







 本文介绍了如何使用PostGIS中的ST_BUFFER、ST_ConcaveHull和ST_Collect函数获取点或线数据集的外包多边形,包括最小外包凸多边形、缓冲区操作和合并线点数据的方法,并讨论了选择参数的重要性。
本文介绍了如何使用PostGIS中的ST_BUFFER、ST_ConcaveHull和ST_Collect函数获取点或线数据集的外包多边形,包括最小外包凸多边形、缓冲区操作和合并线点数据的方法,并讨论了选择参数的重要性。
概述
存在点(或线)数据集,其分布情况如下:

现在想要获取该数据的几个外包多边形,主要包含如下三个方法:
方法一
第一种方法,最小外包凸多边形,其结果如下:
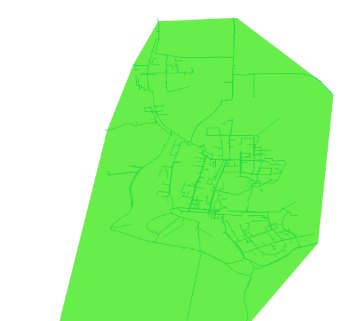
查询语句:ST_ConcaveHull(ST_Collect(geom::geometry),0.2)
方法二
第二种方法,最小外包多边形进行缓冲区:
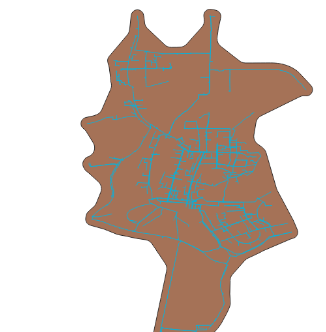
查询语句:ST_BUFFER(ST_BUFFER(ST_ConcaveHull(ST_Collect(geom::geometry),0.001,true),0.0011),-0.0001)
方法三
第三种方法,所有线或者点数据进行缓冲区后取并集:

总结
核心是利用ST_BUFFER、ST_Collect、ST_ConcaveHull三个方法,找到合适的参数。
参考
ST_BUFFER详见https://postgis.net/docs/ST_Buffer.html
ST_ConcaveHull详见https://postgis.net/docs/ST_ConcaveHull.html
ST_Collect详见https://postgis.net/docs/ST_Collect.html



















 491
491

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











