







上一篇文章介绍CAN通信相关的底层配置。本篇文章在此基础上,完成CAN通信功能开发,实现与上位机之间的简单数据交互。使用开发板、USB-CAN转换器、上位机调试软件对通信的效果进行演示。
一、应用函数开发
应用功能包含在CAN接收中断函数中,主要流程包含:
1)接收数据,存入RX_Buff中;
2)对接收数据进行校验,现实中根据所采用的通信规约,校验的方式有不同程度差异。本文的通信规约中,设置字节8为校验位,其值为字节1-7的和。因此在校验时,需将字节1-7求和,得到的值与校验位中的值比较,若相等,认为数据传输正确,可以对数据进行进一步整理,若不相等,则认为数据传输有误,本次传输数据不被下位机使用。
3)根据校验结果,按照通信规约将通信数据进行相应的整理,或者直接生成返回数据。本文的例子中,上位机将一个16位整数拆成两个字节后发送给下位机,所以下位机在校验数据无误后,要将数据重新组合,还原为原来的数值或指令。此外,将校验的结果作为返回数据的一部分,发送给上位机。
4)除了校验的结果以外,准备其他需要返回给上位机的数据,按照通信规约,将返回数据的字节1-7求和,生成校验位。
5)数据发送,完成本次通信中断功能。
//CAN接收中断函数
void USB_LP_CAN1_RX0_IRQHandler(void)
{
if(CAN_GetITStatus(CAN1,CAN_IT_FMP0) != RESET)
{
u8 i;
u8 checkbit;
int16_t Data_Transmit;
Can_Receive_Msg(RX_Buff);//接收数据,存入RX_Buff
/*接收数据校验*/
checkbit = 0;
for(i=0;i<7;i++)
{
checkbit += RX_Buff[i];
}
if(checkbit == RX_Buff[7]) //校验通过
{
//接收数据整理,根据实际情况修改
Data_Transmit = ((int16_t) RX_Buff[1] << 8) + (int16_t) RX_Buff[2];
//返回校验结果
TX_Buff[0] = 1;
}
else //校验不通过
{
//返回校验结果
TX_Buff[0] = 0;
}
//其他返回值设置,根据实际情况修改
TX_Buff[1] = RX_Buff[1];
TX_Buff[2] = RX_Buff[2];
TX_Buff[3] = 0;
TX_Buff[4] = 0;
TX_Buff[5] = 0;
TX_Buff[6] = 0;
//生成返回数据校验值
checkbit = 0;
for(i=0;i<7;i++)
{
checkbit += TX_Buff[i];
}
TX_Buff[7] = checkbit;
//数据发送给上位机
Can_Send_Msg(TX_Buff,CAN_ID,8);
CAN_ClearITPendingBit(CAN1,CAN_IT_FMP0);//清除中断标志位
}
}
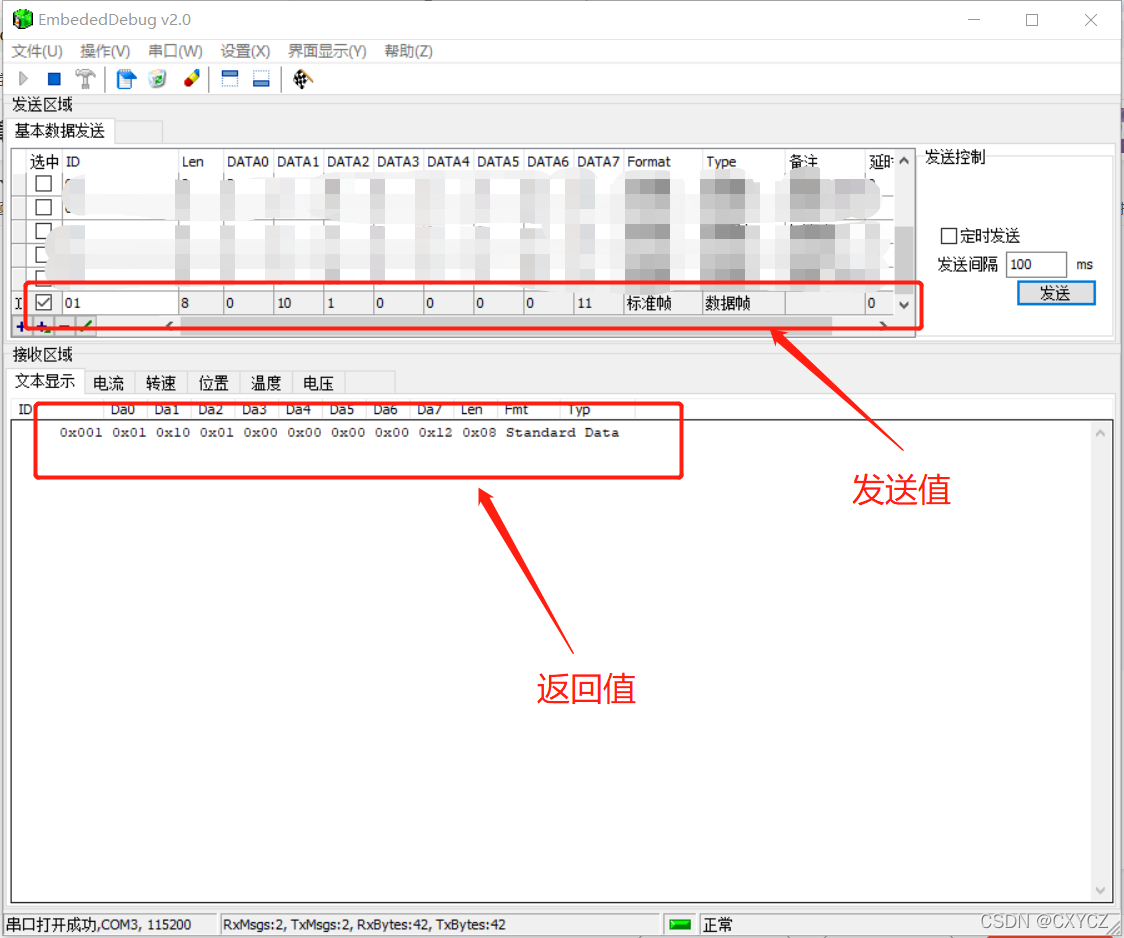
二、通信效果验证
开发板:STM32F103ZET6
软件:Keil uVision5
其他:USB-CAN通讯模块、上位机调试软件EmbededDebugger
通信调试界面:
三、结论
测试结果显示,按照本文介绍的操作流程,可顺利通过CAN实现开发板与上位机之间的交互。对于现实中的应用场景来说,传输的数据往往包含大量的数据和指令,因此其通信规约通常更加复杂,但是本文提出的整体逻辑仍可作为参考。
以上就是通过最近的一个项目,对stm32中CAN通信实现过程的一些总结,为了便于初学者理解,对其中的通信数据进行了简化,希望对有需要的朋友有用。


















 595
595

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











