




 本文详细介绍了叉积的计算方法及其在计算机图形学中的多种应用,包括判断线段拐向、计算面积、判断点是否在三角形内部以及判断两直线是否相交。
本文详细介绍了叉积的计算方法及其在计算机图形学中的多种应用,包括判断线段拐向、计算面积、判断点是否在三角形内部以及判断两直线是否相交。
若p1×p2值为正,则相对于原点(0,0)来说,p1位于p2的顺时针方向;若p1×p2值为负,则p1位于p2的逆时针方向。图(b)展示了向量p的顺时针和逆时针区域。叉积为0时出现边界情况;在这种情况下,两个向量是共线的,指向相同方向或者相反方向。

为了确定相对于公共端点p0,有向线段p0p1−→−是在顺时针还是逆时针方向更接近p0p2−→−,我们将p0作为原点从而使问题简化。用p1-p0来表示向量p′1=(x′1,y′1),其中x′1=x1−x0,y′1=y1−y0,类似的,可以定义p2-p0。然后,计算叉积
(p1−p0)×(p2−p0)=(x1−x0)(y2−y0)−(x2−x0)(y1−y0)
下面是叉积的用途:
1.叉积判断线段拐向
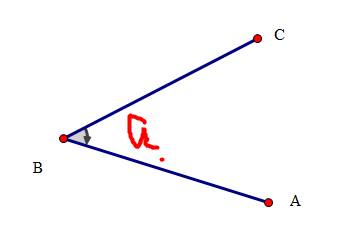
如上图,可以通过计算向量的叉积来判断拐向,即判断(C-B)×(A-B)的符号。
#若(C-B)×(A-B)> 0 ,则CB在B点顺时针得到AB
#若(C-B)×(A-B)< 0 ,则CB在B点逆时针得到AB
#若(C-B)×(A-B)= 0 ,则A,B,C三点共线。
如图,我们给三个点A,B,C,判断沿着AB到BC,在B点是向右拐还是向左拐。并求出拐的 角度。这个先直接用叉积判断拐向,然后再余弦定理计算角度即可,
用180减去这个角度便是拐的角度。
2.叉积还有一个重要的用处,就是用来求面积。
叉积用来求面积,求出的是有向面积,也就是说带正负号,
不过再取一下绝对值就是真正的面积大小了。
比如求三角形ABC的面积,先计算出叉积cross(A,B,C),
那么面积就是fabs(cross(A,B,C))/ 2.0
为什么呢?
我们看一下叉积的定义就知道了,a与b的叉积模为:
|a×b|=|a| |b| sin(a,b)他的几何意义就是以a和b为邻边的平行四边形的面积。

3判断点p是否在三角形内。
若在三角形内,则必有S.abc=S.abp+S.acp+S.bcp;若在三角形外,式子就不成立。
4.叉积能判断两直线是否相交。
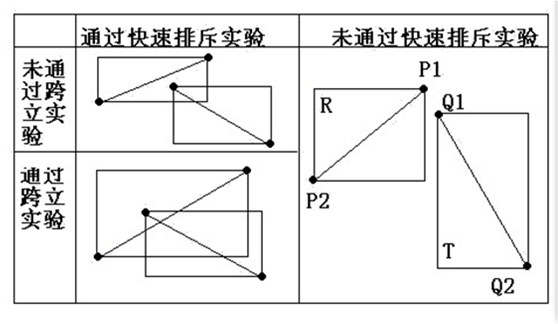
对于给出的两条线段A1A2,B1B2,判断他们是否相交需要分两步
(1)快速排斥实验
设以线段A1A2和线段B1B2为对角线的矩形为M,N;
若M,N 不相交,则两个线段显然不相交;
判断矩形相交,只需判断某一矩形是否有顶点在另一个矩形内即可。
所以:只有当满足第一个条件时,两个线段才可能相交。
(2)跨立实验
如果两线段相交,则两线段必然相互跨立对方.若A1A2跨立B1B2,则矢量( A1 - B1 ) 和(A2-B1)位于矢量(B2-B1)的两侧,
即:((A1-B1) × (B2-B1) )·( (A2-B1) × (B2-B1))<0。
上式可以改写成:((A1-B1) × (B2-B1)) · ((B2-B1) × (A2-B1))>0。
当(A1-B1) × (B2-B1)=0时,说明A1B1和B2B1共线,但前面已经通过了快速排斥实验,所以A1一定在B1B2上,所以判断线段A1A2是否跨立B1B2的依据就是:
((A1-B1) × (B2-B1)) · ((B2-B1) × (A2-B1))>=0。
同理,判断线段B1B2是否跨立A1A2的依据是:((B1-A1) × (A2-A1)) · ((A2-A1) × (B2-A1))>=0。

















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









