







 本文介绍了透视投影的概念及其在现实生活中的表现,详细讲述了透视投影如何通过PCL库在OpenGL中模拟,包括相应的代码实现和效果展示。
本文介绍了透视投影的概念及其在现实生活中的表现,详细讲述了透视投影如何通过PCL库在OpenGL中模拟,包括相应的代码实现和效果展示。
一、简介
在现实生活中,我们总会注意到离我们越远的东西看起来更小。这个神奇的效果被称之为透视(Perspective)。透视的效果在我们看一条无限长的高速公路或铁路时尤其明显,正如下面图片显示的这样:
由于透视的原因,平行线似乎在很远的地方看起来会相交。这正是透视投影(Perspective Projection)想要模仿的效果,它是使用透视投影矩阵来完成的。这个投影矩阵不仅将给定的平截头体范围映射到裁剪空间,同样还修改了每个顶点坐标(齐次坐标,x,y,z,w,其中w为尺度系数)的w值,从而使得离观察者越远的顶点坐标w分量越大。如下图所示:
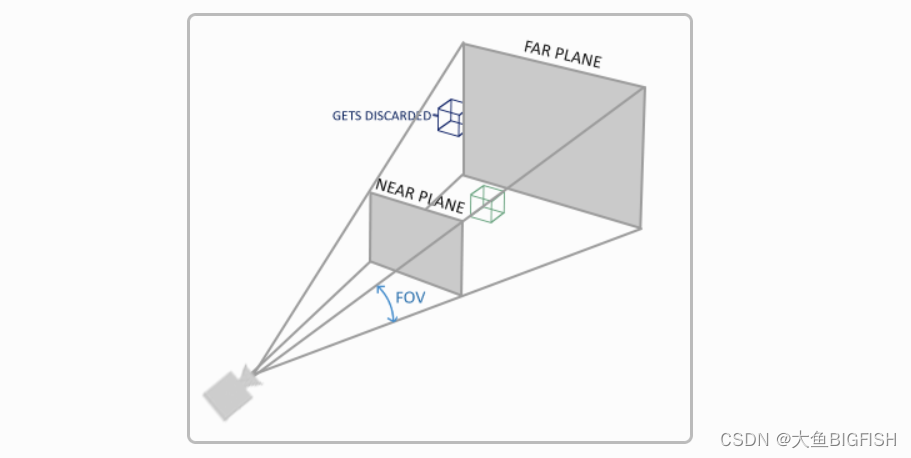
被转换到裁剪空间的坐标都会在-w到w的范围之间(任何大于这个范围的对象都会被裁剪掉)。OpenGL要求所有可见的坐标都落在-1.0到1.0范围内从而作为最后的顶点着色器输出,因此一旦坐标在裁剪空间内,透视划分就会被应用到裁剪空间坐标:

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1353
1353

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











