






rosbag2类似于行车记录仪,录制一段话题数据,录制完成后可以多次发布出来进行测试和实验,也可以将话题数据分享给别人用于验证算法等。
1.启动talker服务
ros2 run demo_nodes_cpp talker
2.记录话题数据 chatter
ros2 bag record /chatter

记录多个话题的数据
ros2 bag record topic-name1 topic-name2记录所有话题
ros2 bag record -a
-o name 自定义输出文件的名字
ros2 bag record -o file-name topic-name查看录制出话题的信息
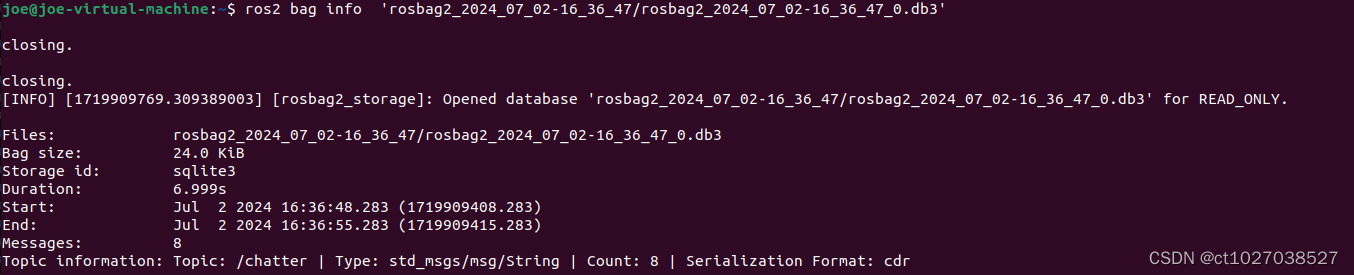
我们在播放一个视频前,可以通过文件信息查看视频的相关信息,比如话题记录的时间,大小,类型,数量
ros2 bag info bag-fileros2 bag info 'rosbag2_2024_07_02-16_36_47/rosbag2_2024_07_02-16_36_47_0.db3'
4.1 播放话题数据
接着我们就可以重新的播放数据,使用下面的指令可以播放数据
ros2 bag play xxx.db3
ros2 bag play 'rosbag2_2024_07_02-16_36_47/rosbag2_2024_07_02-16_36_47_0.db3'
提高10倍速率播放
ros2 bag play 'rosbag2_2024_07_02-16_36_47/rosbag2_2024_07_02-16_36_47_0.db3' -r 10
轮询播放
ros2 bag play 'rosbag2_2024_07_02-16_36_47/rosbag2_2024_07_02-16_36_47_0.db3' -l
播放指定话题数据
ros2 bag info 'rosbag2_2024_07_02-16_36_47/rosbag2_2024_07_02-16_36_47_0.db3' --topics /chatter
使用ros2的topic的指令来查看数据
ros2 topic echo /chatter

















 2173
2173

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









