




基于去噪扩散模型的特征操作变化检测
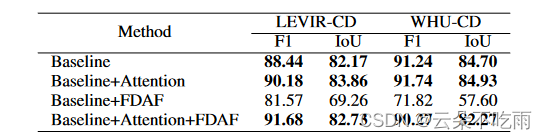
文章提出了一种基于去噪扩散概率模型(DDPM)的特征操作变化检测方法。变化检测是计算机视觉中的经典任务,涉及分析不同时间捕获的图像对,以识别场景中的重要变化。现有基于扩散模型的方法主要关注提取特征图,而本文的方法专注于操作扩散模型提取的特征图,使其在语义上更有用。文章提出了两种方法:特征注意力(Feature Attention)和流对齐融合(Flow Dual-Alignment Fusion, FDAF)。在LEVIR-CD数据集上,带有特征注意力的模型实现了最先进的F1分数(90.18)和IoU(83.86)。
文章贡献:
提出了两种新的特征操作机制:特征注意力和FDAF,以增强模型的性能。
展示了扩散模型在遥感变化检测中的适用性和潜在好处。
通过实验验证了提出方法的有效性,并在LEVIR-CD数据集上取得了先进的性能。
方法
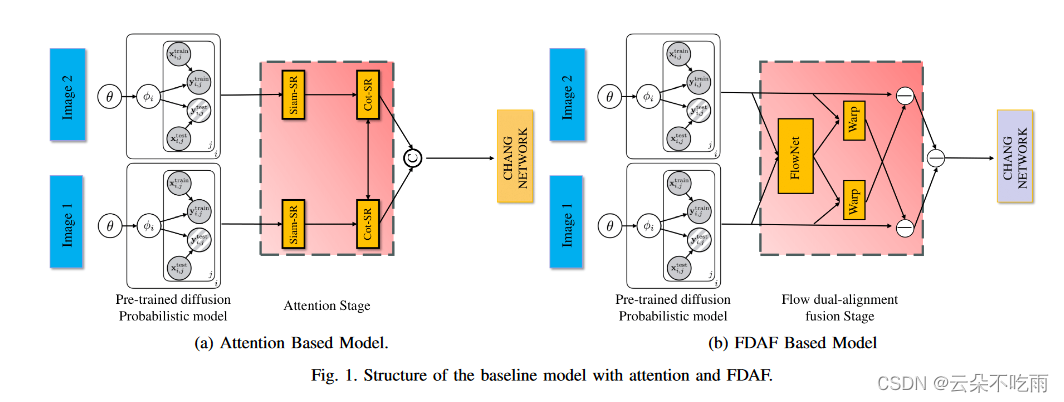
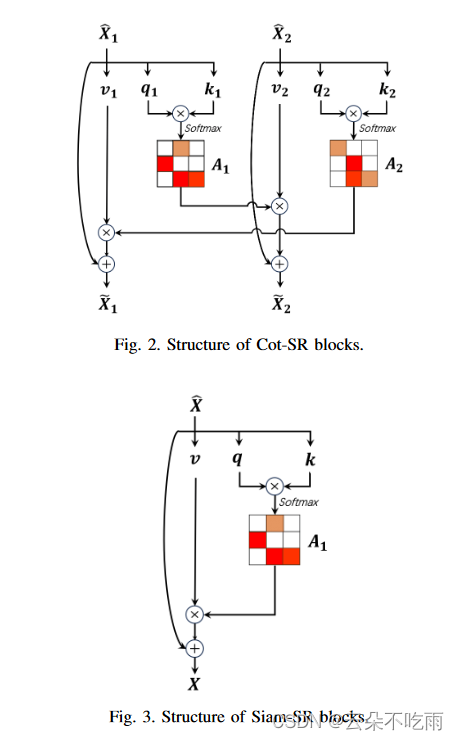
- 特征注意力(Feature Attention):通过学习双特征图之间的相互关系来增强变化检测的效果。
- 流对齐融合(FDAF):旨在通过图像配准和融合机制来减少环境噪声的影响,提高变化检测的清晰度。
在进行变化检测时,算法需要能够准确识别出图像中真实有意义的变化,比如建筑物的新增或土地使用的变化,同时忽略掉由环境因素如光照、天气、季节变化等引起的图像差异,这些因素会在图像中引入噪声。
精度
结论
特征注意力机制可以显著提高变化检测的性能,尤其是在捕捉和利用双时相图像序列之间的时间相关性方面。
FDAF方法虽然理论上旨在通过对齐和融合机制减少噪声,但在实验中显示出了性能下降的问题,可能是因为它在过滤环境噪声的同时,模糊了比较图像之间的关键特征差异。
未来的研究需要改进FDAF机制,确保在不损害目标特征差异的完整性的情况下,有效去除环境噪声。
本文提出的研究框架为变化检测技术的发展提供了新的方向,通过迭代改进,有望广泛应用于变化检测领域。
研究背景:
-
将伪变化视为噪声
在进行变化检测时,算法需要能够准确识别出图像中真实有意义的变化,比如建筑物的新增或土地使用的变化,同时忽略掉由环境因素如光照、天气、季节变化等引起的图像差异,这些因素会在图像中引入噪声。 -
在变化检测任务中,区分这两种类型的“变化”是至关重要的,因为:
-
有意义的变化:这些变化通常与人类活动、自然现象或其他重要的环境变化有关,对于环境监测、城市规划、灾害评估等应用领域具有重要价值。
-
环境因素引起的变化:这些变化通常是临时性的或周期性的,比如季节性的植被变化、天气条件变化(如云层覆盖、降水)或光照变化等,它们可能在图像中产生误导性的信号,但并不一定表示实际的物理变化。
-
-
文章中强调的挑战包括:
- 噪声过滤:如何从遥感图像中过滤掉由环境因素引入的噪声,以便更准确地识别出有意义的变化。
- 特征提取:如何设计算法以突出与实际变化相关的图像特征,同时抑制与环境变化相关的特征。
- 准确性与鲁棒性:提高变化检测算法的准确性和鲁棒性,确保在不同环境条件下都能稳定地检测出有意义的变化。
为了应对这些挑战,文章提出了基于DDPM的特征操作方法,通过特征注意力和FDAF来增强模型对变化的识别能力,从而在复杂的环境条件下实现更准确的变化检测。



















 1483
1483

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











