 希捷16T硬盘文件变0字节恢复方法
希捷16T硬盘文件变0字节恢复方法





一块希捷16TB的硬盘用于存储黑魔法(BMD)和索尼(SONY)两种摄像机拍摄的视频素材,故障现象为“不少素材文件突然变成0字节”,当遇到这种情况应该如何恢复呢?下边来看看如何处理这类问题。
故障存储:
希捷ST16000NM000J 16TB硬盘/文件系统:Exfat
拍摄设备:
黑魔法(BMD)-Pocket Cinema Camera 6K Pro
索尼(SONY)-A7m4
故障现象:
客户描述正常使用,某日查看一个客人的素材时发现大量的视频文件突然变成了0字节。
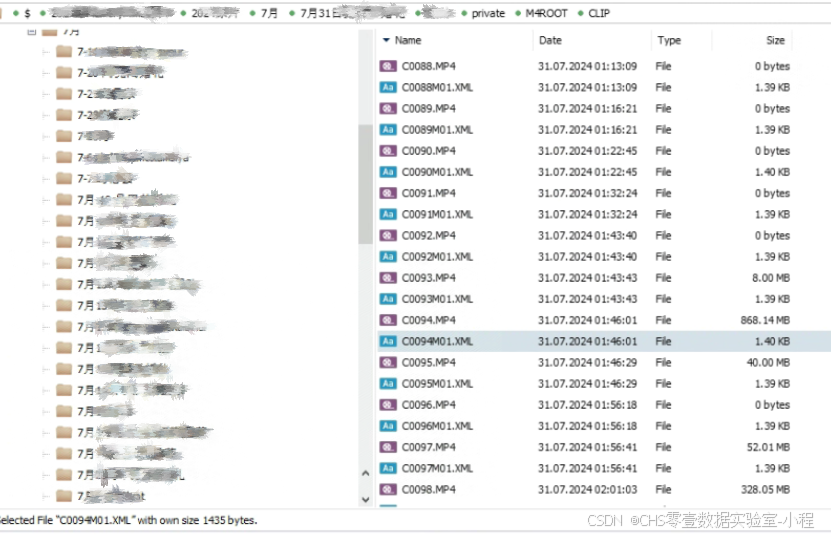
图1:索尼(SONY)A7m4拍摄的mp4素材文件变成了0字节
索尼的mp4文件一般视频编码为avc或者hvc,而黑魔法(BMD)拍摄的文件一般为braw,典型的RAW级视频编码,解码需要使用BMD的播放器或者专业的第三方编辑软件如达芬奇、ASSIMILATE。
故障分析:
虽然处理了很多这种案例,但还是对此问题做个简单的说明(感兴趣的请看博主“答疑解惑栏目”):
- exfat文件系统出错导致文件全部0字节。
关于exfat之前说过很多次,但是近期使用此文件系统出问题的机率如此频繁,所以我再赘述下。exfat 全称是Extended File Allocation Table File System,扩展FAT文件系统。重点突出的是File Allocation Table---FAT文件分配表(简称FAT表),从字面意思就能看出,exfat并非全新的文件系统,而是对原来FAT32文件系统的升级加强版,其仍然沿用FAT32的FAT表来对存在碎片的文件进行管理(结构上和FAT32完全一样)。
exfat在存储时使用两种方式,对文件进行分类:
- 无碎片文件,即连续存放的文件,通过在exfat目录项中记录首簇指针和长度来获取文件的链表,减少文件系统额外的IO时间。
- 存在碎片的文件,即不连续存放的文件。因为情况1是一种理想状态,需要各种条件满足才能达到,但是更多情况下是文件不得不以碎片的形式存在(比如经常删除或者使用空间快要达到上限),这种情况下仍然使用FAT32的FAT表进行文件的表链记录。目录项中只记录首簇指针和文件大小,通过首簇指针进行FAT表跳转,和FAT32是一样的。
这里不讨论exfat的优劣和传输速度,微软开发exfat初衷是为了解决闪存类的文件系统存储问题,为了弥补FAT32的不足以及NTFS的过于臃肿,所以exfat的最优使用就是卡类(如SD卡MMC卡等摄像机存储单元),而由于FAT表前置这种先天缺陷,个人认为exfat实际上不具备管理大型存储设备的能力。其唯一的优势也就是在WINDOWS 和MAC OS系统中自由切换(MAC系统下“免驱动”)。
故障处理:
之前此类问题都是使用高级版来进行底层RAW级视频碎片扫描和重组,虽然能解决问题,但是由于这一类硬盘容量较大(动辄8T/16T/32T)这样导致扫描时间过长。CHS工程师在长期恢复这类数据的基础上不断总结经验并不断优化算法,目前发布的CHS零壹视频恢复程序影视版已经支持了”exfat文件变0字节“的恢复功能,此功能扫描速度极快,所以直接使用影视版扫描即可!
STEP1:运行CHS零壹视频恢复程序影视版 选择要扫描的盘符,点击右键选择“扫描“,影视类型->exfat文件变0字节,扫描小类->3:NEV/MOV/MP4(根据不同的文件选择即可),点击确定开始扫描。
注意:exfat文件变0字节功能仅支持exfat文件系统。
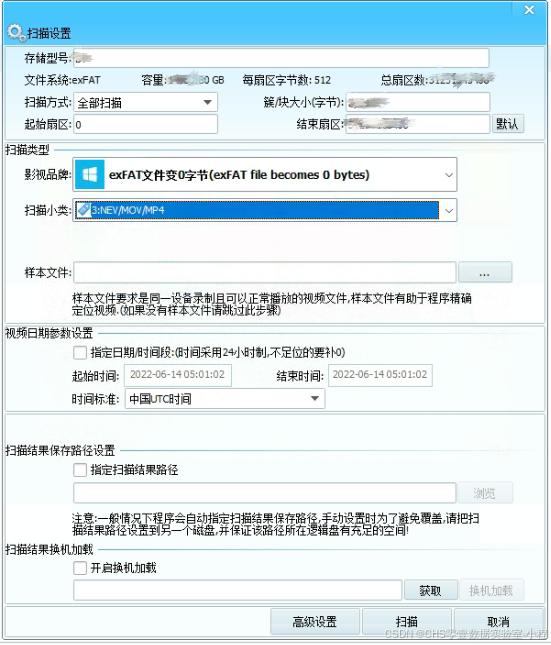
图3:实际扫描时请参考上图的扫描大类
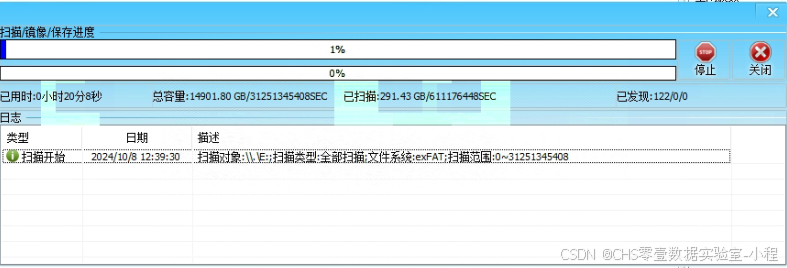
STEP2:等待扫描完成。
STEP3:查看数据,经过扫描发现了不少黑魔法(BMD)和SONY的素材文件,可以看到程序已经列出了视频文件的“拍摄时间、摄像机型号、视频编码、时长、实际长度、文件名”等属性,这些文件属性可以大大提升核对文件的效率,至此数据恢复工作完成。
从图4可以看到BMD的拍摄时间都不正常,后续和客户沟通确认是摄像机存在问题,不过这种情况仍然可以通过文件名一项进行辨别。
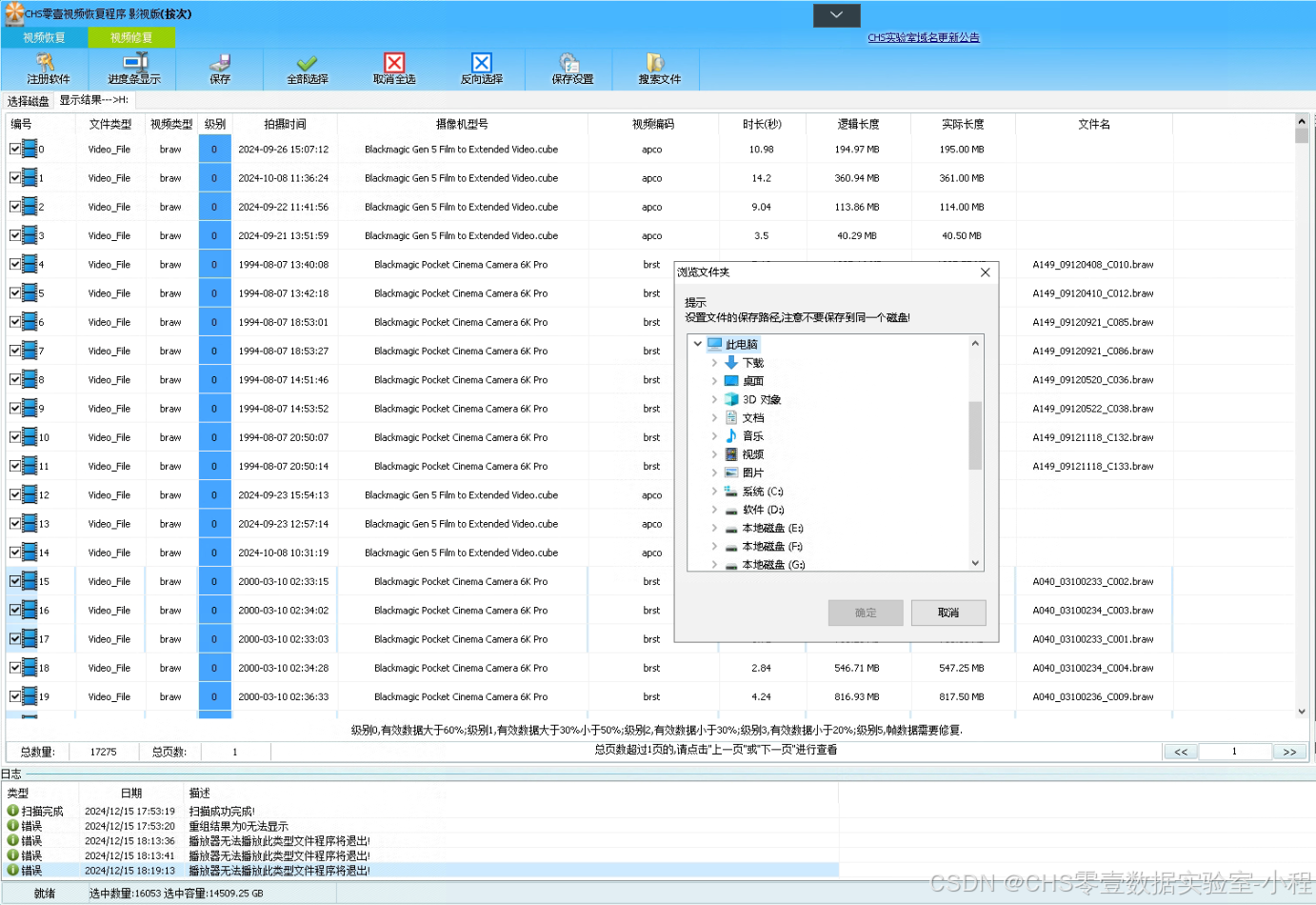
图4:黑魔法(BMD)拍摄的部分素材
这就是希捷16TB硬盘素材文件突然变0字节的恢复方法,目前CHS零壹视频恢复程序影视版支持:
红数码影视(RED Digital Cinema) 、阿莱影视(ARRI AG)、黑魔法影视(Blackmagic design)、大疆(DJI)、原斯科技(ATOMOS)、AJA影视系统(AJA)

等专业影视品牌的视频恢复和修复,当大家遇到这类问题时可以和CHS数据实验室联系!

















 2145
2145

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









