




 本文介绍了如何使用NodeMcu V3 (ESP-12E)通过Arduino IDE读取和解析MPU6050的数据。首先,详细讲述了连接开发板、安装驱动和选择正确端口的步骤。接着,下载MPU6050库并进行烧录。在烧录后,利用串口监控器观察数据,并根据实际需求调整参数。目前应用了pitch和roll来处理场景,也可以进一步扩展利用cross值实现更多功能。
本文介绍了如何使用NodeMcu V3 (ESP-12E)通过Arduino IDE读取和解析MPU6050的数据。首先,详细讲述了连接开发板、安装驱动和选择正确端口的步骤。接着,下载MPU6050库并进行烧录。在烧录后,利用串口监控器观察数据,并根据实际需求调整参数。目前应用了pitch和roll来处理场景,也可以进一步扩展利用cross值实现更多功能。
NodeMcu V3 (ESP-12E)读取解析MPU6050
使用Arduino IDE 工具
1、使用数据线连接NodeMcu开发板

2、电脑安装驱动(如:CH340G / CP210x 根据所买开发板要求匹配,具体可问商家适应驱动),驱动安装成功后,在IDE中可选择端口 COM3 / COM5 ...... ,并且可以通过IDE获取开发板信息。其他因素:必须使用数据线,而非充电线!
3、开发板连接成功后,下载MPU6050库,如果有提示,则安装MPU6050所有库即可!

4、程序如下
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
#include <Wire.h>
const uint8_t scl = D6;
const uint8_t sda = D7;
Adafruit_MPU6050 mpu;
float i;//计算偏移量时的循环次数
float ax_offset = 0, ay_offset = 0; //x,y轴的加速度偏移量
float gx_offset = 0, gy_offset = 0; //x,y轴的角速度偏移量
float rad2deg = 57.29578;
float roll, pitch; //储存角度
float count =0;//计数
void setup(void) {
Serial.begin(115200);
Wire.begin(sda, scl);
while (!Serial)
delay(10);
Serial.println("Adafruit MPU6050 test!");
// Try to initialize!
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found!");
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
Serial.print("Accelerometer range set to: ");
switch (mpu.getAccelerometerRange()) {
case MPU6050_RANGE_2_G:
Serial.println("+-2G");
break;
case MPU6050_RANGE_4_G:
Serial.println("+-4G");
break;
case MPU6050_RANGE_8_G:
Serial.println("+-8G");
break;
case MPU6050_RANGE_16_G:
Serial.println("+-16G");
break;
}
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
Serial.print("Gyro range set to: ");
switch (mpu.getGyroRange()) {
case MPU6050_RANGE_250_DEG:
Serial.println("+- 250 deg/s");
break;
case MPU6050_RANGE_500_DEG:
Serial.println("+- 500 deg/s");
break;
case MPU6050_RANGE_1000_DEG:
Serial.println("+- 1000 deg/s");
break;
case MPU6050_RANGE_2000_DEG:
Serial.println("+- 2000 deg/s");
break;
}
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
Serial.print("Filter bandwidth set to: ");
switch (mpu.getFilterBandwidth()) {
case MPU6050_BAND_260_HZ:
Serial.println("260 Hz");
break;
case MPU6050_BAND_184_HZ:
Serial.println("184 Hz");
break;
case MPU6050_BAND_94_HZ:
Serial.println("94 Hz");
break;
case MPU6050_BAND_44_HZ:
Serial.println("44 Hz");
break;
case MPU6050_BAND_21_HZ:
Serial.println("21 Hz");
break;
case MPU6050_BAND_10_HZ:
Serial.println("10 Hz");
break;
case MPU6050_BAND_5_HZ:
Serial.println("5 Hz");
break;
}
Serial.println("");
delay(100);
}
void loop() {
count++;
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
int pitch = (atan2(a.acceleration.x, sqrt(a.acceleration.y*a.acceleration.y + a.acceleration.z*a.acceleration.z))*180.0)/M_PI;
int roll = (atan2(a.acceleration.y, a.acceleration.z)*180.0)/M_PI;
int cross = (atan2(a.acceleration.z, a.acceleration.y)*180.0)/M_PI;
Serial.print("俯仰x轴变 pitch: ");
Serial.print(pitch);
Serial.print(",横滚y轴变 roll: ");
Serial.print(roll);
Serial.print(",斜滚xy交叉轴变 cross: ");
Serial.print(cross);
Serial.print(" ");
if(pitch<-5&&roll<2){
Serial.println("前进");
}else if( pitch>5&&roll>0){
Serial.println("后退");
}else if(pitch<5&&roll<-5){
Serial.println("向左");
}else if(pitch>-5&&roll>5){
Serial.println("向右");
}else{
Serial.println("停止");
}
/* Print out the values */
Serial.print("加速度 X: ");
Serial.print(a.acceleration.x);
Serial.print(", Y: ");
Serial.print(a.acceleration.y);
Serial.print(", Z: ");
Serial.print(a.acceleration.z);
Serial.println(" m/s^2");
Serial.print("角速度 X: ");
Serial.print(g.gyro.x);
Serial.print(", Y: ");
Serial.print(g.gyro.y);
Serial.print(", Z: ");
Serial.print(g.gyro.z);
Serial.println(" rad/s");
/*Serial.print("Temperature: ");
Serial.print(temp.temperature);
Serial.println(" degC");*/
Serial.print("》》》》》第");
Serial.print(count);
Serial.println("次 结束《《《《《");
delay(500);
}
5、烧录(也可以先验证)
6、烧录后,可通过串口监控器查看
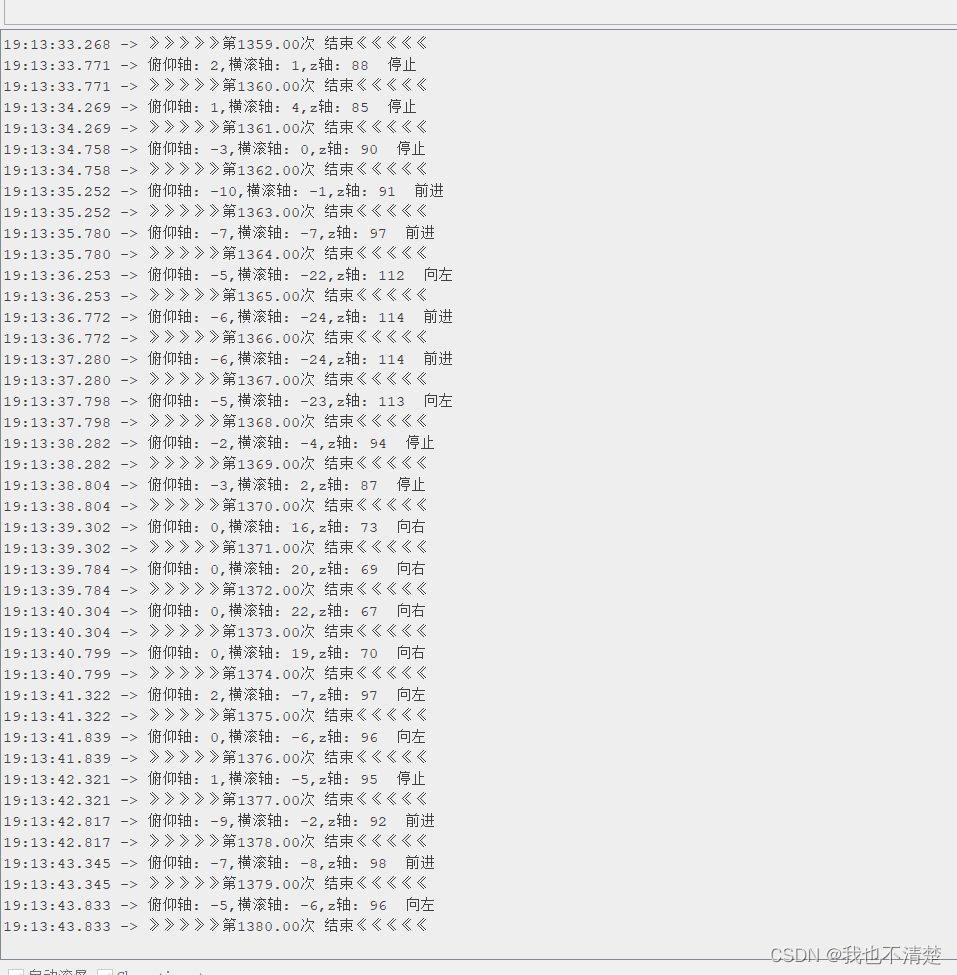
7、可根据实测需求调整参数范围
if(pitch<-5&&roll<2){
Serial.println("前进");
}else if( pitch>5&&roll>0){
Serial.println("后退");
}else if(pitch<5&&roll<-5){
Serial.println("向左");
}else if(pitch>-5&&roll>5){
Serial.println("向右");
}else{
Serial.println("停止");
}
8、目前使用pitch 和 roll处理4个场景,也可以把 cross 值作为条件,延伸更多场景
int pitch = (atan2(a.acceleration.x, sqrt(a.acceleration.y*a.acceleration.y + a.acceleration.z*a.acceleration.z))*180.0)/M_PI;
int roll = (atan2(a.acceleration.y, a.acceleration.z)*180.0)/M_PI;
int cross = (atan2(a.acceleration.z, a.acceleration.y)*180.0)/M_PI;
9、MPU6050原始数据 加速度、角速度、温度:
Serial.print("加速度 X: ");
Serial.print(a.acceleration.x);
Serial.print(", Y: ");
Serial.print(a.acceleration.y);
Serial.print(", Z: ");
Serial.print(a.acceleration.z);
Serial.println(" m/s^2");
Serial.print("角速度 X: ");
Serial.print(g.gyro.x);
Serial.print(", Y: ");
Serial.print(g.gyro.y);
Serial.print(", Z: ");
Serial.print(g.gyro.z);
Serial.println(" rad/s");
Serial.print("Temperature: ");
Serial.print(temp.temperature);
Serial.println(" degC");



















 559
559

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











