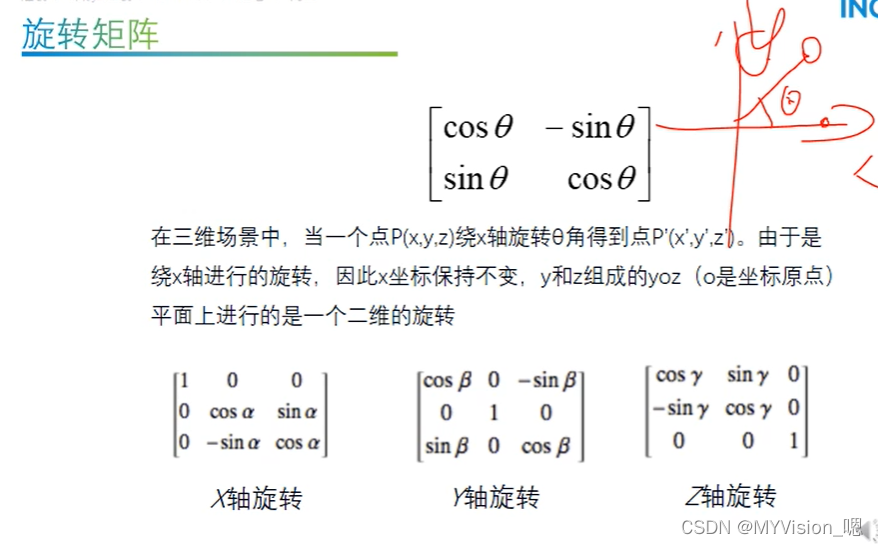
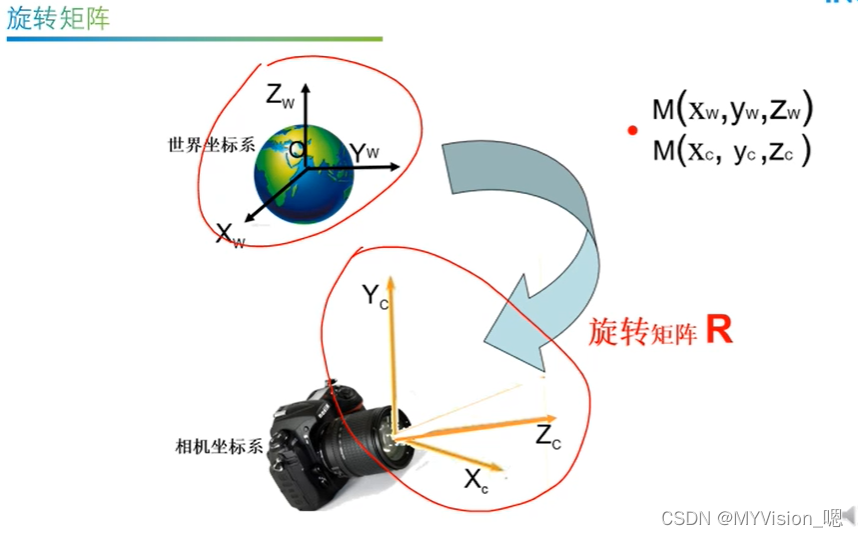
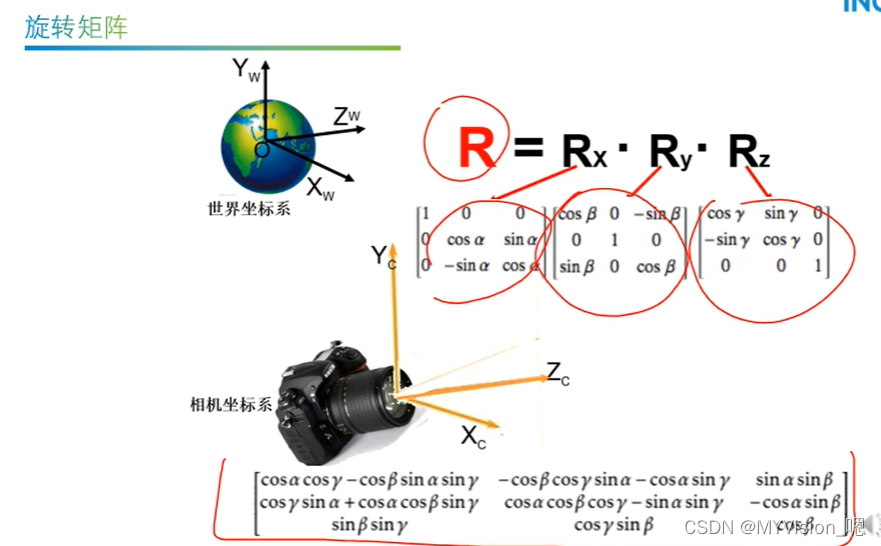
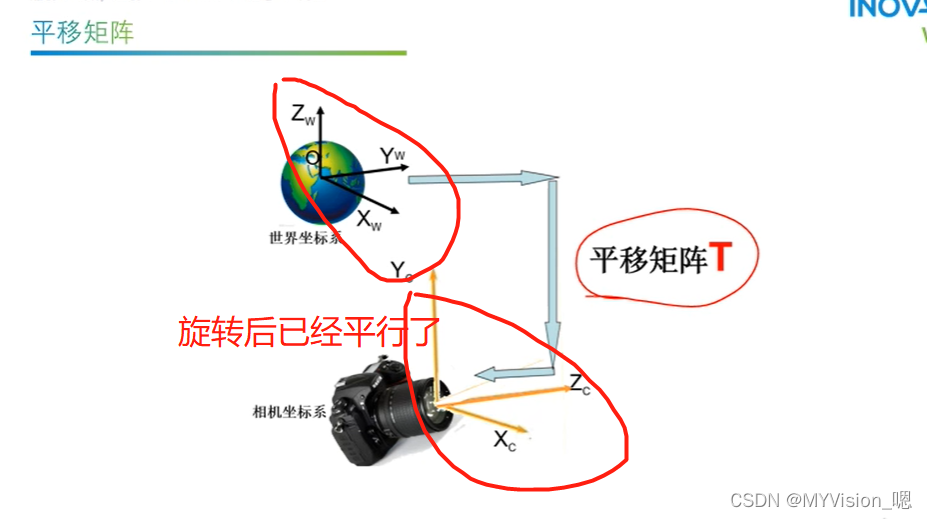
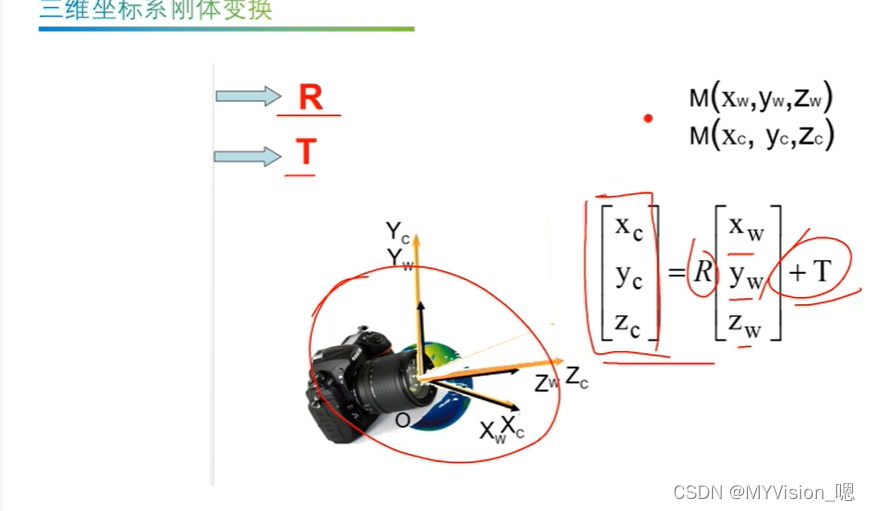
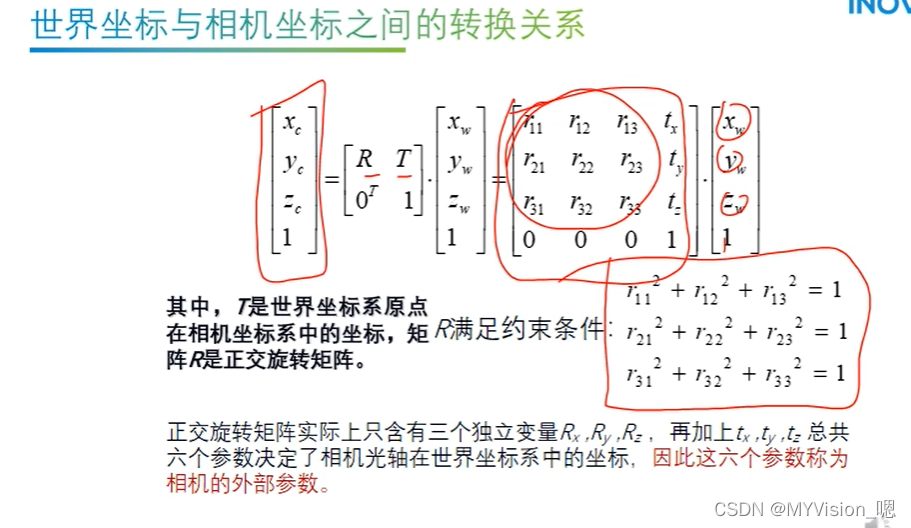
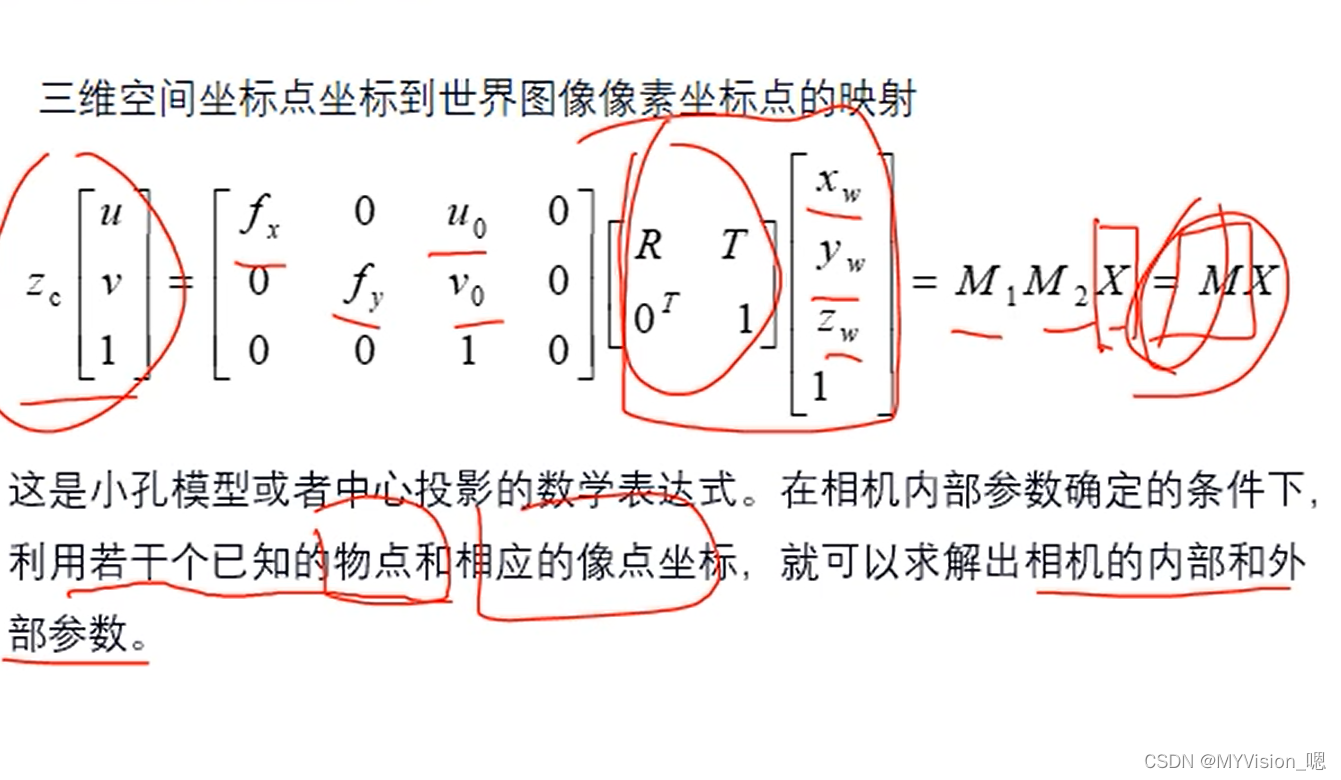
第一步:把世界坐标系坐标转换到相机坐标系坐标,让世界坐标系旋转一下,跟相机坐标系平行
- 图像物理坐标系
-
-
因为有10个未知参数,所以需要多个物点的坐标和对应的像点坐标,就可以求解出来(最少4个点)


















 3454
3454

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









