




1.TMC2209封装
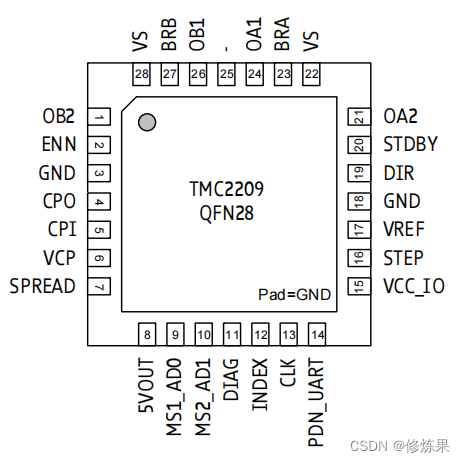
2.TMC2209引脚定义
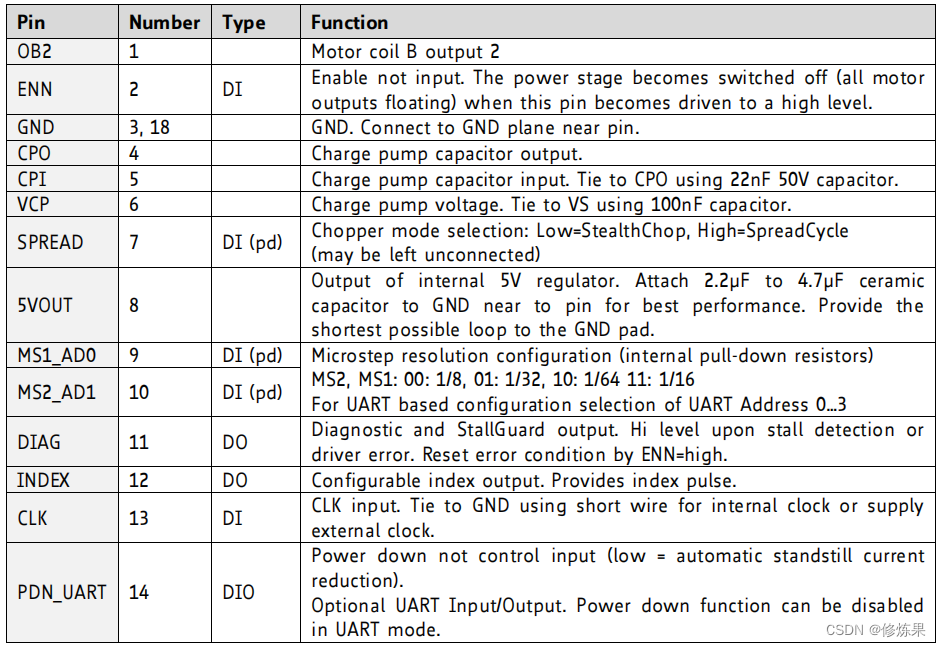
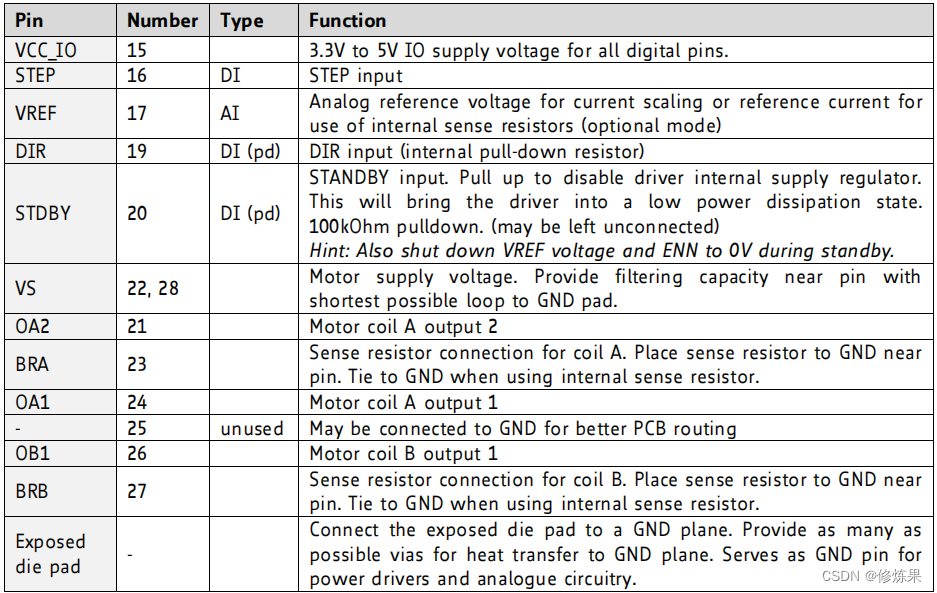
3.配置引脚详解
TMC2209提供了四个配置引脚:
- PDN_UART引脚
- MS1引脚
- MS2引脚
- SPREAD引脚
这些引脚允许快速配置的独立操作。在UART模式下,可以禁用配置引脚,以便通过寄存器设置不同的配置。
| PDN_UART引脚: 电机停转时开启电机断电的配置 | |
|---|---|
| PDN_UART | 配置效果 |
| GND | 在电机静止期间,给电机自动断电 |
| VCC_IO | 使不能运转 |
| UART接口 | 使用UART接口时,应通过GCONF.pdn_disable=1禁用配置引脚。在电机停转期间需要通过编程设置IHOLD |
| MS1/MS2引脚: 对步进电机输入的微步进行分辨率配置 | ||
|---|---|---|
| MS1 | MS2 | 微步设置 |
| GND | GND | 8细分 |
| GND | VCC_IO | 32细分 |
| VCC_IO | GND | 64细分 |
| VCC_IO | VCC_IO | 16细分 |
| SPREAD引脚: 斩波器模式的选择 | |
|---|---|
| SPREAD | 斩波设置 |
| GND or Pin open/ not available | 选择了StealthChop方式。当 引脚为低电平,启用了低分辨率微步细分模式,如 16 微步或 32 微步。低分辨率微步可以降低电流纹波,减少噪音和功耗,但可能会牺牲一定的运动平滑性和精度。 |
| VCC_IO | 当 spread 引脚为高电平时启用了高分辨率微步细分模式,可以提供更高的微步分辨率,如 256 微步或更高的微步数。高分辨率微步可以提供更平滑的运动和更精确的位置控制,但可能会导致较高的电流纹波。 |
4. 原理图示例
4.1.大部分TMC2209驱动电路设计图
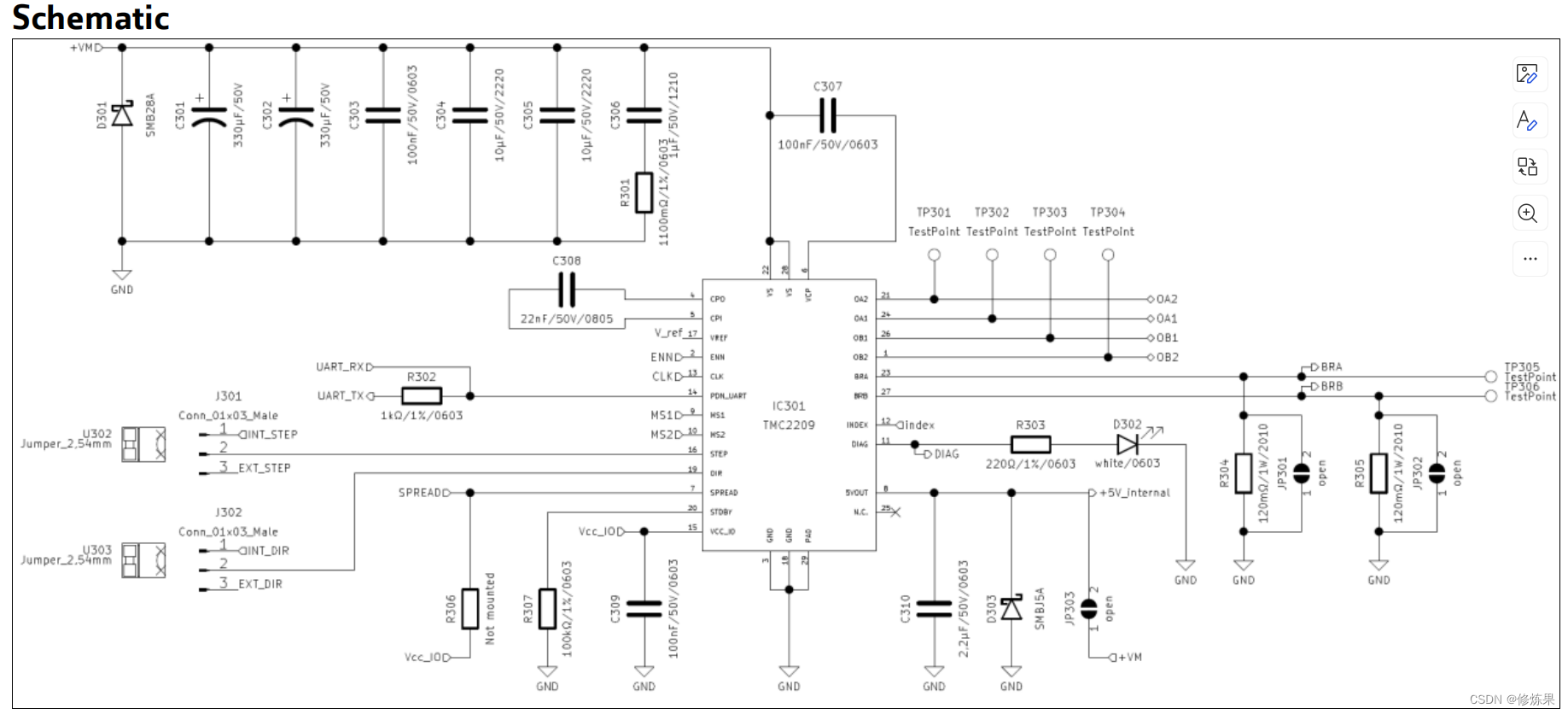
4.2 接法(结合第4.1节看)
- EN:接GND, 电机才能工作。
- OA2\OA2\OB1\OB2: 接2项步进电机的A相±,B相±。
- VS(VM):给电机的电压(4.75—>28VDC)。
- VCC_IO (VDD):3.3V to 5V供电电压给TMC2209。
- CLK:连接时钟。
- STEP:脉冲输入。
- DIR:电机方向。
- DIAG:触发报警,当堵转后会发送一个脉冲给单片机,控制器收到后控制其停下。
- VCP/VREF:电流限制、电压比较器反馈或振荡器输出。
- INDEX:给出步进电机位置的信号。

















 1054
1054

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









