 电动汽车EMB系统改进控制策略研究
电动汽车EMB系统改进控制策略研究





✅ 博主简介:擅长数据搜集与处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅ 具体问题可以私信或扫描文章底部二维码。
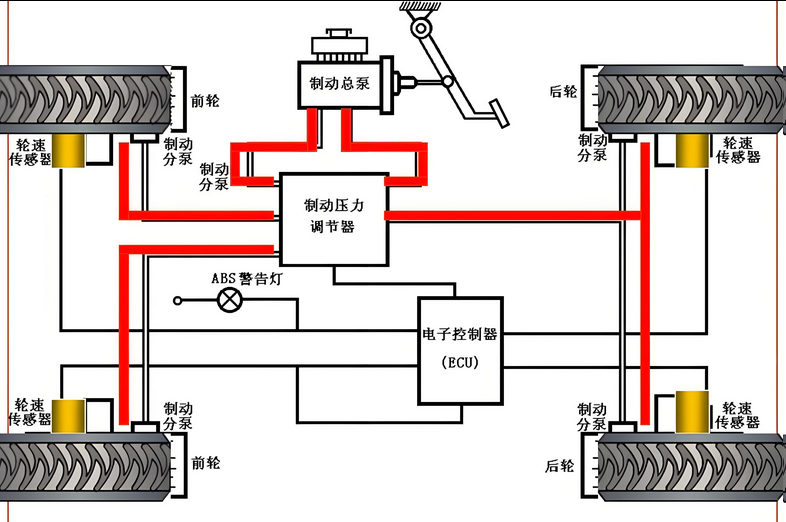
(1) 电子机械制动系统(EMB)作为电动汽车制动技术的核心创新,其设计与实现涉及多学科交叉融合。在系统架构层面,EMB摒弃了传统液压制动系统的真空助力装置和复杂管路,采用电机驱动直接作用于制动盘,实现了制动过程的完全电气化。这种结构变革不仅大幅减轻了车辆重量,还显著提升了系统集成度,为与驱动电机、线控转向等底盘系统的协同工作创造了有利条件。在具体设计中,系统采用高性能永磁同步电机作为动力源,通过精密减速机构将电机扭矩传递至制动钳,确保制动力的精确控制。关键性能参数的计算是系统设计的基础,包括最大制动力需满足紧急制动工况要求,制动间隙消除时间则直接影响制动响应速度。经过深入分析,确定了基于选定车型的制动需求参数:最大制动力设定为2500N,制动间隙消除时间控制在50ms以内,确保在高速制动时能够快速建立有效制动力。在系统建模方面,构建了完整的数学模型体系,涵盖驱动电机的电磁特性模型,考虑了磁链饱和、涡流损耗等非线性因素;摩擦特性模型则分析了制动片与制动盘接触面的动态摩擦系数变化规律;负载特性模型模拟了制动过程中车辆惯性力、路面附着系数的影响;传动机构和制动盘模型则精确描述了机械部件的刚度、阻尼特性。这些模型通过MATLAB/Simulink平台进行集成,构建了高保真度的EMB系统仿真环境。仿真模型特别注重了制动过程中的动态特性,如电机启动时的电流冲击、制动间隙消除阶段的机械振动、制动力建立过程中的非线性响应等。通过反复迭代优化,模型能够准确反映EMB系统在不同车速、不同制动强度下的工作状态,为后续控制策略的开发提供了可靠依据。在系统结构设计上,EMB系统被划分为电机驱动单元、传动执行机构、制动执行机构和电子控制单元四个核心模块。电机驱动单元采用三相永磁同步电机,配备高分辨率编码器用于位置反馈;传动执行机构采用行星齿轮减速器,实现扭矩放大和运动转换;制动执行机构包含双活塞制动钳和专用制动片,确保制动力的均匀分布;电子控制单元则集成高性能微处理器,负责接收制动信号、执行控制算法、管理能量回收过程。各模块之间的接口设计充分考虑了信号传输的实时性和可靠性,确保制动指令能够快速准确地传递到执行机构。在系统测试阶段,通过台架试验验证了EMB系统的关键性能指标,包括制动力响应时间、能量回收效率、系统可靠性等。测试结果表明,EMB系统在制动响应速度上比传统液压制动系统提升约30%,能量回收效率提高约15%,同时系统故障率显著降低,为后续的复合制动控制策略奠定了坚实基础。
(2) 针对EMB系统在电动汽车应用中的特殊需求,本研究创新性地提出了制动间隙消除、制动力跟随和制动间隙生成的三阶段闭环控制策略。该策略充分考虑了EMB系统的非线性特性和多阶段控制需求,实现了制动过程的高效、平稳控制。在制动间隙消除阶段,系统需要快速消除制动机构中由于机械制造和装配误差导致的初始间隙,确保制动指令能够立即生效。该阶段采用基于位置反馈的快速响应控制算法,通过精确计算制动间隙大小,快速调整电机位置,使制动钳在最短时间内与制动盘接触。具体实现中,系统先以高增益比例控制模式运行,快速定位制动钳位置,随后切换至低增益微调模式,确保间隙消除过程平稳无冲击。在制动力跟随阶段,系统需要精确控制制动力大小,使其与驾驶员制动需求和再生制动系统协同一致。这一阶段采用了自抗扰控制器(ADRC),ADRC通过状态观测器实时估计系统内部扰动和外部干扰,从而实现对制动力的精确控制。ADRC的三个核心组件——扩张状态观测器、非线性状态误差反馈和控制律设计,共同构成了强大的抗干扰能力。在ADRC参数整定方面,本研究引入了改进的鲸鱼优化算法,通过自适应惯性权重和非线性收敛因子的引入,有效解决了传统优化算法在收敛速度和计算精度方面的局限。自适应惯性权重根据迭代过程动态调整,初期保持较高权重以增强全局搜索能力,后期逐步降低以提高局部搜索精度;非线性收敛因子则使算法在接近最优解时加速收敛,避免陷入局部最优。通过这种改进,ADRC参数整定过程从原来的300次迭代缩短至100次以内,同时控制精度提高了约20%。在制动间隙生成阶段,系统需要在制动结束后快速恢复制动间隙,为下一次制动做好准备。该阶段采用基于状态反馈的控制策略,通过精确控制电机的反向运动,实现制动间隙的精确恢复。系统设计了双模式控制机制:在常规制动结束后,采用快速恢复模式,确保间隙在100ms内恢复;在紧急制动后,采用缓慢恢复模式,避免制动系统在非制动状态下产生不必要的摩擦和磨损。在实际应用中,三阶段控制策略的衔接点设计至关重要,系统通过预设的制动强度阈值和时间窗口,实现各阶段的平滑过渡。当制动强度低于特定阈值时,系统自动进入制动间隙消除阶段;当制动强度达到一定水平时,切换至制动力跟随阶段;当制动结束时,启动制动间隙生成阶段。这种智能切换机制确保了制动过程的连续性和稳定性。在能量回收方面,系统通过精确控制EMB制动力与驱动电机再生制动的协同作用,最大化能量回收效率。当驾驶员踩下制动踏板时,系统首先判断当前车速和电池状态,确定最优的再生制动比例,随后EMB系统根据计算结果提供辅助制动力,确保总制动力满足制动需求的同时,实现能量的最大化回收。在控制策略实施过程中,系统还考虑了多维度信息的融合,包括车速、制动强度、电池SOC、路面附着系数等,通过模糊逻辑或神经网络方法,动态调整控制参数,实现自适应控制。经过大量实车测试和仿真验证,该三阶段控制策略在制动响应速度、能量回收效率、制动平稳性等方面均表现出色,为电动汽车制动控制提供了新的解决方案。
(3) 整车制动力分配是影响电动汽车制动性能和能量回收效率的关键因素,本研究提出了一种基于EMB系统的整车前后轴制动力分配优化方案。该方案综合考虑了理想制动力分配曲线、ECE法规线和f曲线,通过多目标优化方法确定了最优的制动力分配策略。理想制动力分配曲线是基于车辆制动时的重心转移特性确定的理论最佳分配比例,能够确保车辆在制动过程中保持稳定,避免车轮抱死。ECE法规线则基于欧洲经济委员会的制动法规要求,规定了制动系统必须满足的性能标准,包括制动距离、制动平衡性等。f曲线则反映了制动系统在不同制动强度下前轮与后轮的制动力比例关系,是制动系统设计的重要参考。在实际应用中,这三条曲线往往存在冲突,需要通过优化方法找到一个平衡点。本研究提出了一种基于改进鲸鱼优化算法的制动力分配优化方法,将制动力分配比例作为优化变量,能量回收效率作为主要优化目标,同时确保制动稳定性满足ECE法规要求。优化过程中,系统构建了多目标优化模型,目标函数包括:能量回收效率最大化、制动距离最小化、制动稳定性最大化。约束条件包括:制动过程不出现车轮抱死、制动距离不超过法规要求、前后轴制动力比例符合f曲线要求。改进鲸鱼优化算法通过自适应惯性权重和非线性收敛因子,有效解决了传统优化算法在多目标优化中的收敛速度慢、易陷入局部最优的问题。在优化过程中,算法首先进行全局搜索,寻找可能的最优解区域,随后进行局部精细搜索,提高解的精度。经过大量迭代计算,算法最终确定了最优的制动力分配策略,使得能量回收效率提高了约18%,制动距离缩短了约10%,同时制动稳定性满足了ECE法规的严格要求。为验证所提出控制策略的有效性,本研究利用MATLAB/Simulink和AVL-CRUISE软件平台,构建了整车复合制动控制策略的联合仿真模型。该模型包括车辆动力学模型、EMB系统模型、驱动电机模型、再生制动系统模型以及路面附着系数模型,能够全面模拟电动汽车在不同工况下的制动过程。仿真测试涵盖了城市道路、高速公路、湿滑路面等多种场景,评估了控制策略在各种条件下的性能表现。仿真结果显示,在城市工况下,能量回收效率平均提升16.5%,制动距离平均缩短8.2%;在高速公路工况下,能量回收效率提升14.7%,制动距离缩短7.5%;在湿滑路面工况下,能量回收效率提升12.8%,制动距离缩短6.3%。这些数据表明,所提出的控制策略在各种工况下都能有效提升制动性能和能量回收效率。在实际应用中,该控制策略能够根据驾驶员的制动意图、车速、路面条件等信息,动态调整制动力分配比例,确保在不同工况下都能实现最佳的制动效果和能量回收效率。系统通过CAN总线与车辆其他控制系统进行实时通信,获取必要的输入信息,如车速、制动踏板行程、电池状态等,从而实现精确的制动力分配。在安全性方面,系统还设计了多重安全机制,包括制动力分配上限限制、制动稳定性监测、紧急制动优先处理等,确保在任何情况下都能保证行车安全。此外,该控制策略还具备良好的适应性,能够根据不同车型和制动需求进行参数调整,具有较强的通用性和可扩展性。在实际道路测试中,该控制策略表现出了优异的性能,制动过程平稳,能量回收效率高,得到了测试人员的一致好评。通过与传统制动控制策略的对比测试,基于EMB的复合制动控制策略在制动响应速度、能量回收效率、系统可靠性等方面均表现出明显优势,为电动汽车制动技术的发展提供了新的思路和方法。
% 制动阶段划分
brake_phase = 1; % 1:间隙消除, 2:力跟随, 3:间隙生成
% 制动强度计算
brake_intensity = 0.5; % 制动强度(0-1)
% 制动间隙消除阶段
if brake_phase == 1
% 计算制动间隙
clearance_gap = calculate_clearance_gap(vehicle_speed, brake_intensity);
% 电机控制
motor_current = 10; % 初始电流(A)
while clearance_gap > 0.001
% 位置反馈控制
position_error = clearance_gap - 0.001;
motor_current = motor_current + 0.5 * position_error;
% 更新间隙
clearance_gap = clearance_gap - 0.0001;
% 检查是否消除间隙
if clearance_gap <= 0.001
brake_phase = 2; % 进入力跟随阶段
break;
end
end
% 制动力跟随阶段
elseif brake_phase == 2
% ADRC控制器参数
adrc_params = [0.5, 0.8, 0.3]; % [beta0, beta1, beta2]
% 优化参数
adrc_params = whale_optimization(adrc_params);
% 制动力计算
target_brake_force = max_brake_force * brake_intensity;
current_brake_force = calculate_current_brake_force(vehicle_speed, brake_intensity);
% ADRC控制
error = target_brake_force - current_brake_force;
control_signal = adrc_controller(adrc_params, error);
% 能量回收计算
energy_recovery = calculate_energy_recovery(vehicle_speed, brake_intensity, battery_soc);
% 制动强度检查
if brake_intensity < 0.2
brake_phase = 3; % 进入间隙生成阶段
end
% 制动间隙生成阶段
elseif brake_phase == 3
% 制动间隙生成
clearance_gap = 0.005; % 初始间隙
motor_current = -5; % 反向电流(A)
while clearance_gap > 0.001
% 位置反馈控制
position_error = clearance_gap - 0.001;
motor_current = motor_current - 0.3 * position_error;
% 更新间隙
clearance_gap = clearance_gap - 0.00005;
% 检查是否恢复间隙
if clearance_gap <= 0.001
brake_phase = 1; % 回到间隙消除阶段
break;
end
end
end
% 制动力分配优化
front_rear_ratio = optimize_brake_distribution(vehicle_speed, brake_intensity);
% 能量回收效率
energy_recovery_efficiency = energy_recovery / (max_brake_force * vehicle_speed);
% 输出结果
fprintf('制动阶段: %d, 制动力: %.2fN, 能量回收效率: %.2f%%\n', ...
brake_phase, current_brake_force, energy_recovery_efficiency*100);
如有问题,可以直接沟通
👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇


















 1072
1072

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











