




 本文介绍了奇异值分解(SVD)的基本原理及其在图像降维中的应用,同时探讨了图像处理中的开闭运算,包括腐蚀和膨胀,以及在消除噪声和平滑边界方面的效果。此外,还展示了使用OpenCV进行条形码检测的实际代码和运行结果。
本文介绍了奇异值分解(SVD)的基本原理及其在图像降维中的应用,同时探讨了图像处理中的开闭运算,包括腐蚀和膨胀,以及在消除噪声和平滑边界方面的效果。此外,还展示了使用OpenCV进行条形码检测的实际代码和运行结果。
一、理论基础
①奇异值分解(SVD)原理与在降维中的应用
转自:奇异值分解(SVD)原理与在降维中的应用 - 刘建平Pinard - 博客园
奇异值分解
奇异值分解(SVD)是在机器学习领域广泛应用的算法,它不光可以用于降维算法中的特征分解,还可以用于推荐系统,以及自然语言处理等领域。是很多机器学习算法的基石。
SVD的定义
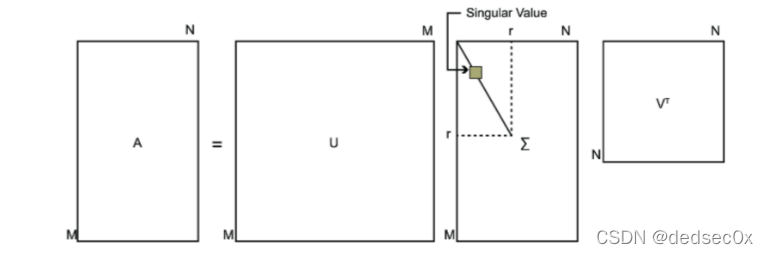
SVD也是对矩阵进行分解,但是和特征分解不同,SVD并不要求要分解的矩阵为方阵。假设我们的矩阵A是一个m×n的矩阵,那么我们定义矩阵A的SVD为:
A=UΣVT
其中U是一个m×m的矩阵,Σ是一个m×n的矩阵,除了主对角线上的元素以外全为0,主对角线上的每个元素都称为奇异值,V是一个n×n的矩阵。U和V都是酉矩阵,即满足UTU=I,VTV=I。下图可以很形象的看出上面SVD的定义:
那么我们如何求出SVD分解后的U,Σ,V这三个矩阵呢?
如果我们将A的转置和A做矩阵乘法,那么会得到n×n的一个方阵ATA。既然ATA是方阵,那么我们就可以进行特征分解,得到的特征值和特征向量满足下式:
(ATA)vi=λivi
这样我们就可以得到矩阵ATA的n个特征值和对应的n个特征向量v了。将ATA的所有特征向量张成一个n×n的矩阵V,就是我们SVD公式里面的V矩阵了。一般我们将V中的每个特征向量叫做A的右奇异向量。如果我们将A和A的转置做矩阵乘法,那么会得到m×m的一个方阵AAT。既然AAT是方阵,那么我们就可以进行特征分解,得到的特征值和特征向量满足下式:
(AAT)ui=λiui
这样我们就可以得到矩阵AAT的m个特征值和对应的m个特征向量u了。将AAT的所有特征向量张成一个m×m的矩阵U,就是我们SVD公式里面的U矩阵了。一般我们将U中的每个特征向量叫做A的左奇异向量。U和V我们都求出来了,现在就剩下奇异值矩阵Σ没有求出了。由于Σ除了对角线上是奇异值其他位置都是0,那我们只需要求出每个奇异值σ就可以了。
我们注意到:
A=UΣVT⇒AV=UΣVTV⇒AV=UΣ⇒Avi=σiui⇒σi=Avi/ui
这样我们可以求出我们的每个奇异值,进而求出奇异值矩阵Σ。上面还有一个问题没有讲,就是我们说ATA的特征向量组成的就是我们SVD中的V矩阵,而AAT的特征向量组成的就是我们SVD中的U矩阵,这有什么根据吗?这个其实很容易证明,我们以V矩阵的证明为例。
A=UΣVT⇒AT=VΣTUT⇒ATA=VΣTUTUΣVT=VΣ2VT
上式证明使用了:UTU=I,ΣTΣ=Σ2。
可以看出ATA的特征向量组成的的确就是我们SVD中的V矩阵。类似的方法可以得到AAT的特征向量组成的就是我们SVD中的U矩阵。进一步我们还可以看出我们的特征值矩阵等于奇异值矩阵的平方,也就是说特征值和奇异值满足如下关系:
σi=λi−−√
这样也就是说,我们可以不用σi=Avi/ui来计算奇异值,也可以通过求出ATA的特征值取平方根来求奇异值。
②图像的开闭运算(腐蚀-膨胀)
摘自:图像的腐蚀(erode)和膨胀(dilate) 开运算以及闭运算 - MATLAB论坛 - 数学建模社区-数学中国
腐蚀和膨胀是数学形态学上的名词,如果用于图像处理上则就称为图像二值形态学。形态学主要是为了获取物体的拓扑和结构信息,通过物体和结构元素相互作用的某些运算,得到物体更本质的形态。当形态学运用到图像处理中,它的主要作用是利用形态学的基本运算,如腐蚀和膨胀运算,对图像进行观察和处理,从而达到改善图像质量的目地;描述和定义图像的各种几何参数和特征
腐蚀的具体操作:用一个结构元素(也可以说成操作数矩阵)一般为3×3大小的,也可以看成一个卷积模板,它们的区别就在于卷积模板是以算术运算为基础的,而结构元素是以集合运算为基础的,扫描图像中的每一个像素(关于图像边缘的处理见下面详细分析),用操作数矩阵扫描图像中的每一个像素,操作数矩阵中每一个像素与覆盖的像素做“与”操作,如
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2582
2582

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









