







 滑模观测器是一种动态系统,用于估计未知状态变量。它通过非线性高增益反馈来逼近超平面,实现状态估计,并在控制工程中广泛应用,如扰动补偿。文中以带有扰动的二阶系统为例,详细介绍了滑模观测器的设计过程和收敛条件。
滑模观测器是一种动态系统,用于估计未知状态变量。它通过非线性高增益反馈来逼近超平面,实现状态估计,并在控制工程中广泛应用,如扰动补偿。文中以带有扰动的二阶系统为例,详细介绍了滑模观测器的设计过程和收敛条件。
什么是滑模观测器
1、 滑模观测器是一类动态系统。
2、滑模观测器是指根据系统的外部变量(输入变量和输出变量)的实测值得出状态变量估计值的一类动态系统,也称为状态重构器。
3、作用:
(1)滑模观测器不但为状态反馈的技术实现提供了实际可能性,而且在控制工程的许多方面也得到了实际应用,例如复制扰动以实现对扰动的完全补偿等。
(2)滑模观测器通过测量实际系统的输入输出,可以得到给定系统内部状态的估计值。
(3)滑模观测器使用非线性高增益反馈迫使估计状态逼近超平面,使估计输出等同于测量输出。
例子
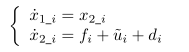
对于一个典型的带有扰动的二阶系统,其中di{d_{i}}di有一阶导数,d˙i\dot d _{i}d˙i有界且−L<d˙i<L{-L<\dot d _{i}}<L−L<d˙i<L
令扰动观测器为

其中
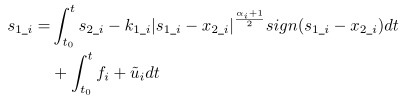
其中0<αi<1{0<\alpha _{i}}<10<αi
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 5663
5663

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









