






简介
本文详细介绍了如何在S32SD项目中通过Processor Expert自动生成代码的方式使用MPC5744P进行CAN通信。从新建项目、配置ProcessorExpert、自动生成代码到编译下载,一步步引导读者实现CAN报文的发送和接收功能。
一、创建工程
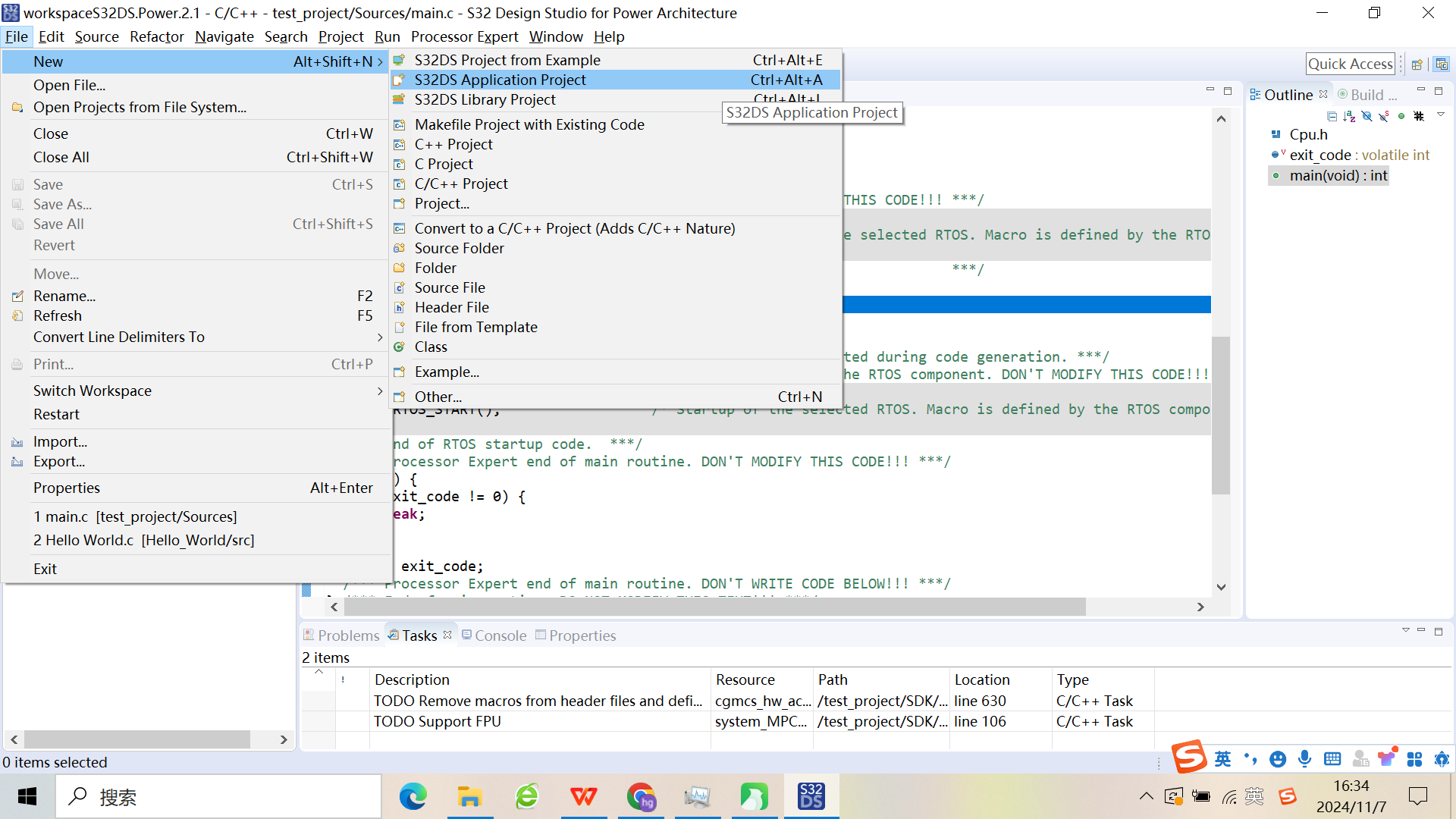
- 点击File->New->S32DS Application Project创建空白工程**。**
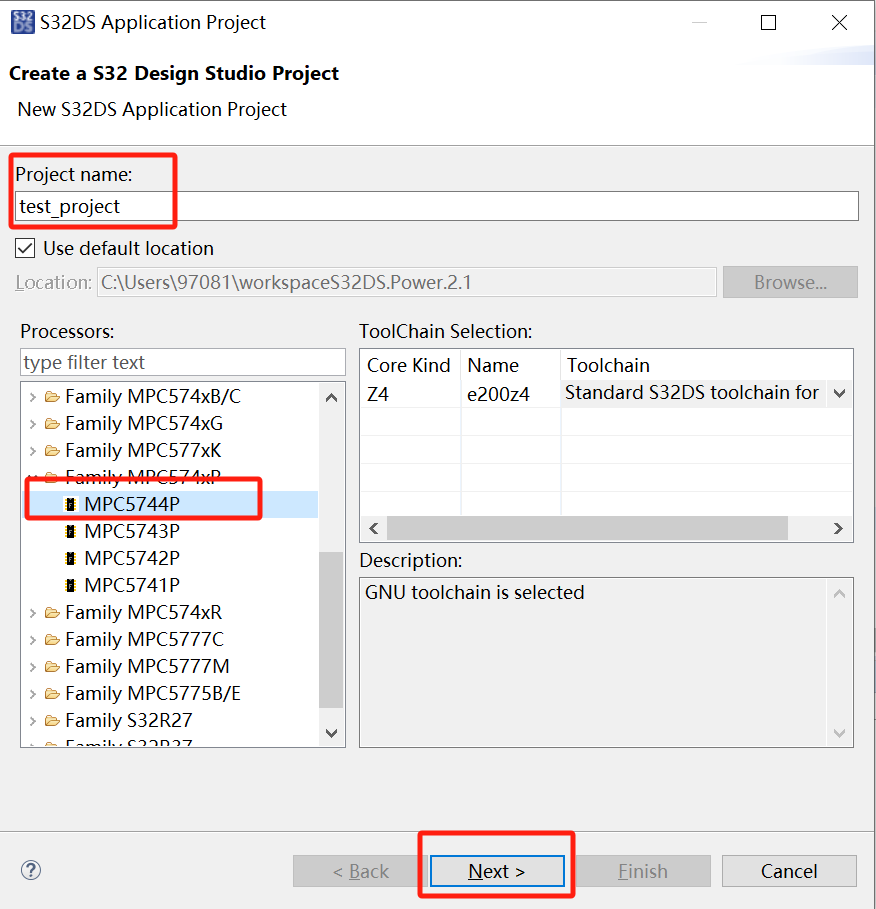
- 接着弹出如下工程配置界面。填写Project name工程名,Processors选择MPC5744P,点击Next。
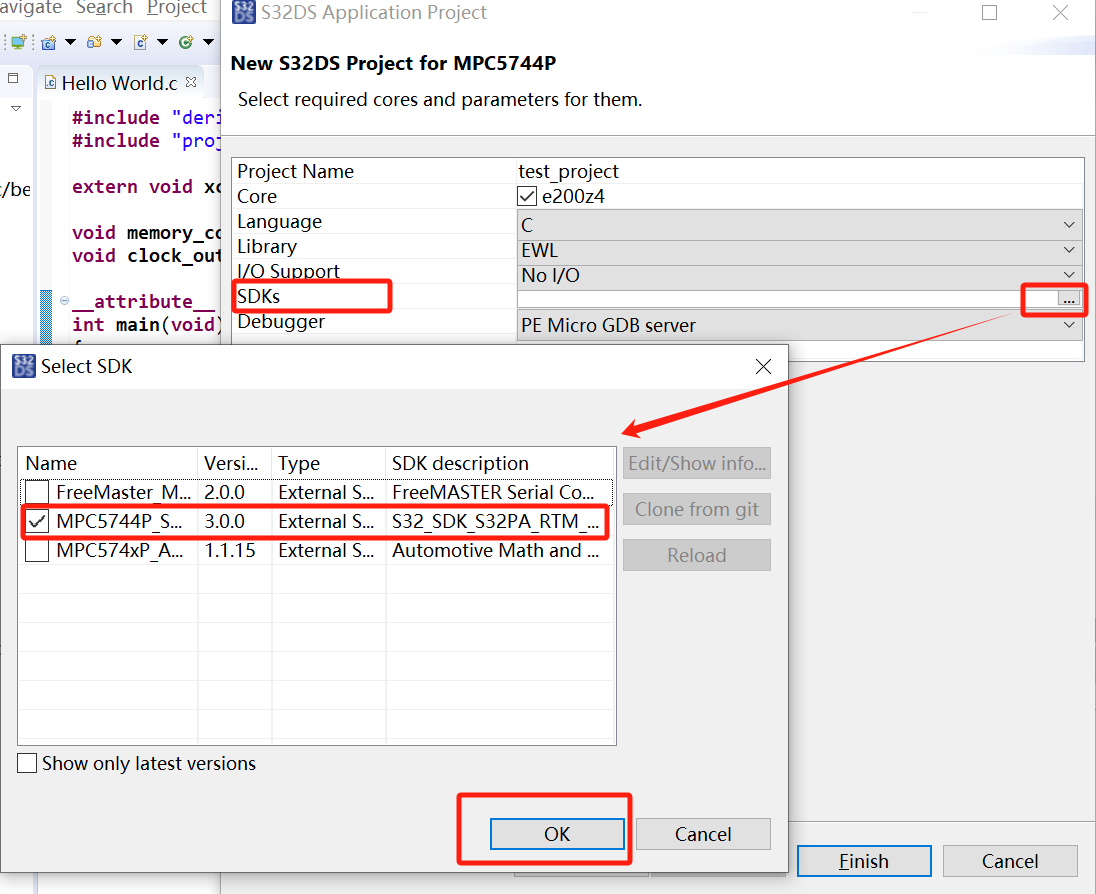
- 选择SDKs的版本,点击OK,如下图。
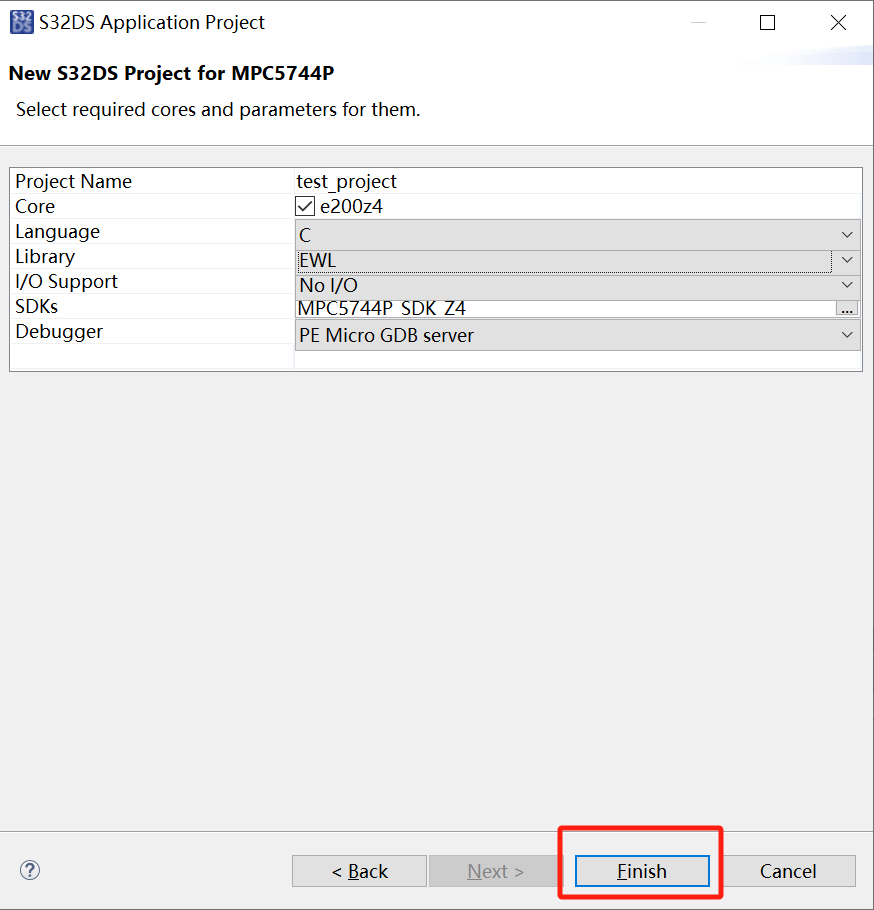
- 点击Finish。
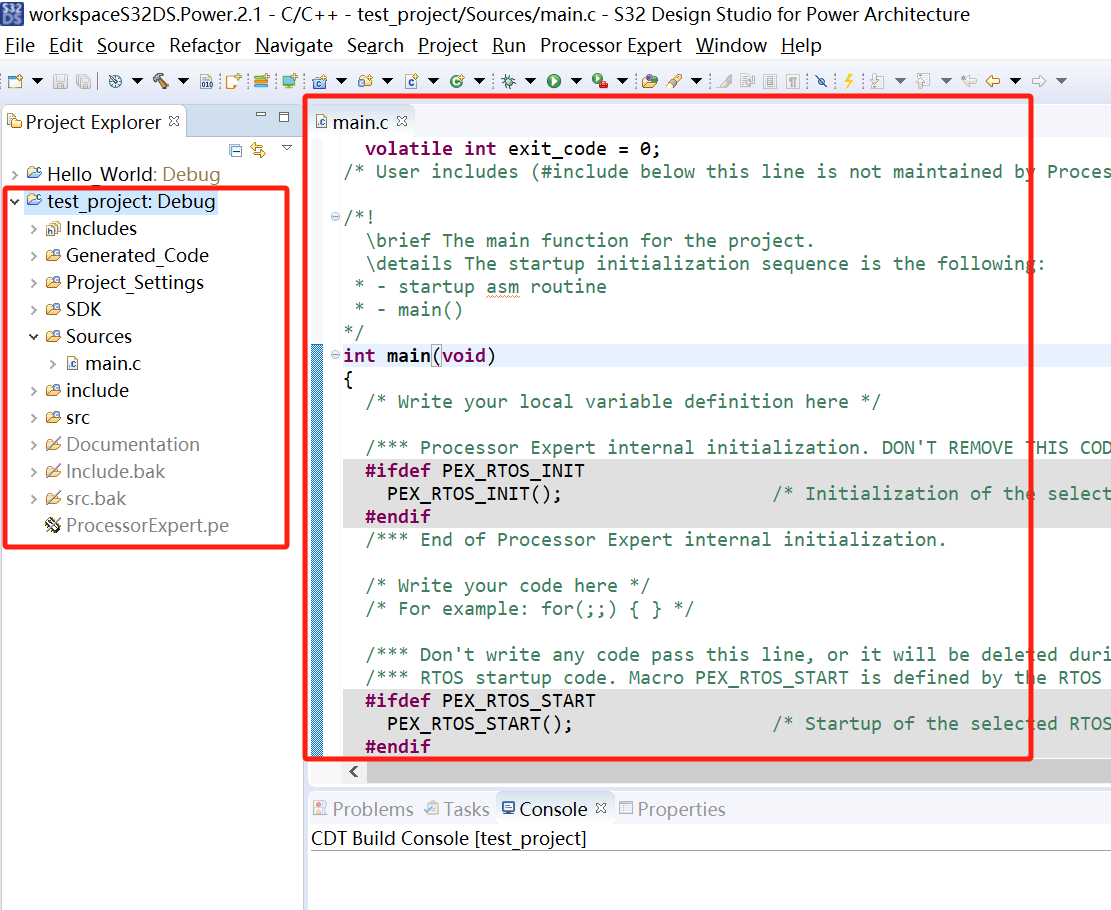
- 新建工程成功,如下图。
二、Processor Expert可视化界面配置
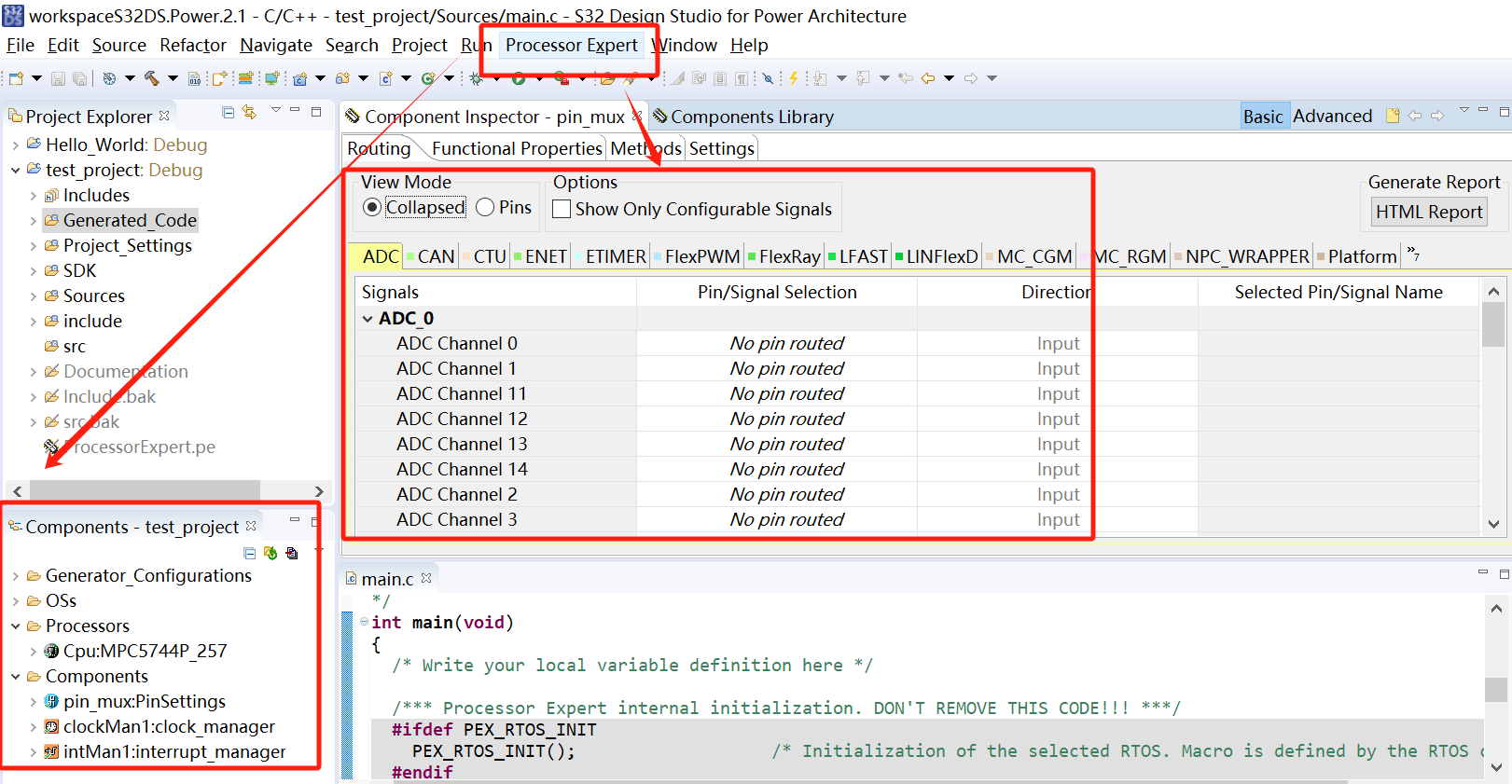
- 我们可以通过图形界面配置进行驱动代码的生成。点击主菜单区域的Processor Expert按钮,选择Show Views,弹出图形化界面,此时,我们可以通过图形界面对外设(GPIO、ADC、CAN等)进行配置。
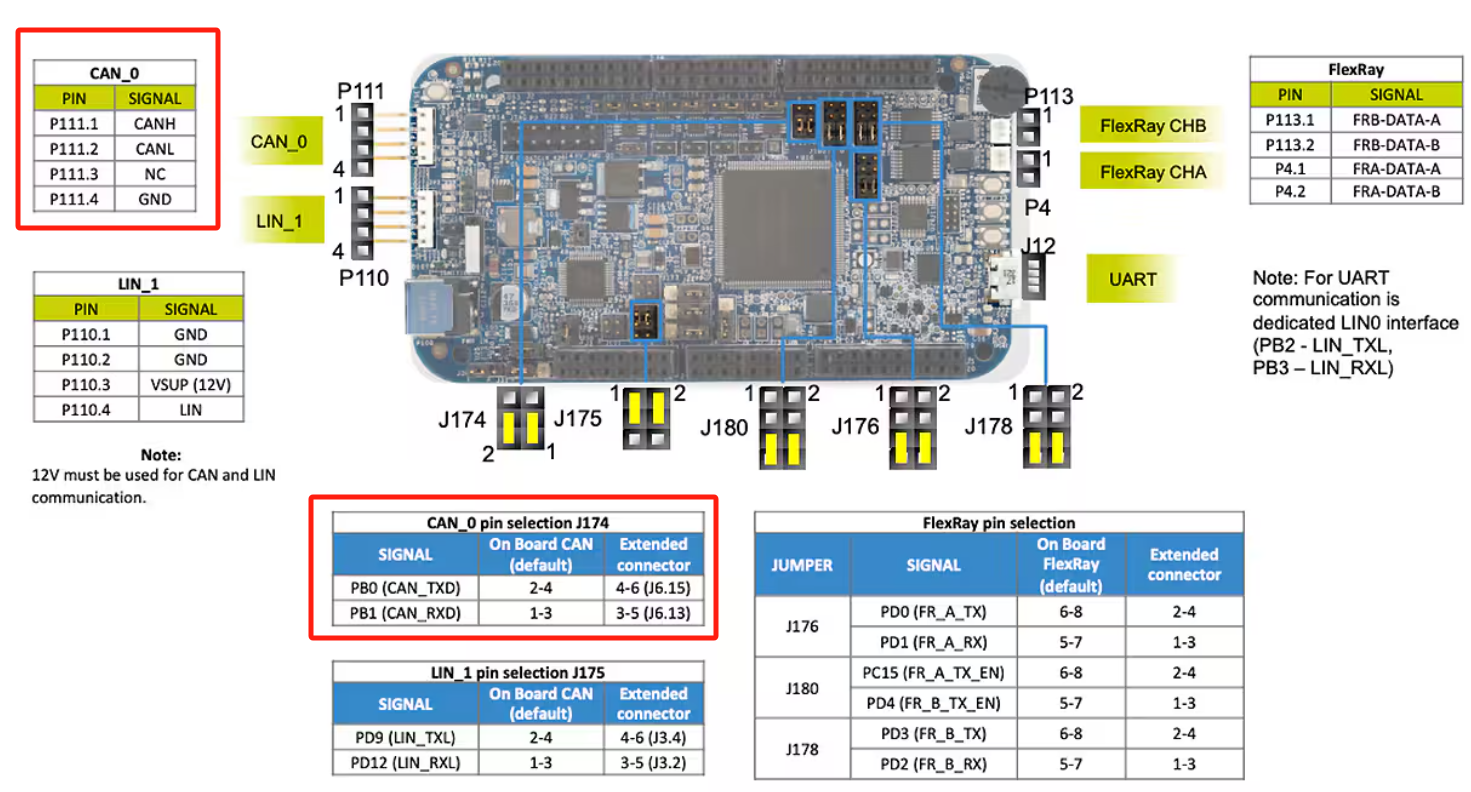
- 参考官方CAN通信接口,进行后续的配置。
注意:这里将开发板的J174端子进行如下图的连接,2接4,1接3。我们将CAN接口接出来跟外部的CAN连接,方便测试。然后外部的CAN盒设备与P111端子的CANH、CANL相连接。另外,CAN通信需要12V外部供电。
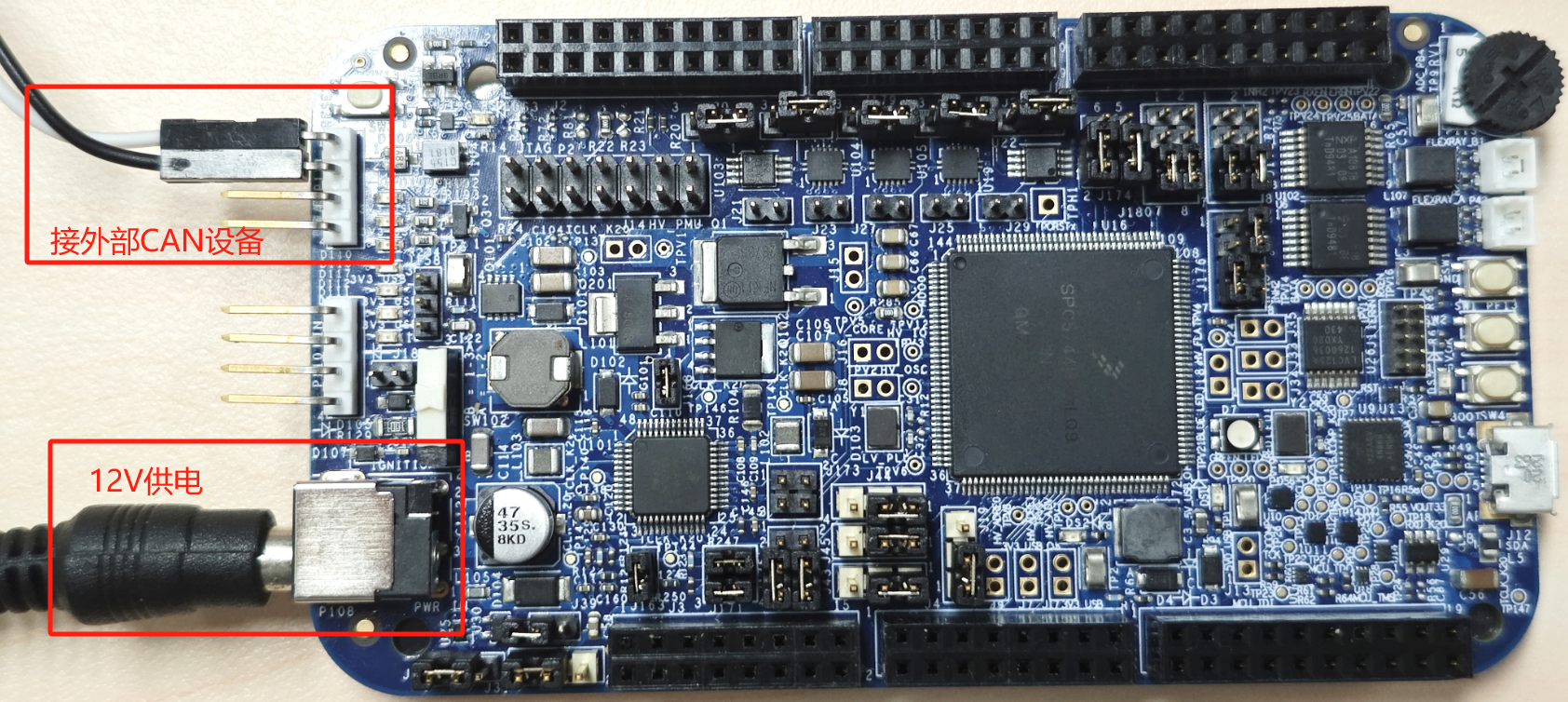
- 开发板的接线图如下图所示。
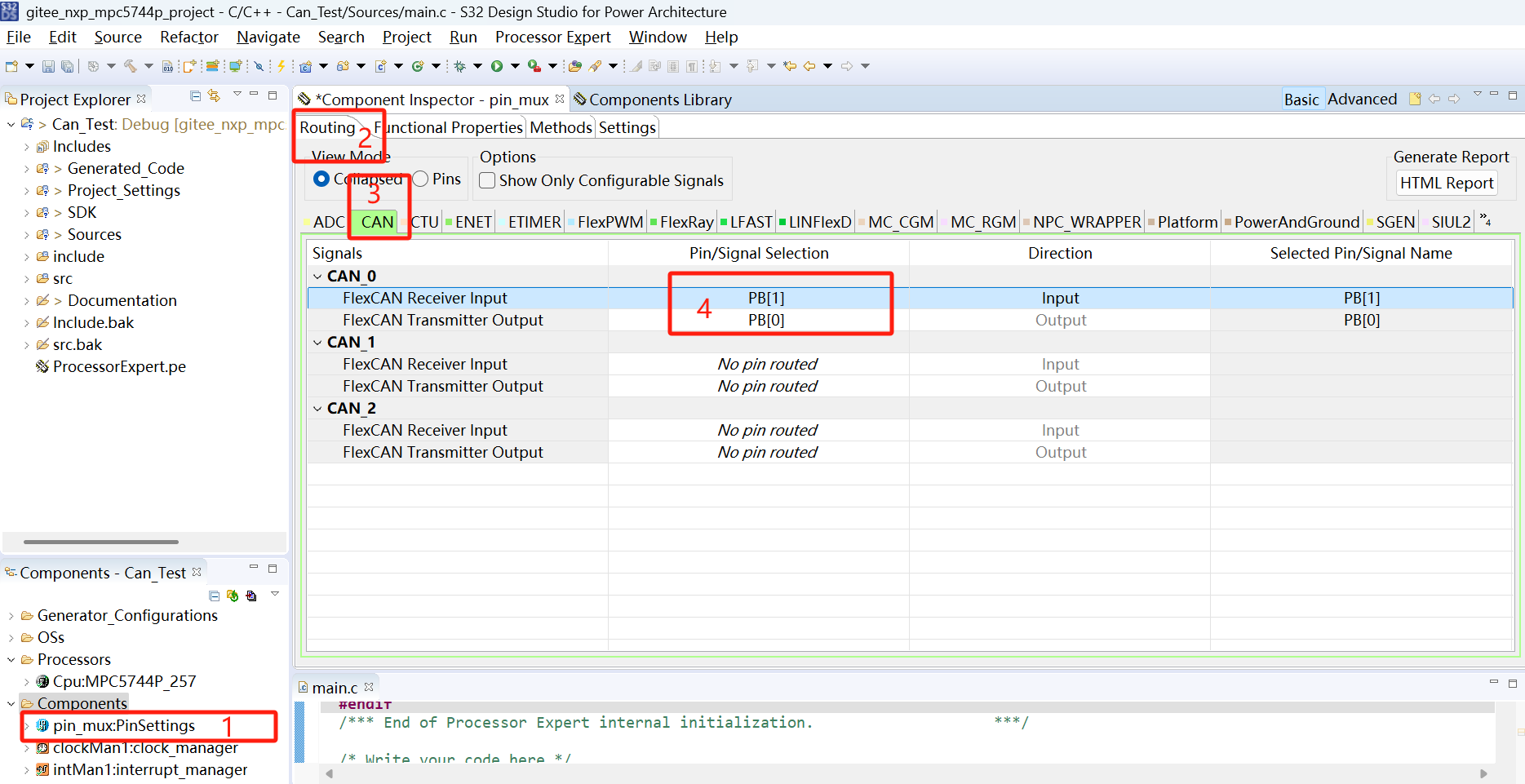
- 双击pin_mux,选中Component Inspector界面,然后在Routing界面选中Collapse,点击CAN,打开CAN引脚的配置界面。按照下图所示,我们来设置CAN的引脚。
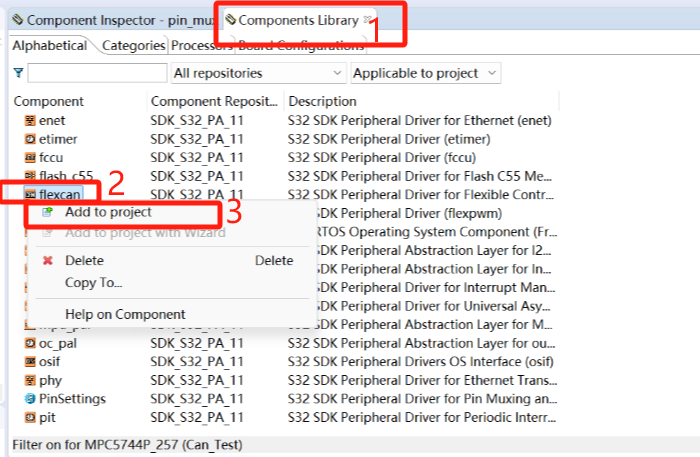
- 点击Components Library,选择flexcan,右键选择Add to project。将CAN驱动添加进项目中去。
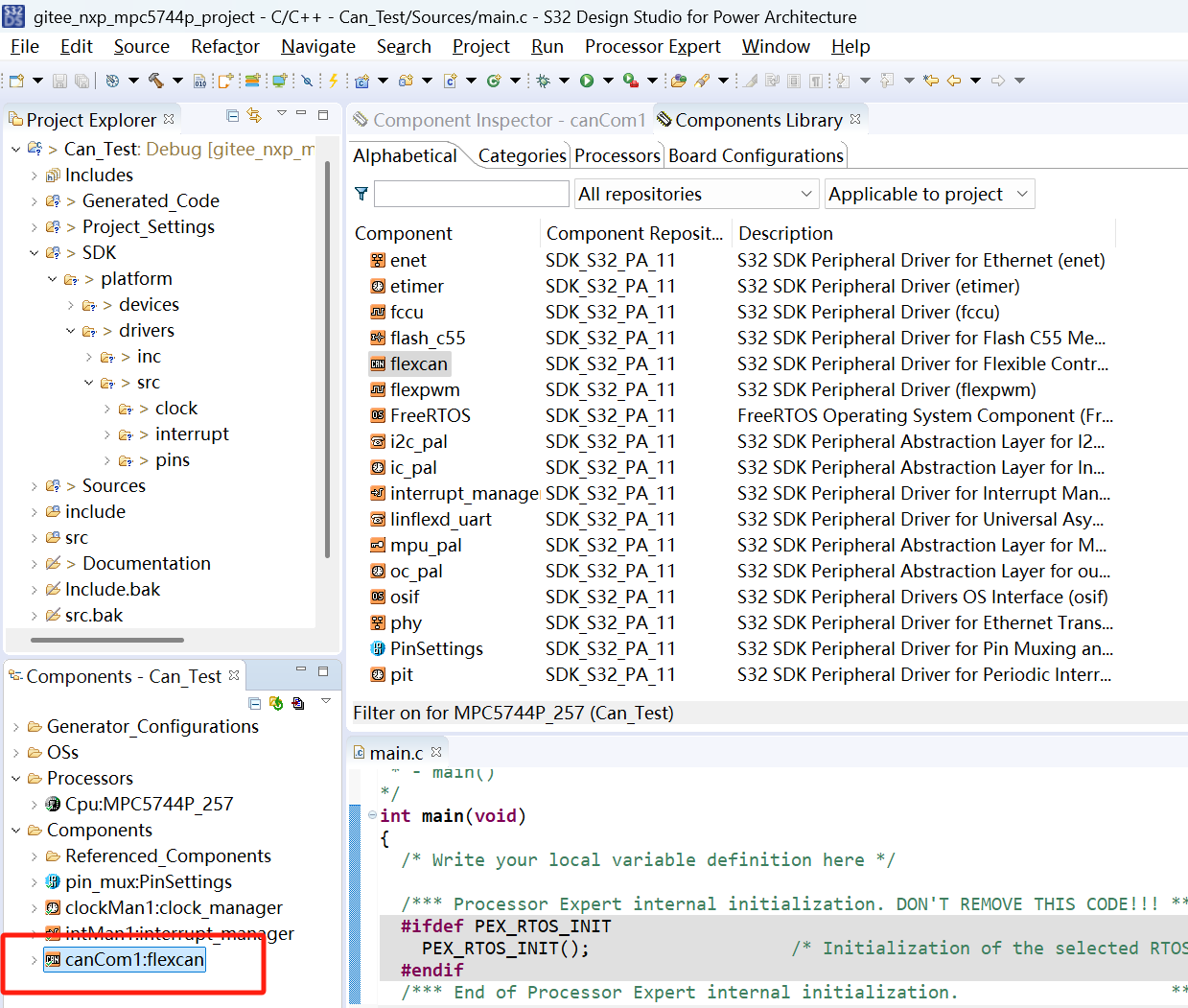
- 添加成功后,如下图。
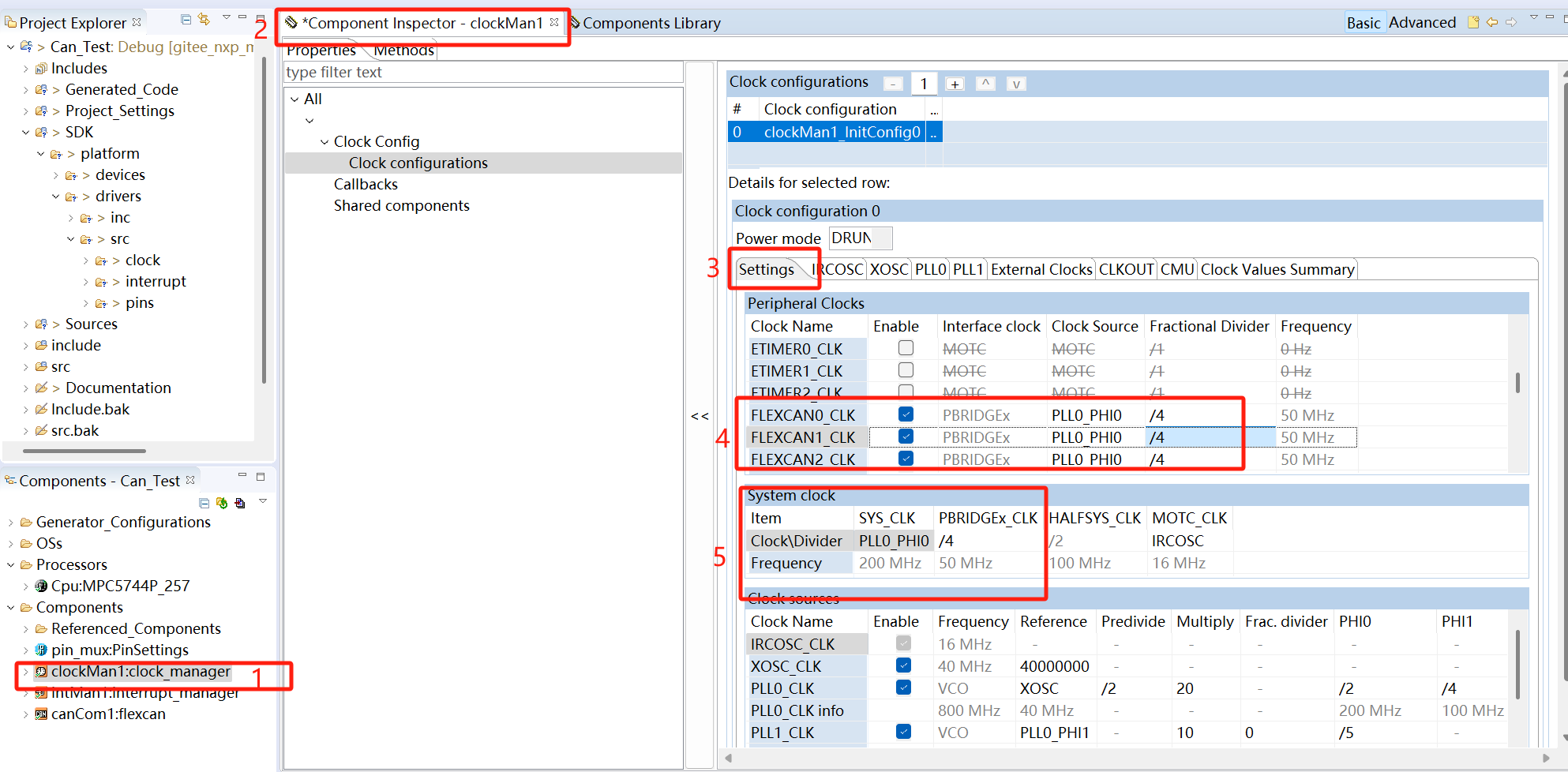
- 配置时钟,选中clockMain1,在Components Inspector -> clockMain1 -> Clock configurations -> Settings中,将CAN接口时钟和外设桥时钟设为50MHz。
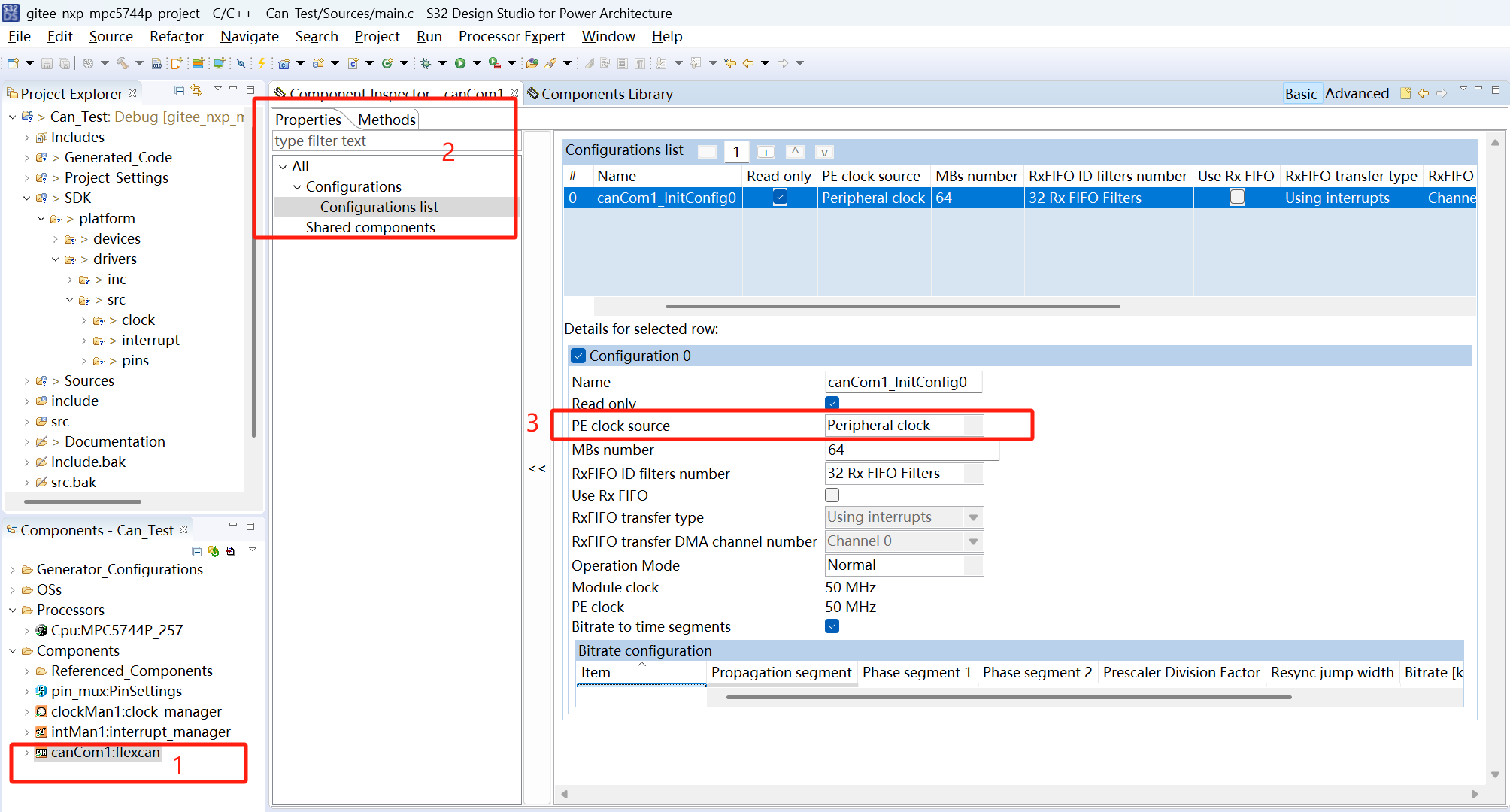
- 配置CAN,选中canCom1,在Components Inspector -> canCom1 -> Configuration list中,我们将PE clock source选择为Peripheral clock。其他的一些属性可以根据需求设置。此时采用默认配置,并且默认的CAN波特率为500Kbps。
三、代码生成
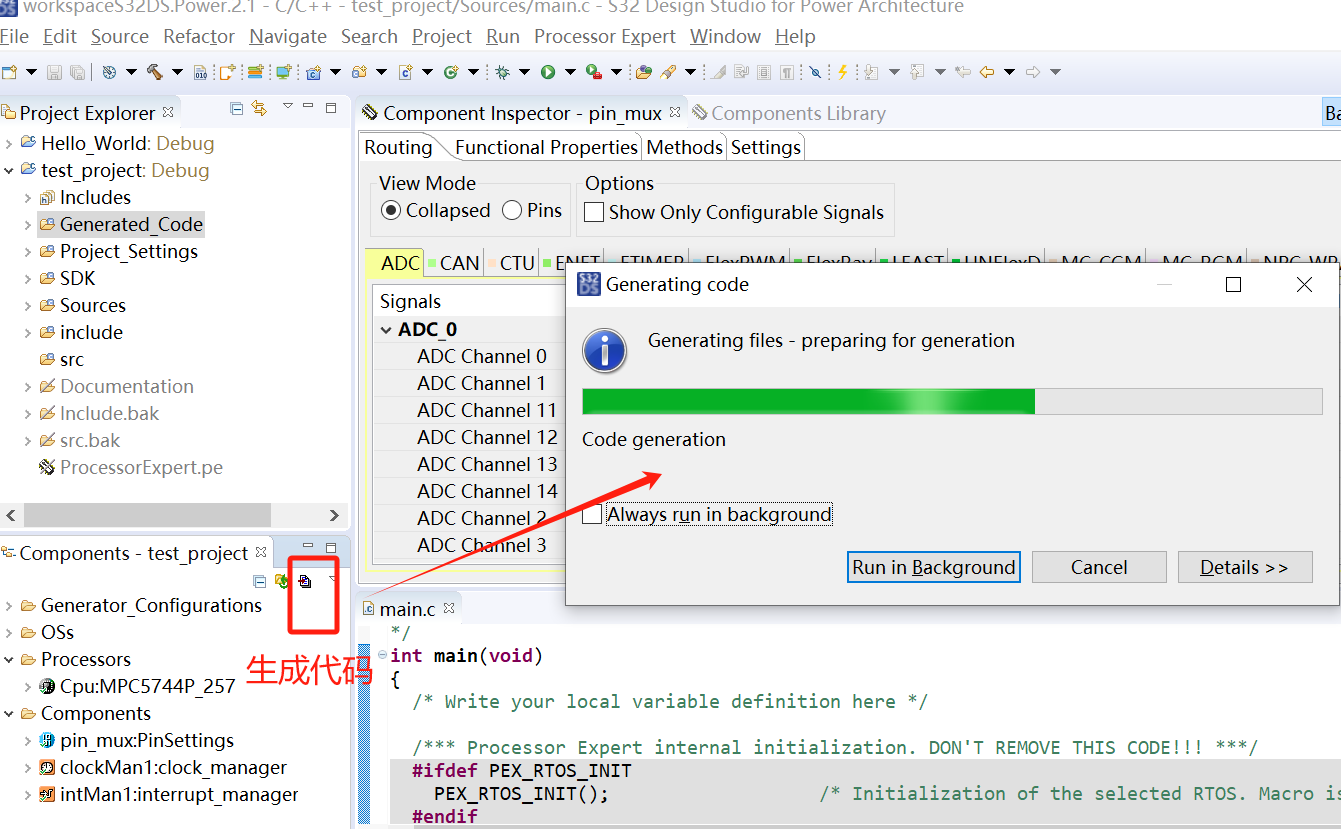
- 配置完成并保存后,开始生成对应配置的驱动代码。点击Components区的生成代码按钮,开始生成代码。
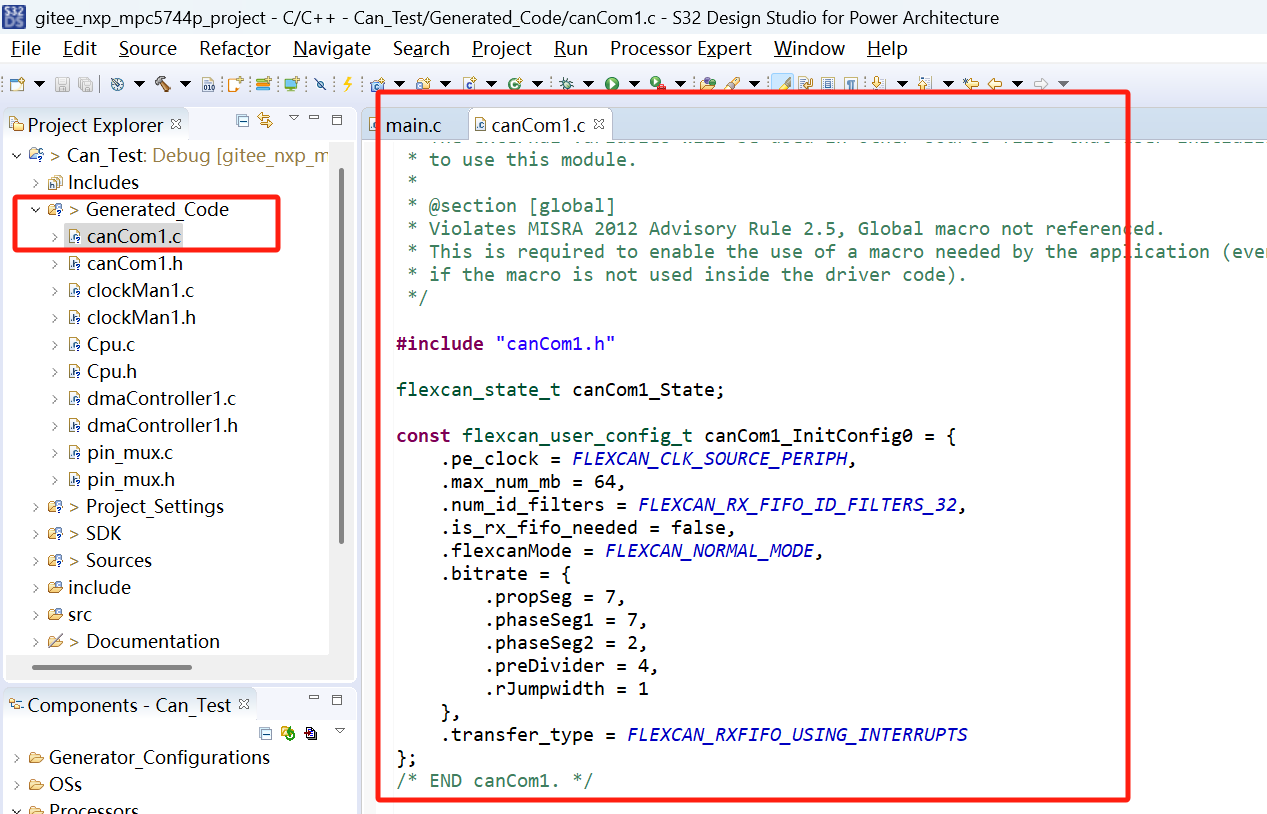
- 代码生成成功,如下图。刚才配置了1个CAN,这里就有了对1个CAN接口配置数组。
四、代码调用
- 驱动代码生成后,我们需要在main.c中调用生成的驱动代码,才能够实现功能。具体的sdk的can驱动api接口在如下图所示文件夹中,我们可以根据该api接口进行功能实现。

- main.c代码示例:
/*
* Copyright (c) 2013 - 2015, Freescale Semiconductor, Inc.
* Copyright 2016-2017 NXP
* All rights reserved.
*
* THIS SOFTWARE IS PROVIDED BY NXP "AS IS" AND ANY EXPRESSED OR
* IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES
* OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED.
* IN NO EVENT SHALL NXP OR ITS CONTRIBUTORS BE LIABLE FOR ANY DIRECT,
* INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES
* (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
* SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
* HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT,
* STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING
* IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF
* THE POSSIBILITY OF SUCH DAMAGE.
*/
/* ###################################################################
** Filename : main.c
** Processor : MPC574xP
** Abstract :
** Main module.
** This module contains user's application code.
** Settings :
** Contents :
** No public methods
**
** ###################################################################*/
/*!
** @file main.c
** @version 01.00
** @brief
** Main module.
** This module contains user's application code.
*/
/*!
** @addtogroup main_module main module documentation
** @{
*/
/* MODULE main */
/* Including necessary module. Cpu.h contains other modules needed for compiling.*/
#include "Cpu.h"
volatile int exit_code = 0;
/* User includes (#include below this line is not maintained by Processor Expert) */
#define ReceiveCANID 0x00000215
#define SendCANID 0x00000215
uint8_t data[8];
void FlexCAN_Initial(void) {
uint32_t mailbox = 5;
FLEXCAN_DRV_Init(INST_CANCOM1, &canCom1_State, &canCom1_InitConfig0); //default is 500K init can0
flexcan_data_info_t dataInfo =
{ .data_length = 8U, .msg_id_type = FLEXCAN_MSG_ID_STD };
/* Configure RX message buffer with index RX_MSG_ID and RX_MAILBOX */
FLEXCAN_DRV_ConfigRxMb(INST_CANCOM1, mailbox, &dataInfo, ReceiveCANID);
}
void FlexCAN_SendData(uint8_t * data, uint32_t len) {
uint32_t mailbox = 0;
/* Set information about the data to be sent
* - 1 byte in length
* - Standard message ID
* - Bit rate switch enabled to use a different <u>bitrate</u> for the data
segment
* - Flexible data rate enabled
* - Use zeros for FD padding
*/
flexcan_data_info_t dataInfo =
{ .data_length = len, .msg_id_type = FLEXCAN_MSG_ID_STD };
/* Configure TX message buffer with index TX_MSG_ID and TX_MAILBOX*/
FLEXCAN_DRV_ConfigTxMb(INST_CANCOM1, mailbox, &dataInfo, SendCANID);
/* Execute send non-blocking */
FLEXCAN_DRV_Send(INST_CANCOM1, mailbox, &dataInfo, SendCANID, data);
}
uint8_t FlexCAN_ReceiveData(void) {
/* Define receive buffer */
flexcan_msgbuff_t recvBuff;
uint32_t mailbox = 5; //初始化时已设置接收邮箱为5
uint32_t status = 0;
status = ((CAN_0->IFLAG1) >> mailbox) & 0x01;
//MailBox is receive buffer
if (status != 1) {
return 0;
}
/* Start receiving data in RX_MAILBOX. */
FLEXCAN_DRV_Receive(INST_CANCOM1, mailbox, &recvBuff);
/* Wait until the previous FlexCAN receive is completed */
if (FLEXCAN_DRV_GetTransferStatus(INST_CANCOM1, mailbox)
== STATUS_SUCCESS) {
/* Check the received message ID and <u>payload</u> */
if (recvBuff.msgId == ReceiveCANID) {
uint8_t i;
for (i = 0; i < recvBuff.dataLen; i++)
data[i] = recvBuff.data[i];
return recvBuff.dataLen;
}
}
return 0;
}
void ReceiveCANData(void) {
uint8_t dataLen = 0;
uint8_t n = 2;
uint16_t recv_value, send_value;
if ((dataLen = FlexCAN_ReceiveData()) != 0) {
recv_value = data[0] * 256 + data[1];
send_value = recv_value * n - 8700 * (n - 1);
data[0] = send_value / 256;
data[1] = send_value % 256;
FlexCAN_SendData(data, dataLen);
}
}
/*!
\brief The main function for the project.
\details The startup initialization sequence is the following:
* - startup asm routine
* - main()
*/
int main(void) {
/* Write your local variable definition here */
/*** Processor Expert internal initialization. DON'T REMOVE THIS CODE!!! ***/
#ifdef PEX_RTOS_INIT
PEX_RTOS_INIT(); /* Initialization of the selected RTOS. Macro is defined by the RTOS component. */
#endif
/*** End of Processor Expert internal initialization. ***/
/* Write your code here */
/* For example: for(;;) { } */
CLOCK_DRV_Init(g_clockManConfigsArr[0]);
PINS_DRV_Init(NUM_OF_CONFIGURED_PINS, g_pin_mux_InitConfigArr);
FlexCAN_Initial();
uint32_t count = 0, cnt = 0;
uint8_t test_data[8] = { 0, 1, 2, 3, 4, 5, 6, 7 };
for (;;) {
count++;
if (count > 8000000) {
count = 0;
cnt++;
FlexCAN_SendData(test_data, 8);
test_data[0] = cnt;
if (cnt > 10) {
cnt = 0;
break;
}
}
};
for (;;) {
ReceiveCANData();
}
/*** Don't write any code pass this line, or it will be deleted during code generation. ***/
/*** RTOS startup code. Macro PEX_RTOS_START is defined by the RTOS component. DON'T MODIFY THIS CODE!!! ***/
#ifdef PEX_RTOS_START
PEX_RTOS_START(); /* Startup of the selected RTOS. Macro is defined by the RTOS component. */
#endif
/*** End of RTOS startup code. ***/
/*** Processor Expert end of main routine. DON'T MODIFY THIS CODE!!! ***/
for (;;) {
if (exit_code != 0) {
break;
}
}
return exit_code;
/*** Processor Expert end of main routine. DON'T WRITE CODE BELOW!!! ***/
} /*** End of main routine. DO NOT MODIFY THIS TEXT!!! ***/
/* END main */
/*!
** @}
*/
/*
** ###################################################################
**
** This file was created by Processor Expert 10.1 [05.21]
** for the NXP C55 series of microcontrollers.
**
** ###################################################################
*/
- 至此,main.c中已经将生成的CAN驱动代码调用起来了。我们可以将代码下载进开发板中,打开CANPro,设置波特率500Kbps,可以看到开发板会发出0x215报文出来,另外,我们下发0x215报文给开发板,开发板收到后会立即反馈一条0x215报文出来。


















 2463
2463

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











