







一、终止过程中的缓冲类型
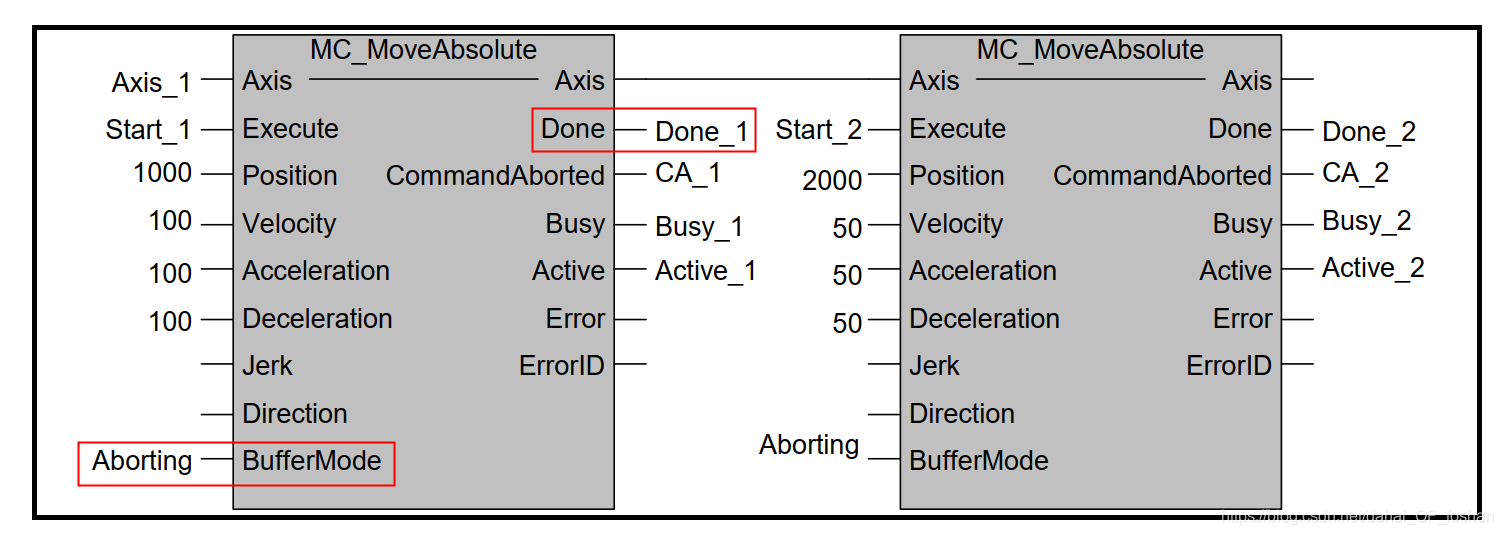
通过**BufferMode ** 来定义运动模块终止过程的缓冲类型,这个模式是可选择模式:
-
非**BufferMode ** 模式的停止命令立即生效,终止当前的插补运动
-
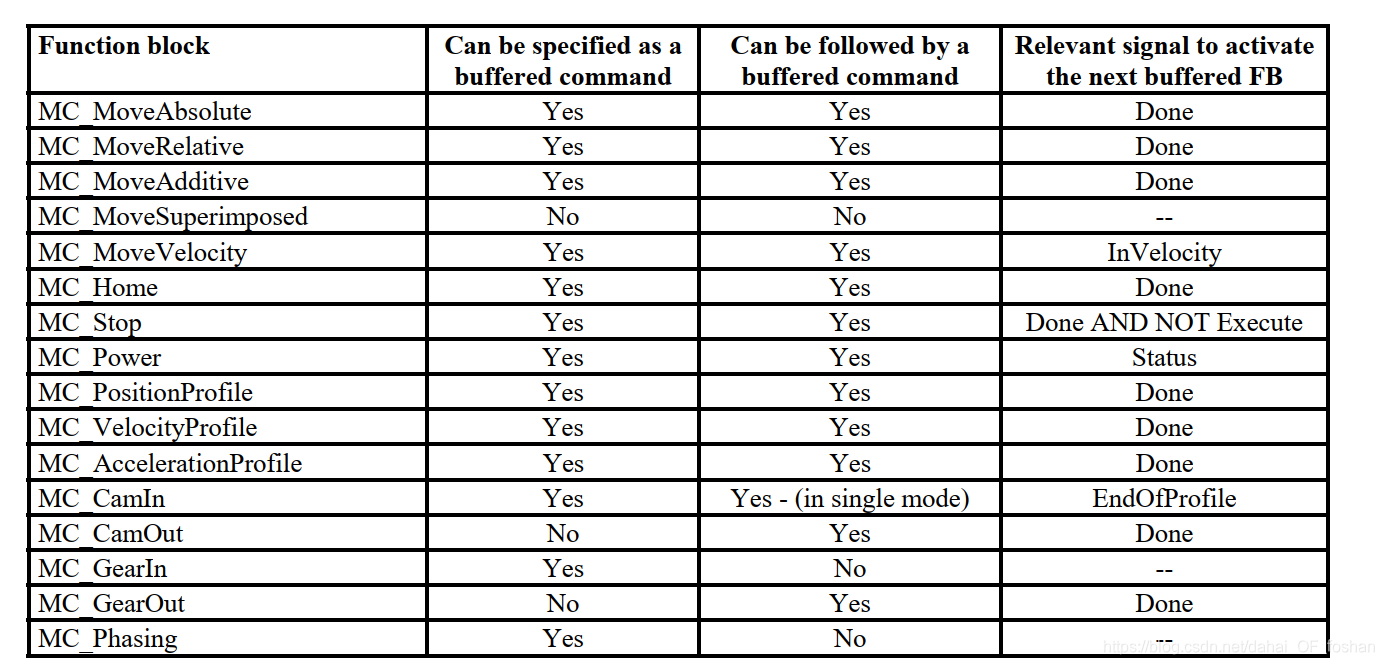
BufferMode ** 类型的运动,需要等到上一个运动的状态为Done** 后才能开始
- Aborting :Default mode without buffering. The next FB aborts an ongoing motion and the command affects the axis immediately 。默认立即终止,无终止过程
- Buffered :The next FB affects the axis as soon as the previous movement is ”Done” There is no blending. 当前指令运动需等上一个运动完全完成后且状态为Done时再开始,没有混合运动过程。
- BlendingLow :The next FB controls the axis after the previous FB has finished (equivalent to buffered),but the axis will not stop between the movements. The velocity is blended with the lowest velocity of both commands (1 and 2) at the first end-position (1)
二、个别感兴趣的控制模块
1. Position Profile

定义一个基于时间变化的轨迹,可以定义几个轨迹点信息。

















 5113
5113

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









