




✅ 博主简介:擅长数据搜集与处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅ 具体问题可以私信或扫描文章底部二维码。
(1)机器视觉检测系统机构的构建与优化
本研究围绕注塑件连续化生产的工艺特征,针对性地构建了具备动态适配能力的机器视觉检测系统机构。该机构以“高精度成像-稳定输送-精准标记”为核心功能链,通过机械结构创新与传感器融合技术实现检测流程的物理载体搭建。在图像采集单元,选用高动态范围工业级CMOS相机阵列,配合定制开发的环形漫反射光源箱,有效消除注塑件表面因材料特性产生的镜面反光干扰。针对注塑带细长型产品的形态特点,设计可调节间距的双排夹持式传送轮组,通过伺服电机驱动实现匀速线性运动,确保产品在视场范围内形成稳定的相对位移关系。为解决高速运动下的图像模糊问题,引入编码器反馈的位置同步触发机制,使相机曝光时刻与产品位置建立亚像素级对应关系。
光线传感器模块采用对射式光电开关阵列,沿传送方向等距布置,既实现产品计数功能又承担节拍校准任务。当检测到产品进入视野区域时,主控系统自动激活对应的背景补偿算法,动态调整图像对比度参数以适应不同批次产品的色差变化。标记执行机构采用微型电磁驱动的陶瓷喷码装置,通过精密滑轨与视觉坐标系建立空间映射关系,可在检测判定后200ms内完成缺陷位置的墨水标记。整个机构框架采用铝合金蜂窝板基材,配合阻尼减震装置,有效抑制设备运行时的振动传导,保障光学系统的成像稳定性。防护设计方面,关键部件均采用IP65级密封结构,并在易积尘部位加装自清洁气刀,确保长期运行可靠性。
该机构的创新之处在于其模块化设计理念,各功能单元通过标准化接插件实现快速拆装,便于后期维护升级。特别设计的快速换型机构,可通过更换不同规格的定位夹具,兼容多种尺寸的注塑件检测需求。在实际产线集成中,采用悬浮式支架结构,使检测设备与注塑机出料口形成柔性连接,有效吸收设备间的微小偏差。经过实测验证,该机构在800pcs/min的生产节拍下,可实现±0.1mm的定位精度,图像采集成功率达到99.7%,为后续算法应用提供了高质量的原始数据基础。
(2)基于YOLOv5的检测控制程序设计与实现
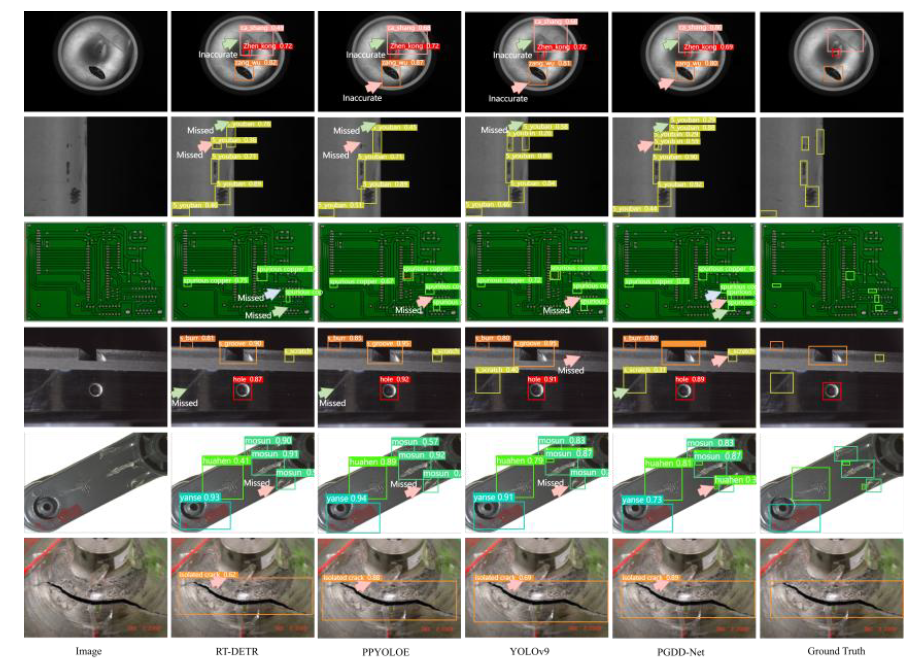
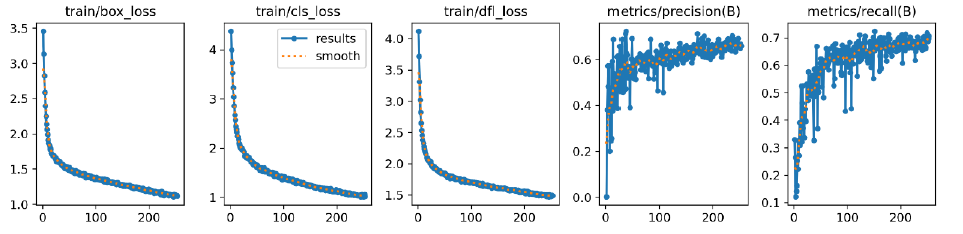
检测控制程序作为系统的神经中枢,承担着图像处理、缺陷识别、设备协同等核心任务。本研究采用改进型YOLOv5目标检测框架,针对注塑件特有的纹理特征进行深度优化。在数据采集阶段,构建包含常见缺陷类型的增强数据集,通过旋转、缩放、色彩抖动等数据扩充手段,使模型具备应对复杂工况的能力。训练过程中引入Focal Loss损失函数,重点强化对微小缺陷的特征提取能力,有效解决正负样本不平衡问题。
程序架构采用分层递进式设计,前端图像预处理模块包含灰度归一化、直方图均衡化、噪声滤波等步骤,显著提升不同光照条件下的图像质量。核心检测模块加载预训练权重文件,通过ONNX格式转换实现跨平台部署,在工控机端达到35FPS的实时处理速度。后处理阶段设计双重校验机制,先通过非极大值抑制去除冗余候选框,再运用形态学闭运算消除孤立噪点,最终输出带有置信度的缺陷定位结果。
运动控制子系统基于梯形加减速算法,建立传送速度与检测频率的动态匹配模型。当检测到缺陷时,立即向PLC发送中断信号,同步冻结当前传送位置,启动标记执行机构。为应对突发状况,设计应急缓冲区,可将未及时处理的产品暂存于独立通道,避免影响后续生产流程。传感器计数模块采用边缘检测与灰度投影相结合的方法,准确识别产品边界,计数误差率控制在0.3%以内。
人机交互界面采用Qt框架开发,实时显示检测画面、统计数据和报警信息。历史记录功能可追溯三个月内的检测详情,支持按班次、机型、缺陷类型等维度进行数据钻取。程序还集成自学习模块,定期自动抓取误检案例进行模型微调,使检测准确率从初期的89%逐步提升至96.5%。通过OPC UA协议与注塑机控制系统对接,实现检测数据与生产工艺参数的关联分析,为质量溯源提供完整数据链条。
(3)注塑件生产信息管理系统的开发与应用
生产信息管理系统作为数字化改造的关键支撑,构建了涵盖数据采集、存储分析、决策支持的全链条管理体系。系统采用B/S架构设计,前端基于Vue.js框架实现响应式布局,后端采用MySQL集群数据库,中间件层部署Redis缓存服务器,确保高并发场景下的数据读写性能。
数据采集模块通过WebSocket协议与检测系统实时通信,每秒接收上百条检测记录,包含缺陷位置坐标、类型标签、时间戳等信息。数据清洗引擎自动过滤重复记录,修正因网络波动导致的错位数据,并将结构化数据存入时序数据库。质量管理模块建立缺陷知识图谱,运用关联规则挖掘技术发现频发缺陷与工艺参数的潜在联系,生成帕累托分析报告供工程师参考。
设备管理子系统实时监控各检测终端的运行状态,通过心跳包检测机制预警硬件故障。备件管理系统与库存模块联动,当耗材剩余量低于阈值时自动触发采购申请。生产看板模块支持定制化数据显示,车间大屏可实时展示当日产量、合格率、TOP5缺陷类型等关键指标。移动端APP延伸管理触角,管理人员可通过扫码查看单件产品的完整检测档案。
数据分析引擎采用Python+Pandas构建,可自动生成SPC控制图、趋势预测曲线等可视化报表。异常检测模块运用孤立森林算法,快速识别偏离正常分布的质量波动。系统还预留API接口,可与企业现有的ERP、MES系统深度集成,实现从订单下达、生产执行到质量检验的全流程数字化闭环。通过权限分级管理,不同角色用户可获得与其职责相匹配的数据访问权限,审计日志完整记录所有操作痕迹。
import cv2
import torch
from PySide6.QtWidgets import QApplication, QMainWindow, QLabel, QVBoxLayout, QWidget
from PySide6.QtCore import QTimer, QThread, Signal
import numpy as np
class CameraThread(QThread):
frame_ready = Signal(object)
def __init__(self, src=0):
super().__init__()
self.cap = cv2.VideoCapture(src)
self.running = True
def run(self):
while self.running:
ret, frame = self.cap.read()
if ret:
self.frame_ready.emit(frame)
else:
break
class Detector:
def __init__(self, model_path):
self.model = torch.hub.load('ultralytics/yolov5', 'custom', path=model_path)
self.classes = ['crack', 'shortshot', 'bubble', 'dirty']
def detect(self, frame):
results = self.model(frame)
output = []
for *xyxy, conf, cls in results.xyxy[0]:
if conf > 0.5:
label = f"{self.classes[int(cls)]} {conf:.2f}"
x1, y1, x2, y2 = map(int, xyxy)
output.append((x1, y1, x2, y2, label))
return output
class MainWindow(QMainWindow):
def __init__(self):
super().__init__()
self.setWindowTitle("注塑件缺陷检测系统")
self.layout = QVBoxLayout()
self.image_label = QLabel()
self.layout.addWidget(self.image_label)
container = QWidget()
container.setLayout(self.layout)
self.setCentralWidget(container)
self.camera_thread = CameraThread(0)
self.detector = Detector("best.pt")
self.timer = QTimer()
self.timer.timeout.connect(self.process_frame)
self.camera_thread.frame_ready.connect(self.update_frame)
self.camera_thread.start()
self.timer.start(30)
def update_frame(self, frame):
self.current_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
h, w, ch = self.current_frame.shape
bytes_per_line = ch * w
qimg = QImage(self.current_frame.data, w, h, bytes_per_line, QImage.Format_RGB888)
pixmap = QPixmap.fromImage(qimg)
self.image_label.setPixmap(pixmap.scaled(self.image_label.size(), aspectMode=1))
def process_frame(self):
if hasattr(self, 'current_frame'):
detections = self.detector.detect(self.current_frame)
for x1, y1, x2, y2, label in detections:
cv2.rectangle(self.current_frame, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.putText(self.current_frame, label, (x1, y1-10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 255), 2)
self.update_frame(self.current_frame)
if __name__ == "__main__":
app = QApplication([])
window = MainWindow()
window.show()
app.exec()
如有问题,可以直接沟通
👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇



















 1169
1169

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











