






✈️🔥低空协同新突破:无人机如何救火、找油、看穿盲区?三篇最新研究告诉你
文章目录
🌍 开篇:为什么低空协同很重要?
在未来的低空空间里,无人机+无人车的组合,可能像今天的“消防车+救护车”一样常见。
森林火灾中,无人机先进入火场探路、传回数据;地面无人车则拖着设备跟进救援。物流配送时,无人机飞送快递,地面车变成移动充电桩,保障“飞行快递员”不掉链子。
但要真正实现这样的低空协同,需要解决三大难题:
- 怎么走? 无人机必须能在火场、废墟等复杂环境中实时避障。
- 能走多久? 有限的电池是无人机的软肋,必须有更智能的补给机制。
- 看得清吗? 浓烟、盲区、复杂地形下,感知不全会让无人机“瞎飞”。
下面这三篇最新的研究,就分别回答了这三个问题。
📌 三篇最新论文解读
① 会救火的无人机:实时避障与低空协同搜救
论文:《Real-Time Obstacle Avoidance Algorithms for Unmanned Aerial and Ground Vehicles》
👉下载链接: https://arxiv.org/abs/2506.20311v1
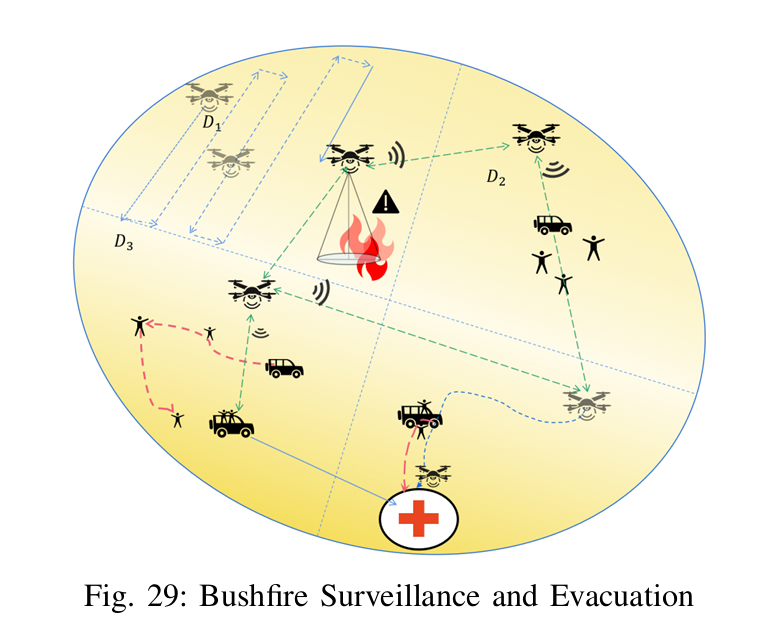
- 研究背景:传统无人机多用于航拍、测绘,而在灾害救援(如2019年澳洲山火)中,路径不确定、障碍动态(倒树、火焰蔓延)让导航极其困难。
-
创新方法:
-
三阶段算法设计:
-
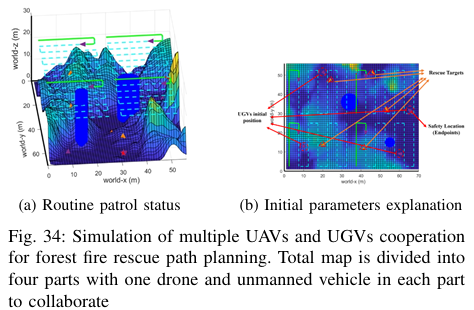
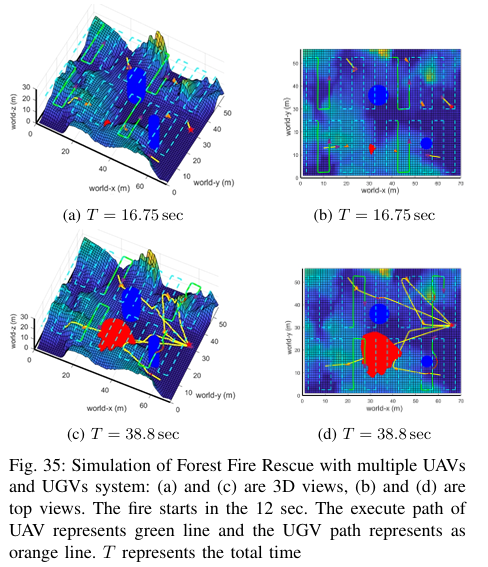
2D 融合导航:结合 RRT-Connect 全局采样 + 改进的反应式局部控制,保证机器人在动态环境下安全。
-
可变形障碍避障:引入多层次控制和重规划机制,模拟火焰或烟雾的扩散,让无人机能动态调整路线。
-
3D 反应式导航:在不平整地形(山谷、森林)中快速计算碰撞规避路径。
-
-
UAV-UGV 协同:提出一个“空地联合救援框架”,无人机负责前期探路、识别火点;无人车负责地面运输和疏散。
-
-
实验结果:
- 在模拟森林火灾场景中,算法能有效降低碰撞率;
- 计算复杂度显著低于传统全局规划,能在毫秒级完成避障决策。
-
价值:未来的森林消防,可部署一支“空地协同无人机队伍”,在火灾蔓延前完成侦察和疏散路径规划。
② 不会“饿死”的无人机:空地协同移动补给
论文:《Online Planning for Cooperative Air-Ground Robot Systems with Unknown Fuel Requirements》
👉 下载链接:
https://arxiv.org/abs/2506.20804v1
-
研究背景:无人机的续航往往不到30分钟,传统“先规划再执行”的方法一旦遇到目标任务耗能超预期,飞行就可能“中途阵亡”。
-
创新方法:
-
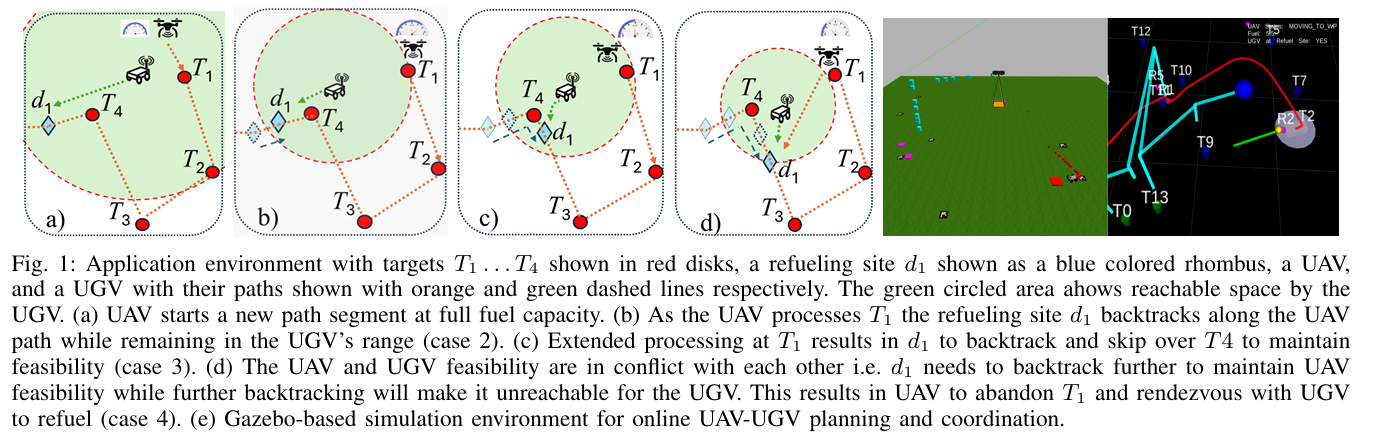
提出 FCURP-MRS(燃料受限无人机-移动补给站问题) 的在线版本;
-
两阶段解法:
- 离线初始规划:基于旅行商问题(TSP)的启发式方法,给无人机生成目标访问路径,并设置补给点。
- 在线动态调整:无人机在执行过程中根据真实燃料消耗,动态“回溯”补给点位置,并实时通知无人车移动。
-
“虚拟拉绳模型”:用一根“虚拟绳子”表示无人机剩余燃料与补给点距离,燃料减少就等于绳子缩短,当绳子拉紧时补给点自动回撤。
-
-
实验结果(Gazebo仿真):
- 无人机在 50×50m 的场景中执行任务,遇到不确定的目标处理时间时,依然能安全完成任务;
- 当目标过多或油耗超标时,算法能智能跳过部分目标并延后处理,保证整体任务完成率。
-
价值:适用于物流快递、灾害巡检等任务——无人机在前线持续工作,而地面车就是“跟随的充电宝”。
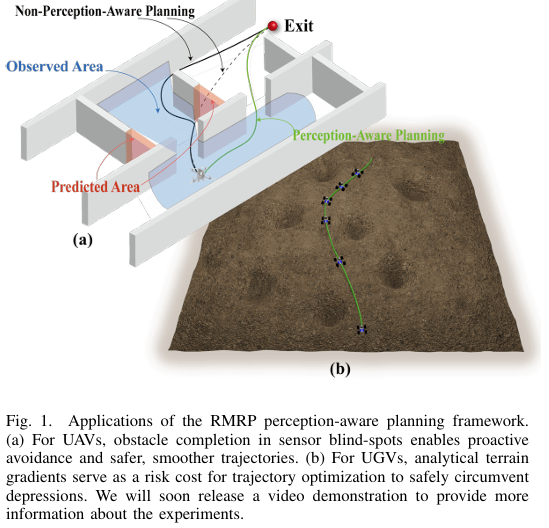
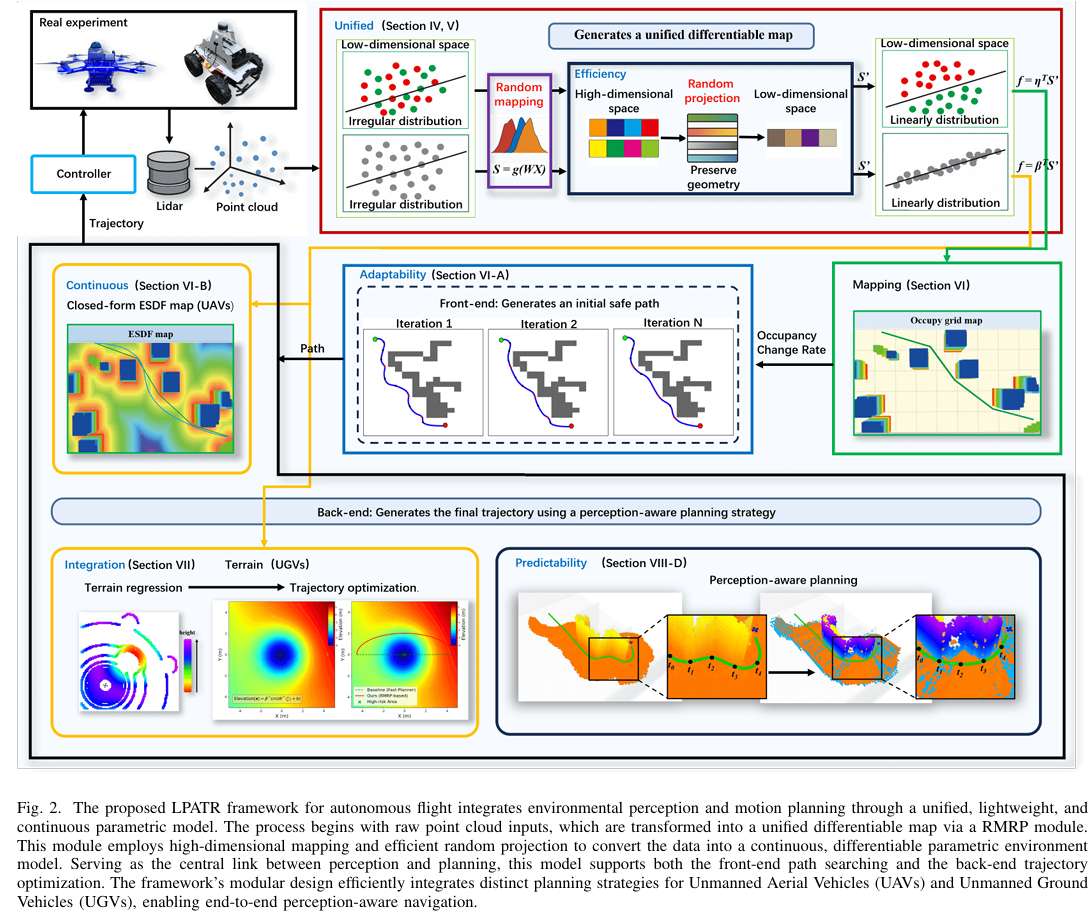
③ 看穿盲区的无人机:感知驱动的智能导航
论文:《Unified Linear Parametric Map Modeling and Perception-aware Trajectory Planning for Mobile Robotics》
👉 下载链接:
https://arxiv.org/abs/2507.09340v1
- 研究背景:无人机高速飞行中,一旦遇到感知盲区(烟雾遮挡、建筑死角),常来不及反应;地面无人车在复杂地形(坑洞、斜坡)上也易“翻车”。
-
创新方法:
-
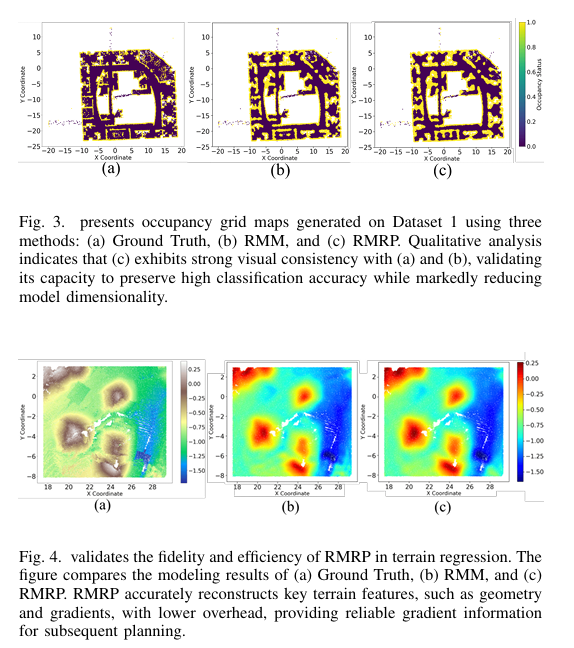
提出 RMRP(随机映射 + 稀疏投影),把点云数据映射到高维,再降维成一个轻量连续的参数化地图;
-
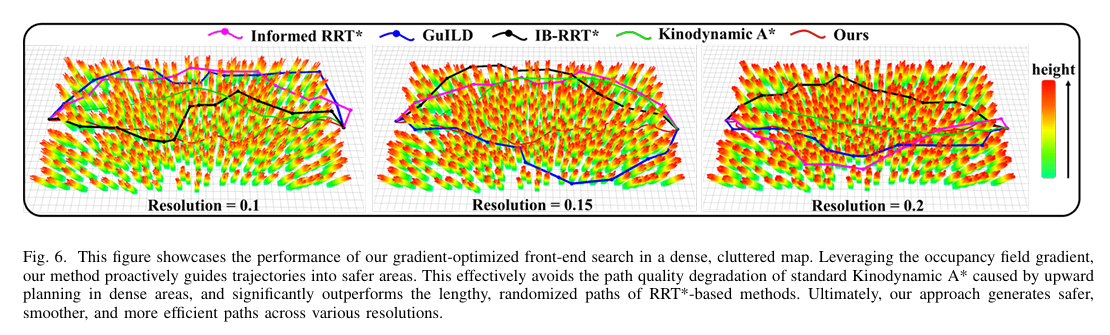
提出 RPATR(鲁棒感知轨迹规划器),能同时服务无人机和无人车:
- 无人机:补全传感器盲区,预测未观测障碍,生成更平滑安全的轨迹;
- 无人车:把地形建模为回归任务,计算坑洼的梯度,提前绕行。
-
-
实验结果:
- 在多场景测试中,RMRP 映射比传统占据栅格图节省超过 50% 内存;
- RPATR 生成的路径在安全性和轨迹平滑度上优于常用方法。
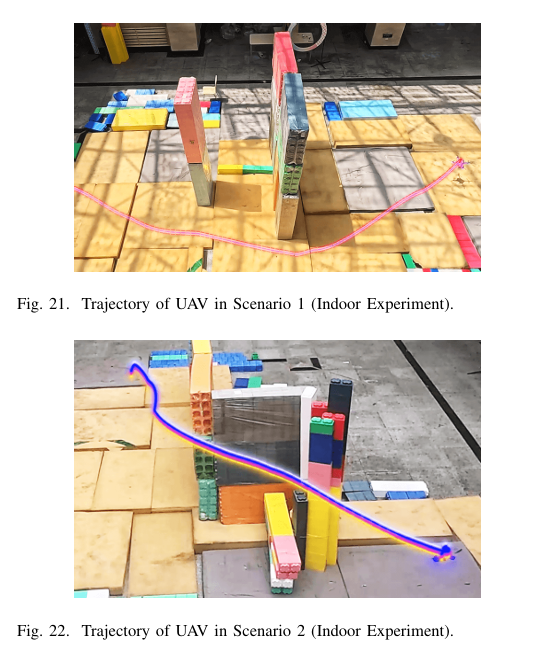
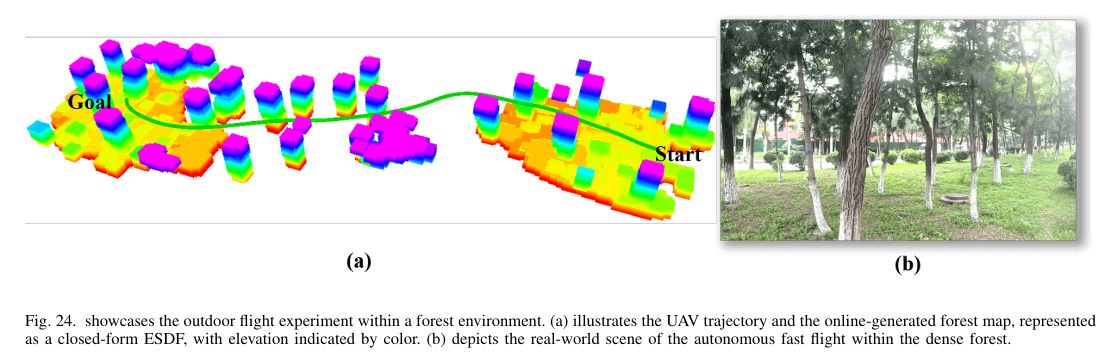
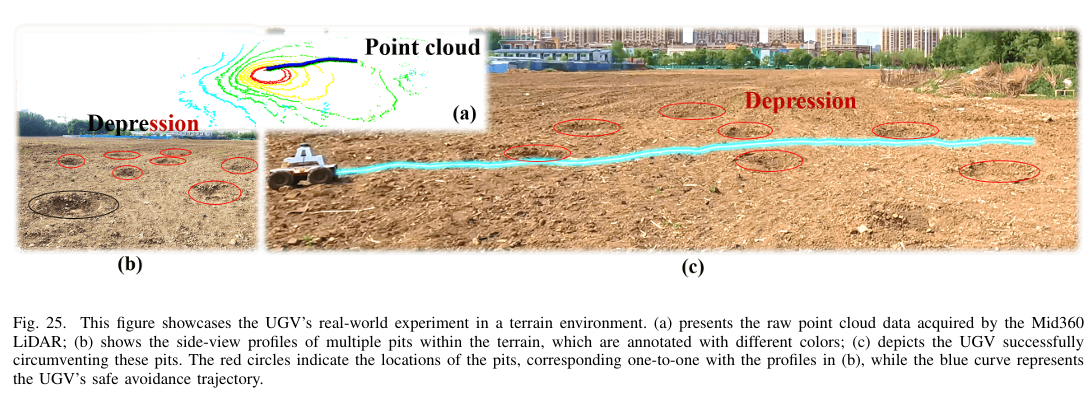
- 价值:让无人机具备“超视距感知”,地面车能“未雨绸缪”,实现真正的感知驱动型低空协同。
🔗 三者之间的联系
这三篇研究,像是为无人机量身打造的“三件法宝”:
- 大脑:实时避障与任务规划(Wei, 2025)
- 胃:在线能量补给机制(Agarwal et al., 2025)
- 眼睛:感知盲区预测与补全(Nie et al., 2025)
它们共同支撑了低空协同智能系统:
- 无人机不仅能在灾害环境里自主避障,还能持久续航,
- 更能看见“看不见的危险”,为地面车提供安全导航支持。
未来,低空协同将不仅改变救援方式,也将重塑物流、巡检、城市管理等场景。
🚀 结语:低空协同的未来
科幻电影中的场景——“一群无人机在火场中穿梭,地面车紧随其后,实时补给并接应伤员”——正在走向现实。
随着这三类技术的逐渐融合,我们距离一个 “不迷路、不掉电、不撞墙”的无人协同时代,正在越来越近。

















 1482
1482

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









