




GDC24上TheFinals的开发工作室–EmbarkStudios带来;
TheFinals把实时破坏在主流游戏上提升到了新的高度,可以说是新的标杆,达成了:
- 可以出现大规模的任意破坏
- 破坏之后充分影响gameplay,可以把建筑任意炸毁之后,坍塌的建筑继续保留&物理正确(有正确的网络同步),可以废墟中继续刚枪
- 视觉表现到位,性能影响很小(TheFinals的画面屋里表现在PVP FPS中也是顶级存在)
应该说比上一个围绕物理破坏的游戏(彩6)又近了一步.
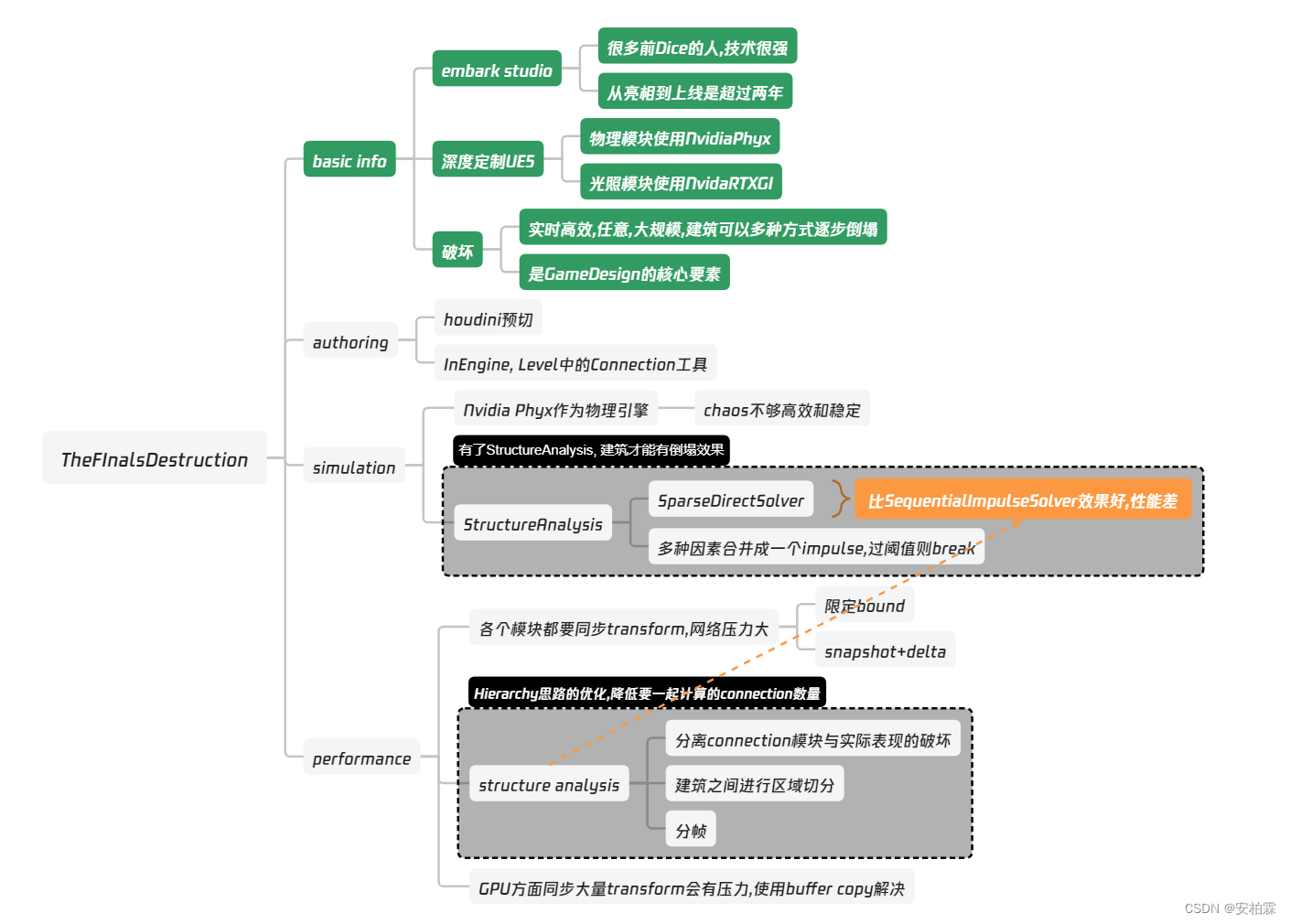
整体overview
Embark Studios &
这个可能很多玩家,甚至开发者不是很熟悉, TheFInals是真正第一款发布的作品;
Embark成立自2018年,其成员很多是来自开发了战地系列的DICE工作室,包括寒霜引擎的引擎架构师Johan Andersson,所以也就不奇怪为什么出手就是这么吊的破坏系统;
TheFinals游戏在整体制作,设计等等方面都是比较成熟,个人非常欣赏,也玩了一段时间,很多点都印象深刻;
刚上的时候热度比较高,现在热度尚可:

游戏设计方面有一些缺陷比较遗憾,但是在美术设定,制作实现方面非常老道,值得体验和学习;
除了破坏以外,对于AI配音解说等方面的应用都很不错.
使用UnrealEngine5开发(深度定制),游戏第一次放消息是21年底,上线是23年底.
破坏系统
体验影响
开篇介绍了下游戏中破坏系统的历史,谈及的是< BattleField:BadCompany >系列以及RedFaction;
TheFinals是希望整个更nb的,在体验端希望做到这些:
- 是game design的核心,
- 是玩家取得优势的关键:这个玩过的就知道了,各种抢宝箱,守钱箱都要做好破坏以及反破坏的准备,绝对不能简单蹲点.
- 给玩家一个"即时反应"的体验,你可能想跳到一个桥上,但这个桥突然被炸了,你就得接二段跳
- 每一局感受是不一样的
技术
这里分了三块:
- 制作工具
- simulation
- performance
- misc
制作工具
首先是单个mesh处理,这个就是预切破坏,embark是在houdini里完成(TA做的):
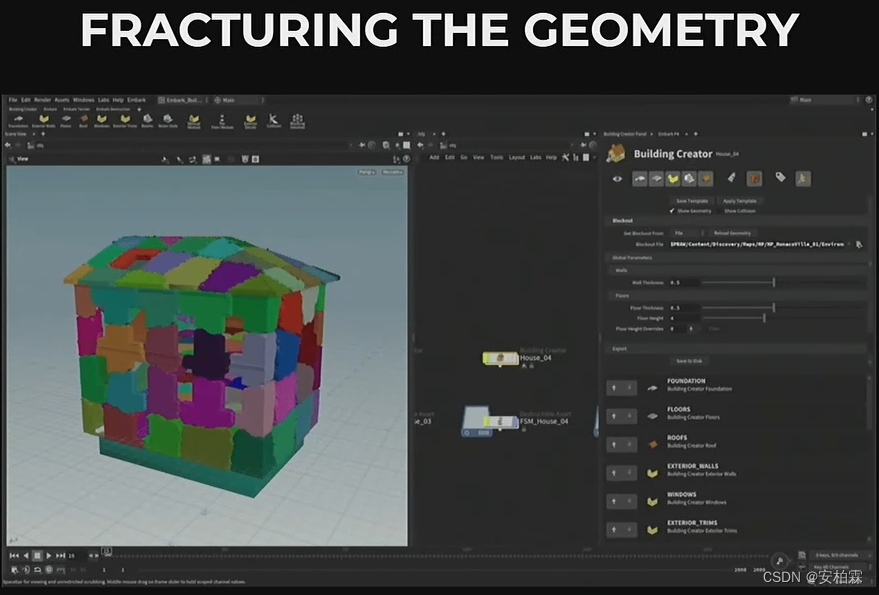
然后是level中connection的工具,这里就是把geometry连接起来,实时simulation时候要进行structure analysis,进而实现坍塌的效果;
这块也是需要工具支持,就是一个in-engine的处理,如图:


simulation

physics simulation这里主要包括:
- 大量的小物件的物理模拟
- 以及一些大型物件的rigid body的模拟
这就意味着对于物理引擎的需求是比较高的,这里embark的选择是:没用ue5的chaos系统,而是使用nv的physx;
原因是chaos在性能和稳定性上不够好,最后选择physx;
structure analysis
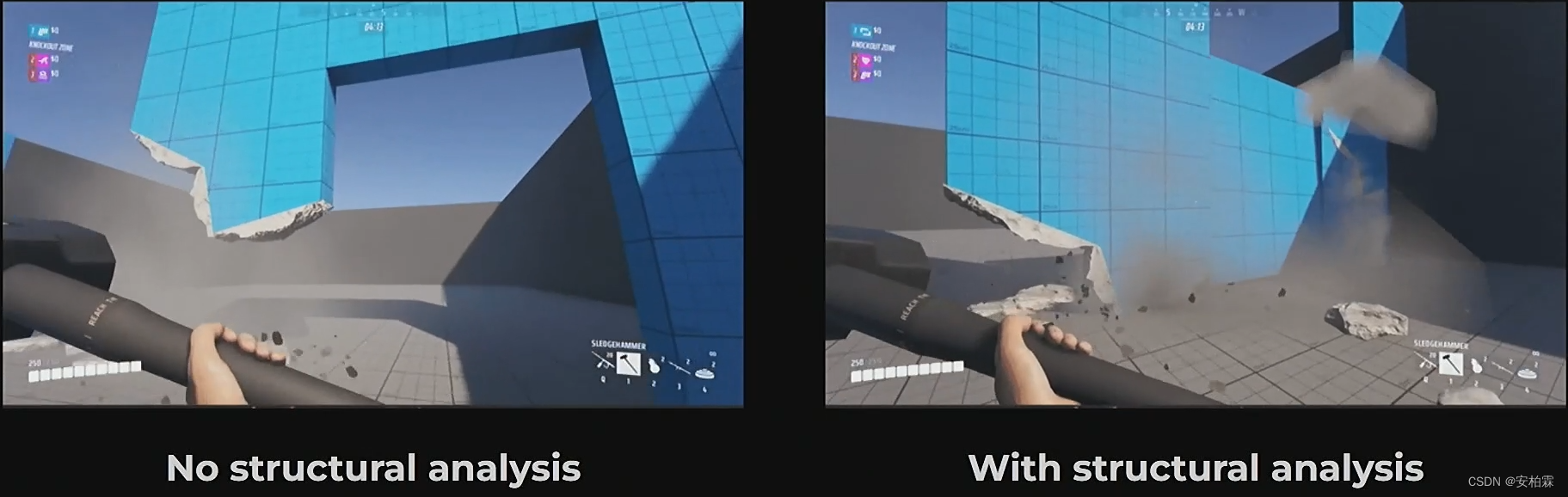
这里如上图,structure analysis就是达成高质量建筑坍塌的关键,没有structure analysis,建筑被打坏就是左边的这样的,而有了structure analysis,在一定程度破坏之后,就会断掉模块之间的connection,进而建筑坍塌;
这里就是一个直接的结算过程:
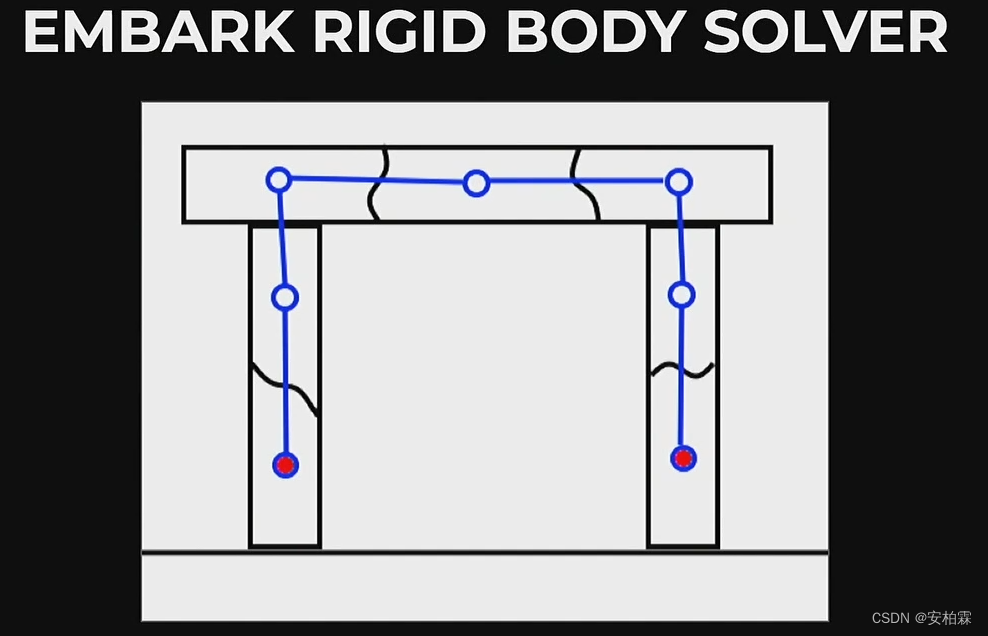
首先是一个基本逻辑是上图这样:模块之间有connection(蓝色线),以及有一个anchor(红色点);
这里的solver是:sparse direct solver using cholesky decomposition;
是micheal ewert(30年经验的物理老法师)经过几个月的迭代弄出来的.
这里覆盖一些宏观概念,
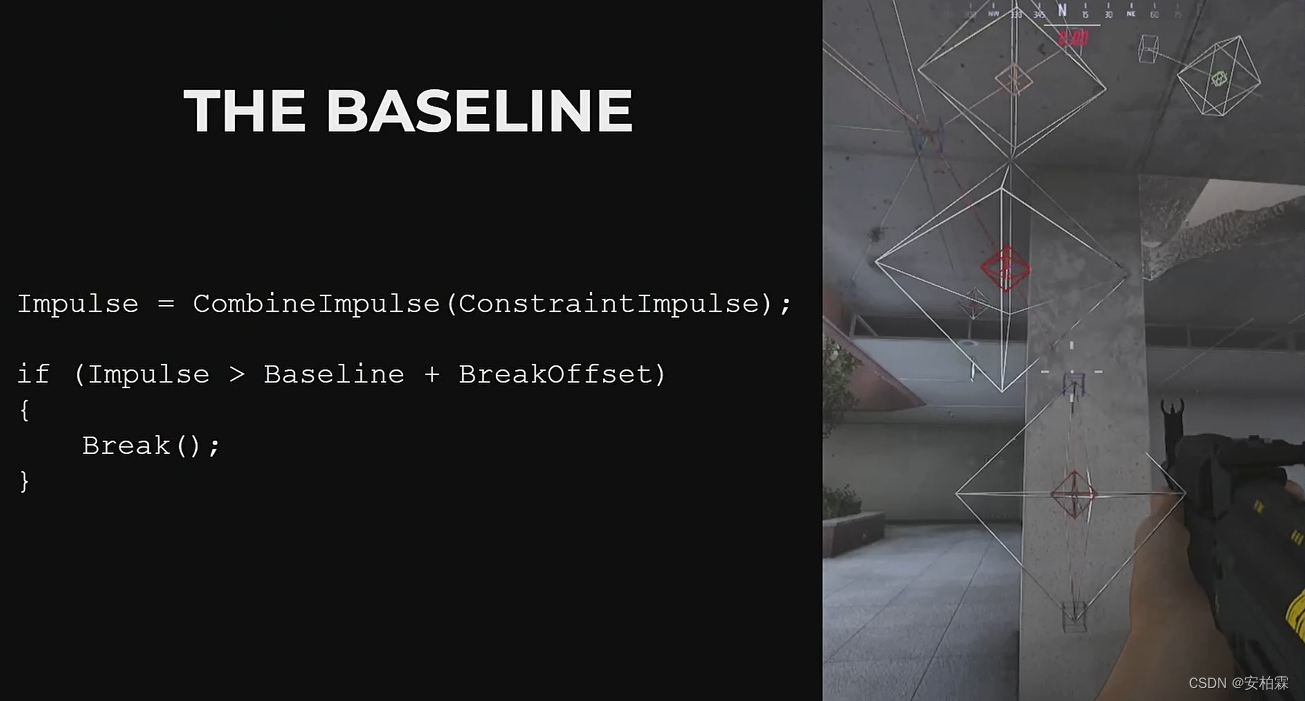
这里一个核心逻辑就是mesh之间的connection什么情况下断,所以基本逻辑就是如图:
计算出一个整体impulse,这个impulse大于一个阈值(加上一些随机偏移),那么就会断.
在上图右半边的图示中就是白色的菱形是阈值,红色是当前的impulse.
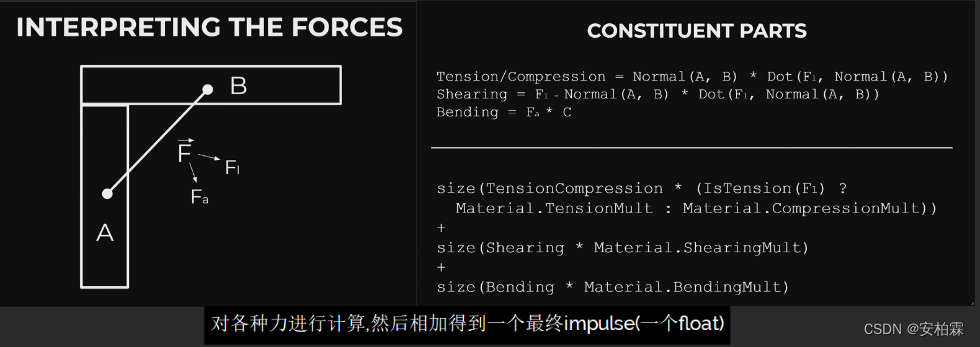
这里的impulse,实际上是多种多个力的综合:
这个就是整体的connection以及break的做法;
后续也介绍到了embark所用的sparse direct solver对比常用的sequential impulse solver的优劣势, sparse direct的:
pros: 整体力的分布更加均衡和稳定,最终效果更好
cons: 效率不好,需要更多的优化
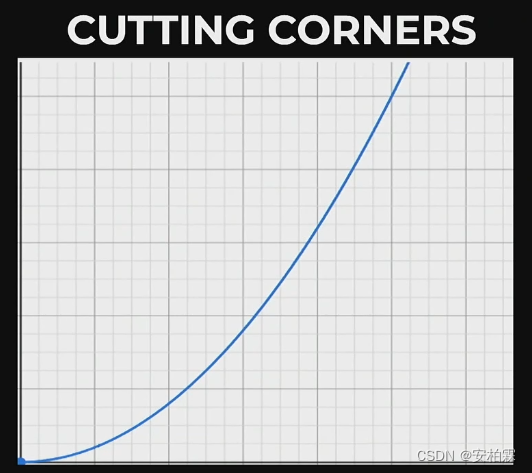
这里sparse direct solver的计算量,和计算区域内的connection量呈平方级别上升,所以一些LOD&Hierarchy的思路就是优化的核心
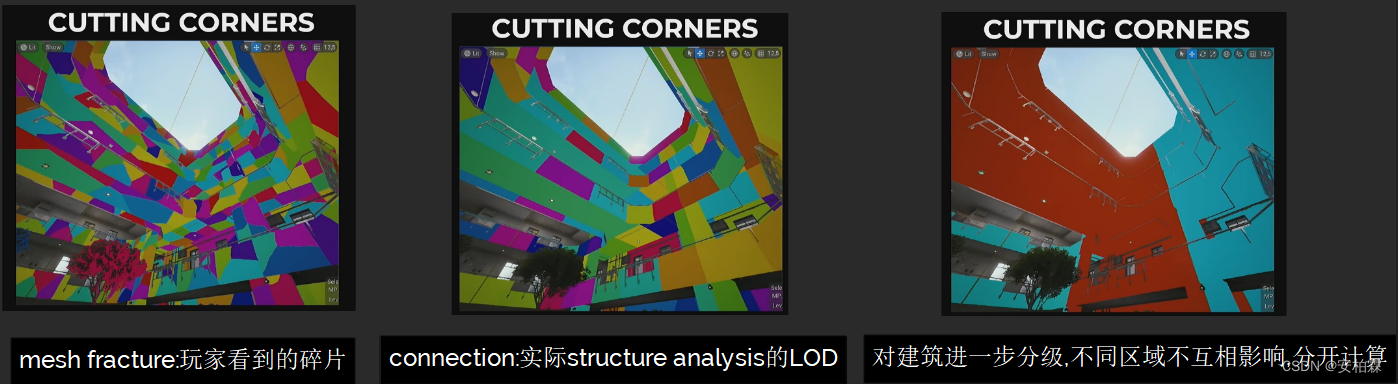
这里的lod思路我们也比较常见:
- 最细的是玩家看到的炸出来的
- 然后做一些合并,粒度上升,作为structure analysis用
- 对于不同区域,再进行分离
- 最后是分帧处理
然后性能就基本ok了;

最后建筑坍塌各种情况,品质和性能都很6;
性能
网络性能
由于破坏后的部分也参与gameplay所以炸出来的结构和碎片的transform也需要进行同步;
如果brute force的话,在建筑坍塌时候,大约是400k,这就过猛了,优化方法:通过限定范围,来对同步数据进行压缩:
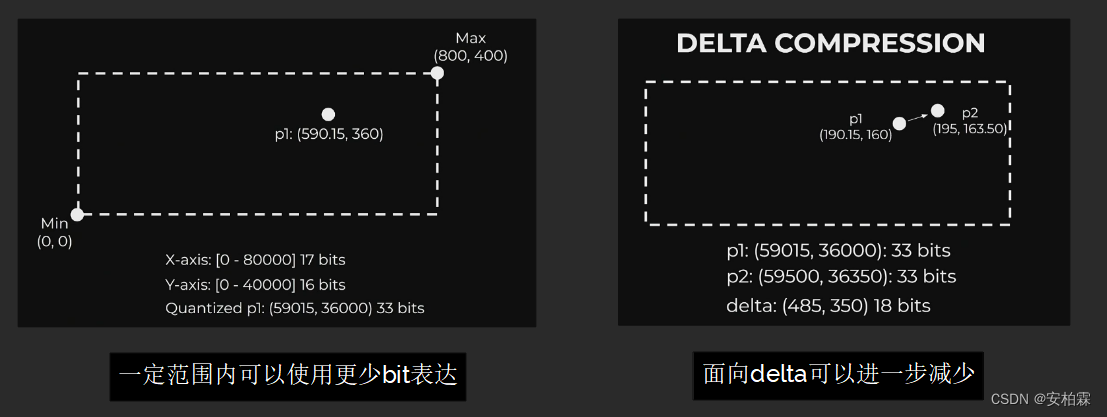
- 破坏部分的transform是在一定范围内的(而不是全世界到处飞),所以需要表达的数字小很多,这个可以压缩
- 另外同步是通过snapshot+delta的方式,这个delta也可以压缩
两个一起操作,最后就是:
从400k的网速到175k的网速,基本可以了;
渲染方面,都比较直接,不展开了:
- Nvidia RTGI
- 使用transform pool降低transform传到gpu中的消耗(直接buffer copy)
其他方面
- movement:尽量少做prediction,使用一些animation,camera等技巧来mask延迟; 这块也是最大的挑战之一;
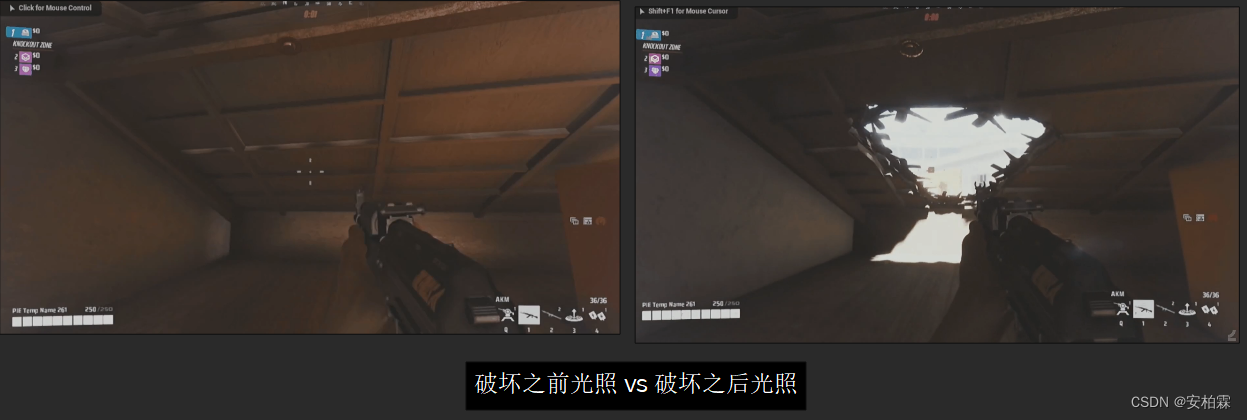
- 光照方面使用的是NvidiaRTXGI(不是ue5.lumen),实际在低配电脑上还提供一个预烘培的光照,但这个对于破坏情况反馈不是正确的

















 1283
1283

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









