





 本文介绍了DBSCAN密度聚类算法的基本原理,包括核心对象、密度直达、密度可达等概念,详细阐述了算法流程及输入参数的选择,并分析了该算法的优点和缺点。
本文介绍了DBSCAN密度聚类算法的基本原理,包括核心对象、密度直达、密度可达等概念,详细阐述了算法流程及输入参数的选择,并分析了该算法的优点和缺点。
引言
其实对于所有的聚类问题,都有一个核心点,那就是以什么样的规则来划分两个点是不是同一类。密度聚类,本质上就是基于一种密度的概念来进行聚类。而密度的定义本质上也是来自于两点的距离,所以其实对于聚类的算法来看,大家本质上都差不多,谁也别笑话谁。下面我们来总结介绍一种叫做DBSCAN的密度算法。
DBSCAN
DBSCAN 的全称是 Density-Based Spatial Clustering of Applications with Noise
单词里面有个noise,这就说明我们的算法是能抗噪声的,并且我们的算法是可以在空间中聚类为任意形状的聚类的,这点是一些其他的聚类算法不具备的性质,如下所示:
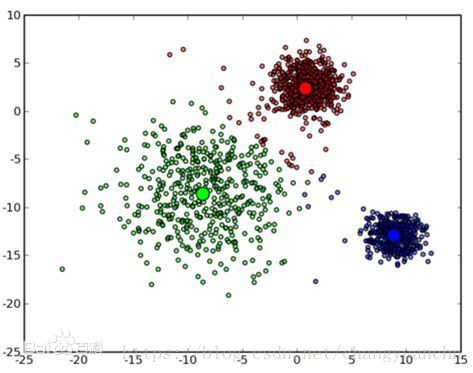
具有这样的性能,就是因为我们的算法引入了“邻域”(其参数为(ε,MinPts)(ε,MinPts))的概念来刻画样本的紧密程度的算法。
下面我们来介绍一下这个算法,在具体算法之前,我们先看几个定义,非常简单,但是可能比较绕,懂了这几个定义,下面的算法就是小菜一碟了。
基于密度的几个概念
ε−ε−邻域:
对xj∈Dxj∈D,其ε−ε−邻域是指样本集DD中与xjxj距离不大于εε的样本,即Nε(xj)={xj∈D|dist(xi,xj)≤ε}Nε(xj)={xj∈D|dist(xi,xj)≤ε}
核心对象:
对象xjxj的ε−ε−邻域中至少包含MinPtsMinPts个样本,即Nε(xj)≥MinPtsNε(xj)≥MinPts,则称xjxj为核心对象。
密度直达:
若xjxj位于xixi的ε−ε−邻域中,且xixi是核心对象,则称xjxj由xixi密度直达。
密度可达:
对xjxj与xixi,存在样本序列p1,p2,...,pnp1,p2,...,pn且p1=xj,pn=xip1=xj,pn=xi 且pi+1pi+1由pipi密度直达,则称xjxj由xixi密度可达。
其实这个概念本质上要求p2,...,pnp2,...,pn都是核心对象
密度相连:
对xjxj与xixi,若存在xkxk使得xjxj与xixi均由xkxk密度可达,则称xjxj由xixi密度相连。
下图直观的表示了这几个概念

基于上面的概念,可以定义DBSCAN算法里面的簇的定义
簇: 由密度可达关系导出的最大的密度相连的样本集合。
因此实际上簇C⊆DC⊆D满足下面的两个条件:
连接性:xi∈C,xj∈C⇒xi∈C,xj∈C⇒ xixi与xjxj密度相连
最大性:xi∈Cxi∈C 且xjxj由xixi密度可达 ⇒xj∈C⇒xj∈C
实际上就是核心对象以及与其密度可达的所有的点的集合
本质上相当于一些核心对象以及边界点组成了簇,簇中核心的点就是核心对象。
具体算法描述
实际上就是核心对象以及与其密度可达的所有的点的集合
输入
- 样本集 D={x1,...,xN}D={x1,...,xN}
- 邻域参数(ε,MinPts)(ε,MinPts)
算法流程
- 找出所有的核心对象,放入集合中 ΩΩ
- 初始化未访问的样本集合:Γ=DΓ=D
- while(Ω≠∅)while(Ω≠∅)
- Γold=DΓold=D
- 随机选取一个核心对象o∈Ωo∈Ω,初始化Q=<o>Q=<o>
- Γ=Γ∖{o}Γ=Γ∖{o}
- while(Q≠∅)while(Q≠∅)
- 从 QQ中取出样本qq
- if(qif(q是核心对象))
- 另Δ=Nε(q)∩ΓΔ=Nε(q)∩Γ, 即获取核心对象qq邻域内的点
- 将内的点加入到QQ中
- Γ=Γ∖ΔΓ=Γ∖Δ
- endifendif
- endwhileendwhile
- k=k+1k=k+1,并且生成聚类簇Ck=Γold∖ΓCk=Γold∖Γ
- Ω=Ω∖CkΩ=Ω∖Ck
- endwhileendwhile
输出
簇划分C={C1,...,CK}C={C1,...,CK}
算法的优缺点
优点:
- 算法不需要指定聚类的数目,但是算法实际上需要另外两个参数(ε,MinPts)(ε,MinPts),所以这个优点也是勉强。
- 可以聚成任意形状的类,就像开始的图所示
- 能够识别出噪声点
缺点:
- 对高维数据效果不算好
- 如果样本的密度不均, 效果会不理想

















 4486
4486

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









