




1、主要参考
(1)
CartPole 强化学习详解1 - DQN_Oxalate-c的博客-优快云博客
(2)官方文档,推荐!!!!
Cart Pole - Gymnasium Documentation
2、相关说明
2.1 动作空间
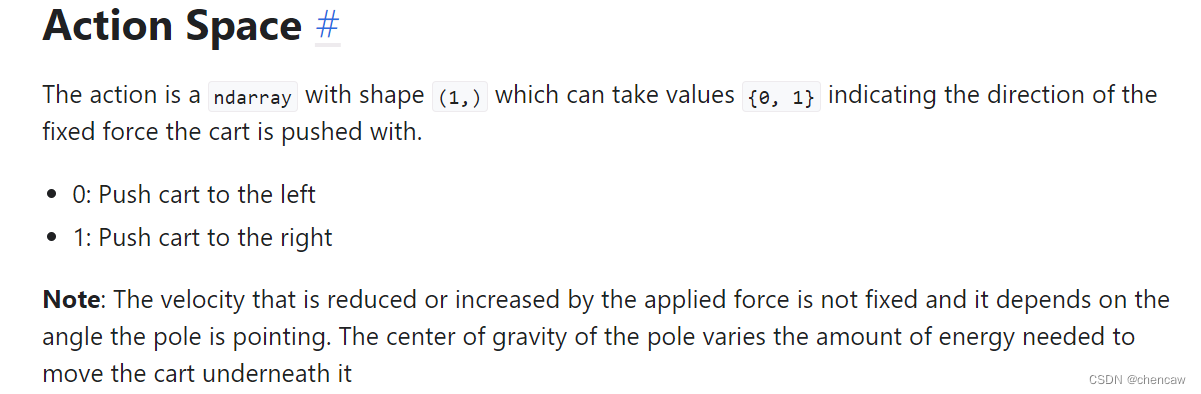
取值{0,1},表示推车被推的固定力的方向。
注:所施加的力所减少或增加的速度不是固定的,它取决于杆指向的角度。杆子的重心改变了移动它下面的小车所需的能量。
原文:
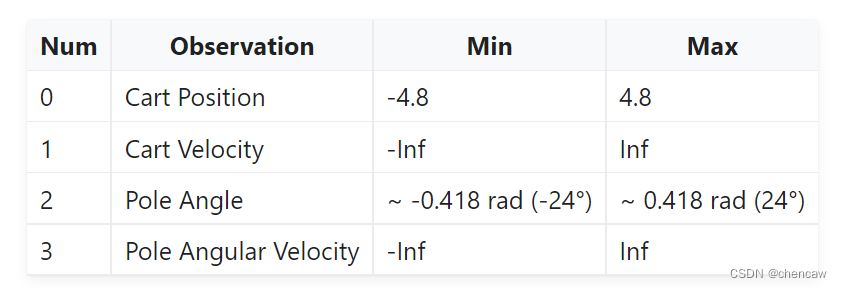
2.2 观察空间
观察空间是一个4维的数据
注:
 文章介绍了CartPole环境的详细规则,包括动作空间、观察空间、奖励机制和游戏结束条件。通过DQN的强化学习方法和基于PID的传统控制策略对杆子保持直立进行了探讨,提供了相应的Python代码示例,展示了两种不同的控制实现,其中PID控制能运行较长时间,而直接根据角度决策的控制策略在简单场景下也有效。
文章介绍了CartPole环境的详细规则,包括动作空间、观察空间、奖励机制和游戏结束条件。通过DQN的强化学习方法和基于PID的传统控制策略对杆子保持直立进行了探讨,提供了相应的Python代码示例,展示了两种不同的控制实现,其中PID控制能运行较长时间,而直接根据角度决策的控制策略在简单场景下也有效。
(1)
CartPole 强化学习详解1 - DQN_Oxalate-c的博客-优快云博客
(2)官方文档,推荐!!!!
Cart Pole - Gymnasium Documentation
取值{0,1},表示推车被推的固定力的方向。
注:所施加的力所减少或增加的速度不是固定的,它取决于杆指向的角度。杆子的重心改变了移动它下面的小车所需的能量。
原文:
观察空间是一个4维的数据
注:
 1005
634
713
1322
1342
1005
634
713
1322
1342

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























