 PointNet++详解:层次特征学习与不均匀采样密度处理
PointNet++详解:层次特征学习与不均匀采样密度处理





 PointNet++是对PointNet的改进,主要解决了PointNet在提取局部特征方面的不足,增强了对细节模式的理解。它采用了分层结构,通过多次下采样和局部区域操作来捕获局部信息。此外,为了解决点云密度不均匀问题,PointNet++引入了多尺度分组策略(MSG和MRG),提高了特征学习的鲁棒性。在ModelNet40分类任务中,PointNet++表现优秀,验证了其有效性和适应性。
PointNet++是对PointNet的改进,主要解决了PointNet在提取局部特征方面的不足,增强了对细节模式的理解。它采用了分层结构,通过多次下采样和局部区域操作来捕获局部信息。此外,为了解决点云密度不均匀问题,PointNet++引入了多尺度分组策略(MSG和MRG),提高了特征学习的鲁棒性。在ModelNet40分类任务中,PointNet++表现优秀,验证了其有效性和适应性。
PointNet++[1]作为PointNet[2]的续作,着重于解决PointNet[2]没有能够很好的提取局部特征的问题,限制了其对细节图案(fine-grained patterns)的理解,无法泛化至其他复杂的任务场景。通过设计一种层级式(Hierarchical)的结构,对输入点云进行分块,重复使用PointNet[2]结构以增加对局部信息的获取能力。
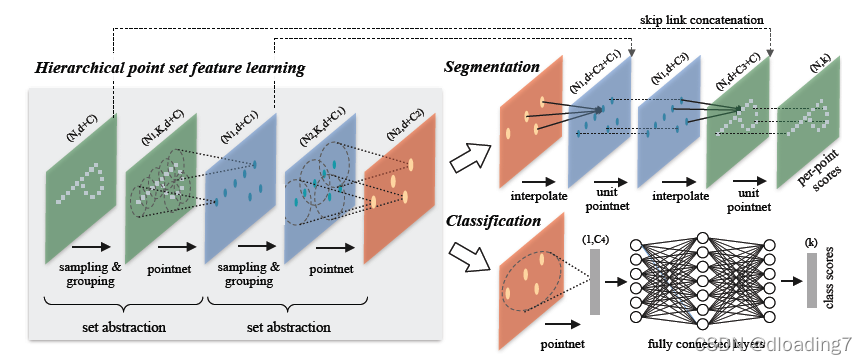
整体的网络架构如上图所示,流程相对简洁,对于输入点云,设计一种层级式架构进行特征提取。
Hierarchical Point Set Feature Learning
PointNet[2]使用MLP+Pooling operation对整体输入点云进行一次性特征描述,并没有能够较好的做到细节部分的处理,因此PointNet++[1]采用层级聚合式操作不断扩大感知区域。
如上图左侧所示,这里只以分类网络为例,首先通过FPS最远点采样进行下采样,采样点即为centroids,接着进行ball query操作以生成局部球形领域,接着使用PointNet[2]也即MLP操作进行特征升维操作。以上操作进行2次,第三次时直接对剩下的所有点进行MLP+Maxpooling操作得到global vectors,接着再使用MLP生成对应的分类概率即可。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1837
1837

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









