003.LeetCode:70. 爬楼梯
最新推荐文章于 2025-04-23 11:37:17 发布





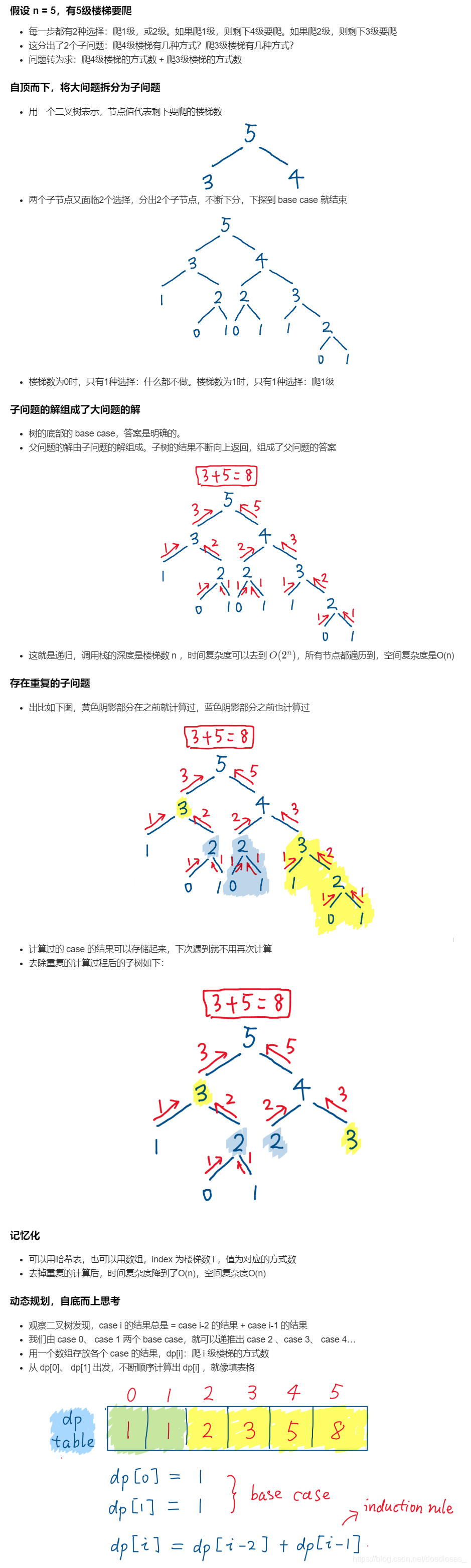
 本文介绍了一个经典的动态规划问题——爬楼梯。通过使用动态规划的方法,我们提供了一个简洁的C++代码实现,用于计算爬上n阶楼梯的不同方式数量。代码中定义了一个Solution类,其中包含一个climbStairs成员函数,该函数使用了动态规划的思想,利用一个vector存储中间结果,避免了重复计算。
本文介绍了一个经典的动态规划问题——爬楼梯。通过使用动态规划的方法,我们提供了一个简洁的C++代码实现,用于计算爬上n阶楼梯的不同方式数量。代码中定义了一个Solution类,其中包含一个climbStairs成员函数,该函数使用了动态规划的思想,利用一个vector存储中间结果,避免了重复计算。
本文介绍了一个经典的动态规划问题——爬楼梯。通过使用动态规划的方法,我们提供了一个简洁的C++代码实现,用于计算爬上n阶楼梯的不同方式数量。代码中定义了一个Solution类,其中包含一个climbStairs成员函数,该函数使用了动态规划的思想,利用一个vector存储中间结果,避免了重复计算。
本文介绍了一个经典的动态规划问题——爬楼梯。通过使用动态规划的方法,我们提供了一个简洁的C++代码实现,用于计算爬上n阶楼梯的不同方式数量。代码中定义了一个Solution类,其中包含一个climbStairs成员函数,该函数使用了动态规划的思想,利用一个vector存储中间结果,避免了重复计算。
 3633
510
3633
510

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言