



 该教程详细介绍了如何使用STM32微控制器通过中断控制LED灯。首先在bsp_led.h和bsp_led.c中初始化LED的GPIO,然后配置中断线路,包括EXTI和NVIC设置,使得KEY1上沿触发蓝灯亮灭,KEY2下降沿触发绿灯亮灭。编程过程涉及GPIO_Init、EXTI_Init和NVIC_Init等函数。在stm32f10x_it.c中编写中断服务函数,实现中断响应。
该教程详细介绍了如何使用STM32微控制器通过中断控制LED灯。首先在bsp_led.h和bsp_led.c中初始化LED的GPIO,然后配置中断线路,包括EXTI和NVIC设置,使得KEY1上沿触发蓝灯亮灭,KEY2下降沿触发绿灯亮灭。编程过程涉及GPIO_Init、EXTI_Init和NVIC_Init等函数。在stm32f10x_it.c中编写中断服务函数,实现中断响应。
教程是通过设定外设KYE1的上沿输入为中断申请,进而通过KEY1控制LED灯的亮暗。
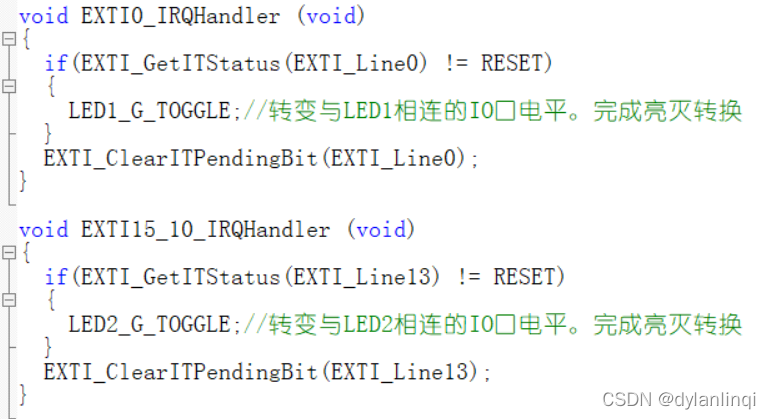
根据老师的教学,以下为本人设计的通过KEY1的上沿输入触发亮灭蓝灯,KEY2的下降沿输入触发亮灭绿灯的编程演示。
一、初始化GPIO
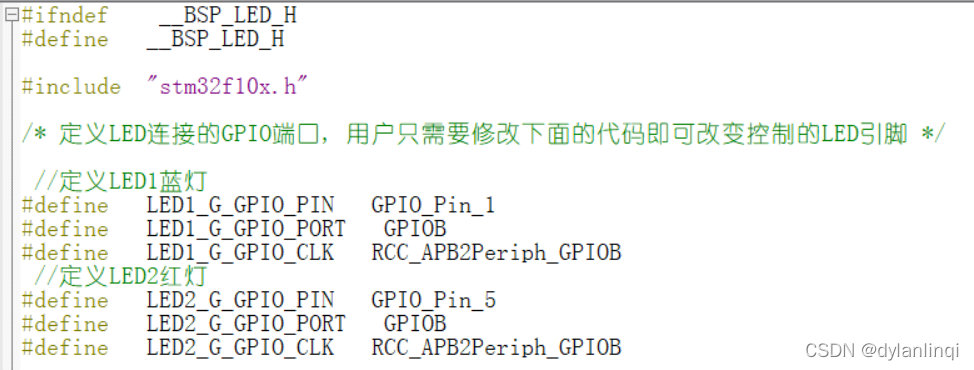
1、首先创建bsp_led.h头函数,宏定义与LED相连的GPIO口。
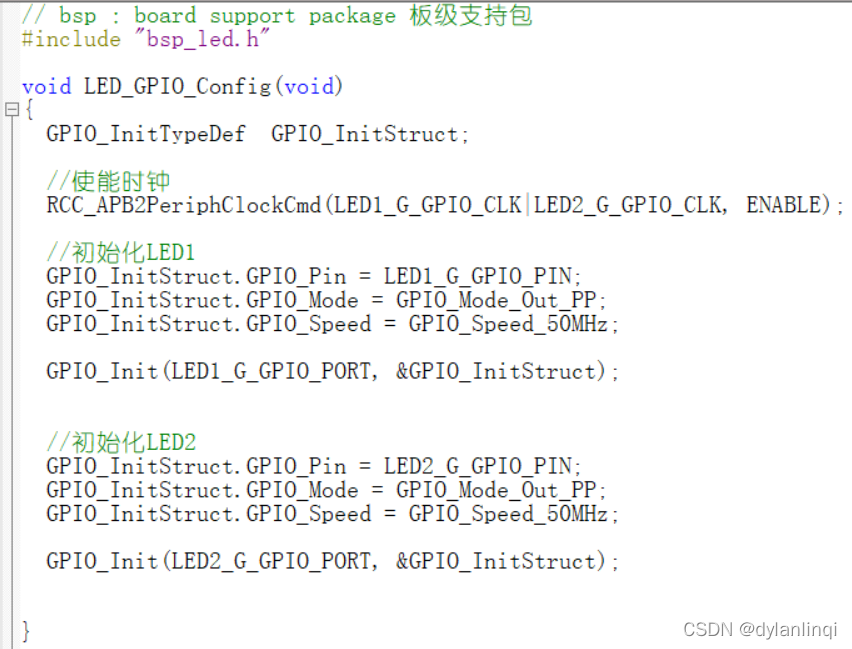
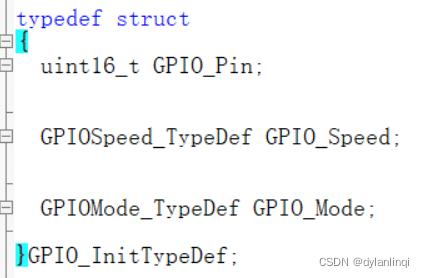
2、创建bsp_led.c,通过结构体GPIO_InitTypeDef与GPIO_Init库函数进行GPIO的初始化
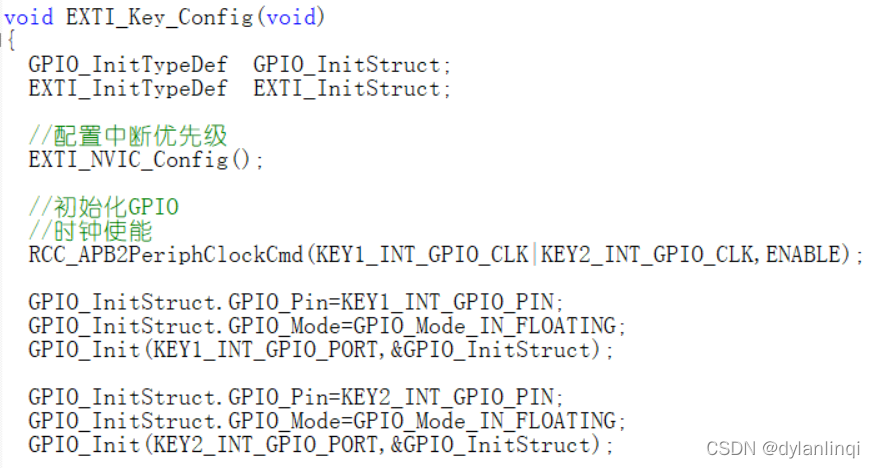
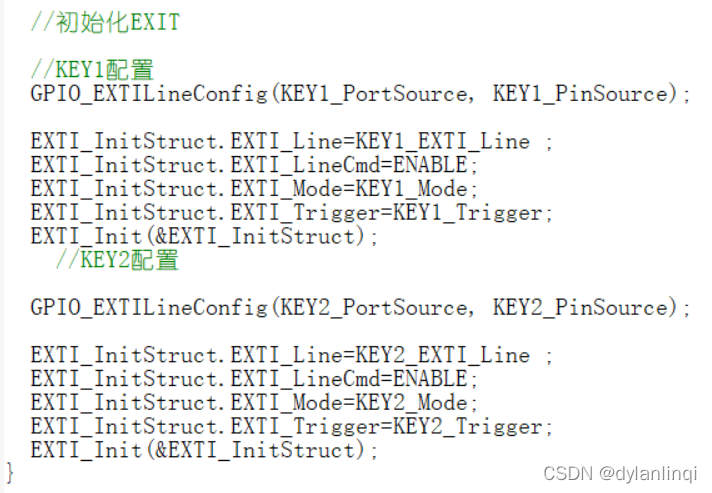
二、初始化对中段路线GPIO、EXTI、NVIC,完成中断信号从GPIO-->EXTI-->NVIC的路线连接
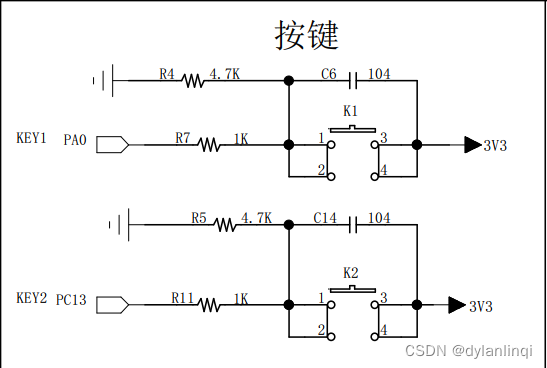
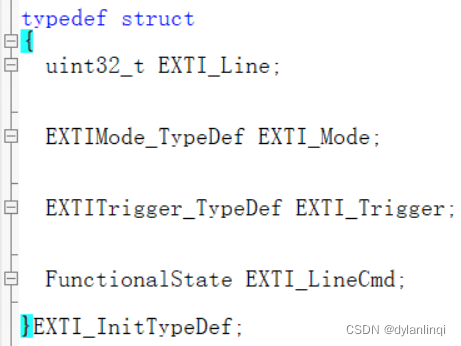
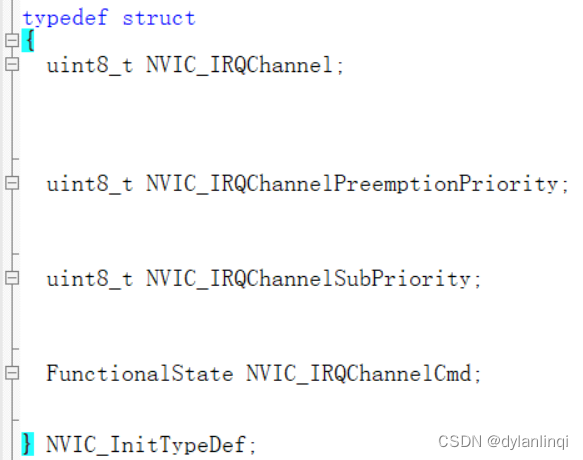
1、先查开发板原理图,需要运用结构体NVIC_InitTypeDef、GPIO_InitTypeDef、EXTI_InitTypeDef以及库函数(GPIO_Init、EXTI_Init、NVIC_Init),其详细配置信息需查询头文件stm32f10x_exti.h。
2、创建bsp_exti.h进行宏定义
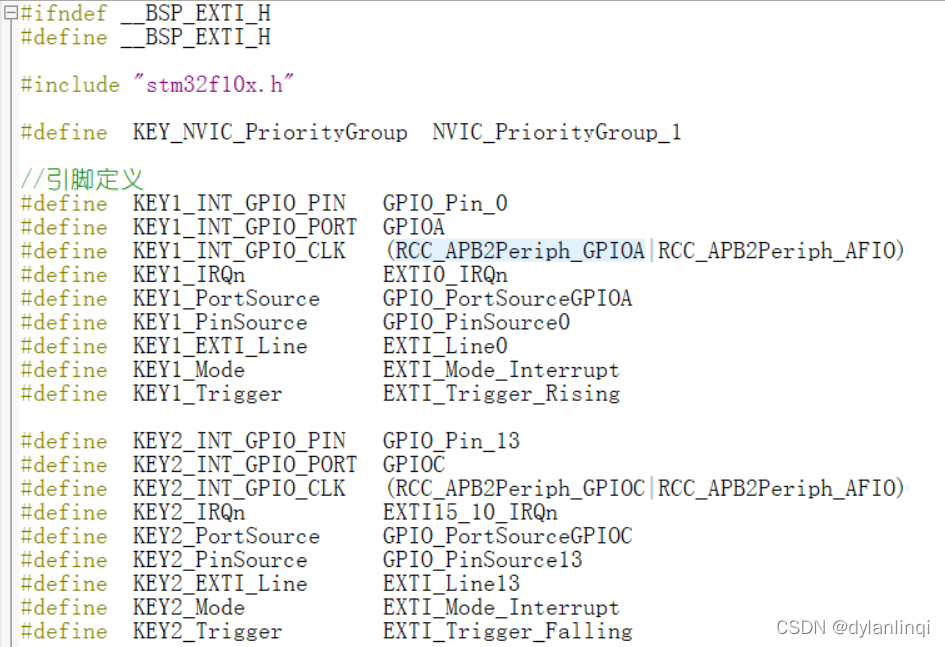
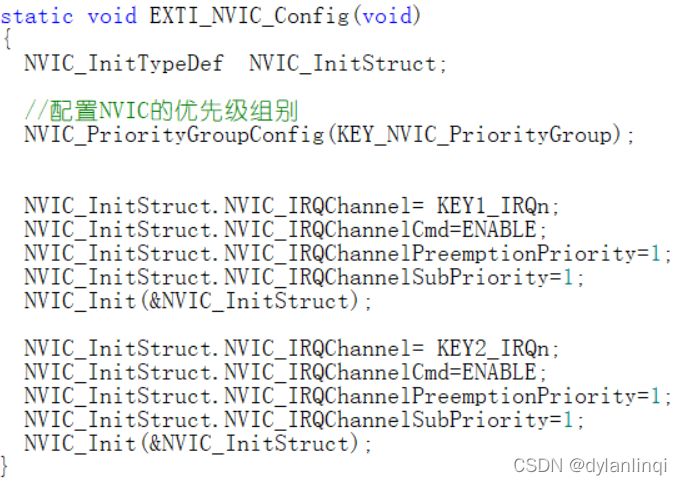
3、创建 bsp_exti.c进行初始化编程
三、在stm32f10x_it,c文件中编写中断函数
编程完成。

















 5579
5579

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









