







 文章讲述了如何不使用Simulink自带的PID控制器模块,而是通过理解PID算法来创建自己的控制器。作者首先介绍了PI控制器的基本算法,然后展示了如何在MATLABfunction中实现积分部分的计算,最后通过比较自建模型和Simulink内置PID控制器在相同参数设置下的输出结果,验证了自制控制器的正确性。
文章讲述了如何不使用Simulink自带的PID控制器模块,而是通过理解PID算法来创建自己的控制器。作者首先介绍了PI控制器的基本算法,然后展示了如何在MATLABfunction中实现积分部分的计算,最后通过比较自建模型和Simulink内置PID控制器在相同参数设置下的输出结果,验证了自制控制器的正确性。
接着上回的内容,小编尝试着不使用Simulink自带的PID控制器模块,而直接从PID控制器的算法出发,自己做一个PID控制器。如果自己的PID控制器和simulink自带PID控制器得到的结果相同,则认为自己的PID控制器正确。
首先,来看一下PID的控制算法,为了方便,我们先只讨论PI控制器,如下图:
![]()
其中v是PID的输出量,它由两部分组成,分别是Ppart(比例部分)和Ipart(积分部分),然后这两部分的表达式如下:
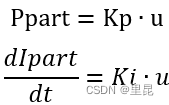
式中的参数Kp和Ki就是我们在simulink控制器中看到比例系数和积分系数,也就是PID控制器中我们经常要调整的模型参数。式子中的u是PID控制器中的输入量。所以,Ppart已经很明确了,接下来我们就要把Ipart表达出来,而不是上式中微分的形式,这里在simulink中通过matlab function将Ipart计算出来,matlab function中的脚本代码如下:
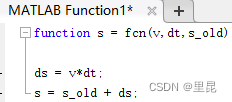
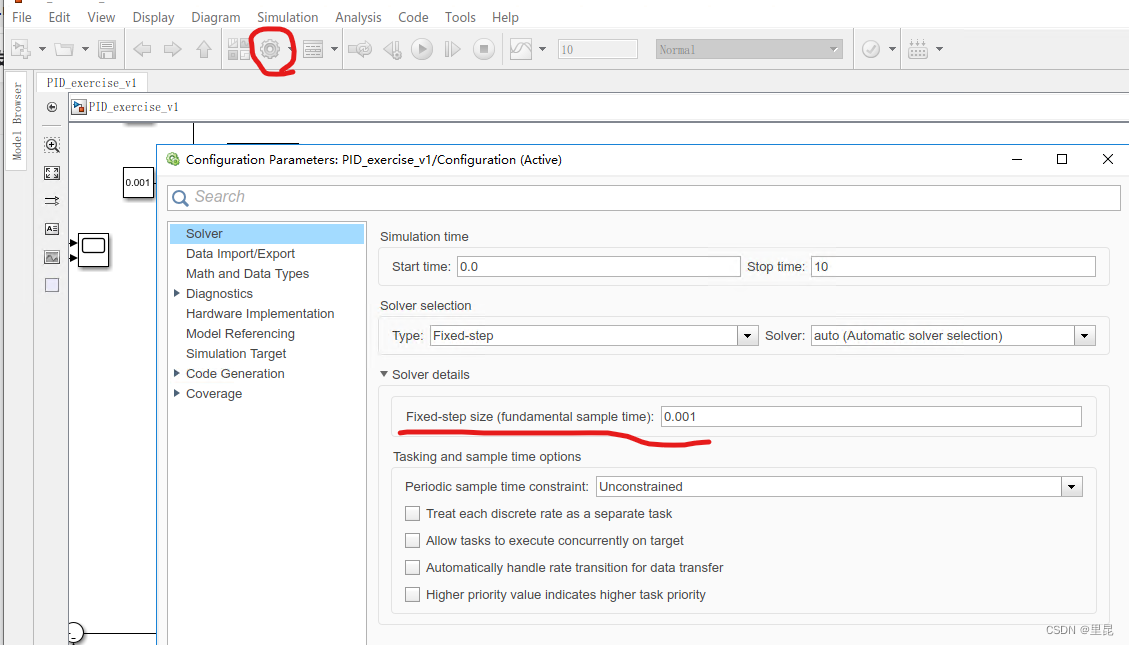
其中dt即仿真步长,也就是运行simulink模型时需要定义的fixed timestep,如下图。这里定义的仿真步长为0.001s。然后上图脚本中的v是fcn函数的一个输入量,对应PID算法中的Ki*u,然后上图脚本中的s是fcn函数的输出量,即对应PID算法中的Ipart,然后s和s_old,则为前后相邻两个仿真时间点的Ipart值。
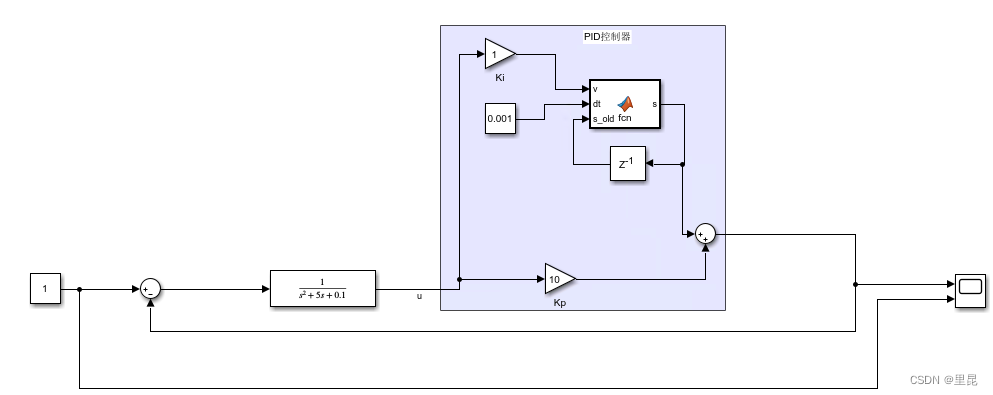
最后,在Simulink中搭建的PID控制器模型如下图:
然后,通过simulink自带的PID控制器搭建的模型,如下图:

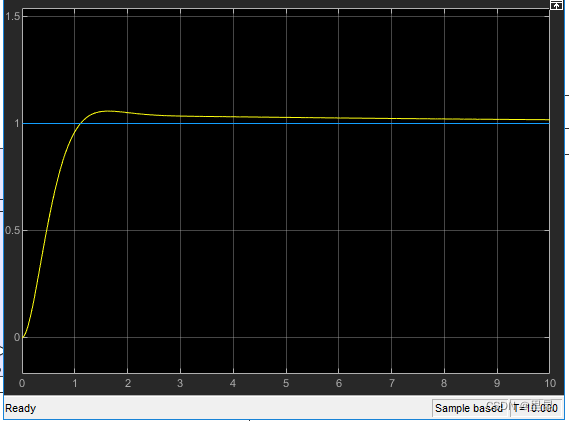
保持两个模型中Kp和Ki的参数相同,当前选用Ki=1、Kp=10,然后我们自己的PID控制器模型得到的结果如下:
然后用simulink自带PID控制器得到的结果如下:
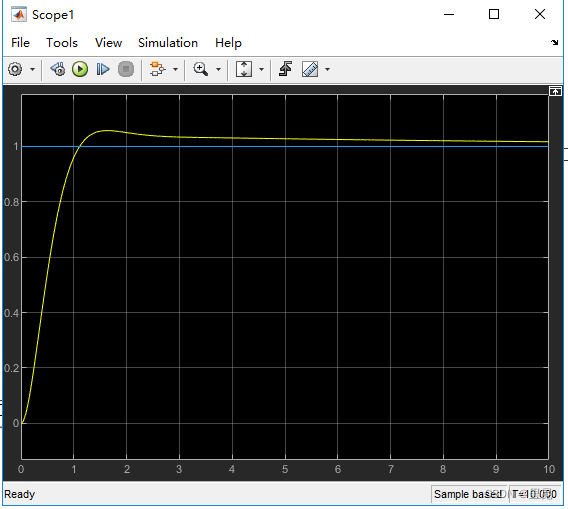
可以看到两个PID控制器得到的结果完全相同,由此证明自己通过PID算法搭建的控制器成功。

















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









