






 本文详细描述了如何在Matlab和SolidWorks之间进行仿真,包括安装必要的插件,如smlink和SimMechanicsLink,以及在两个软件间建立连接的过程。作者分享了个人的学习经验,强调了选择正确版本插件的重要性,并预告后续将探讨更多配置内容。
本文详细描述了如何在Matlab和SolidWorks之间进行仿真,包括安装必要的插件,如smlink和SimMechanicsLink,以及在两个软件间建立连接的过程。作者分享了个人的学习经验,强调了选择正确版本插件的重要性,并预告后续将探讨更多配置内容。

Matlab不能与SolidWorks不能直接进行仿真,需要下载插件后才可以。
插件:只看matlab对应的版本号选择即可。(私聊、私发)
注意一定要下载适合自己版本的文件,以下是按matelab2022a与solidworks2020之间的联合进行的相关配置。

一、Matlab前期
1、所需两个插件必须满足:
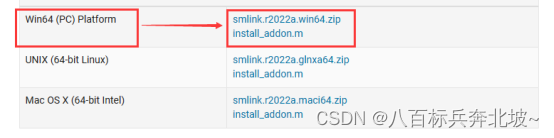
2、获得插件后不要解压,要放到Matlab的安装路径下,为了不混淆,我是建立了一个文件夹来存放这个插件的,只要在Matlab的安装路径下,根据自己情况随意发挥即可。

3、以管理员身份运行Matlab,将下载的文件路径添加在Matlab的路径下面:
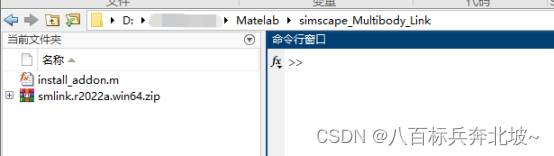
然后在Matlab命令窗口:
1>运行install_addon("smlink.r2022a.win64.zip"),括号内也可以写成路径。可能需要一点时间,不要着急,等待完成后再进行下一步。
2>运行regmatlabserver,等待结束再进行下一步。
3>运行smlink_linksw,运行结束后可能会出现一个界面,点击确定就可以了
到此Matlab的前期就算是完成了。
- Solidworks前期
- 将之前的两个文件放到SW安装目录下:
- 重新打开SolidWorks,依次电机【工具】、【插件】,在其他插件中按下图进行勾选即可:
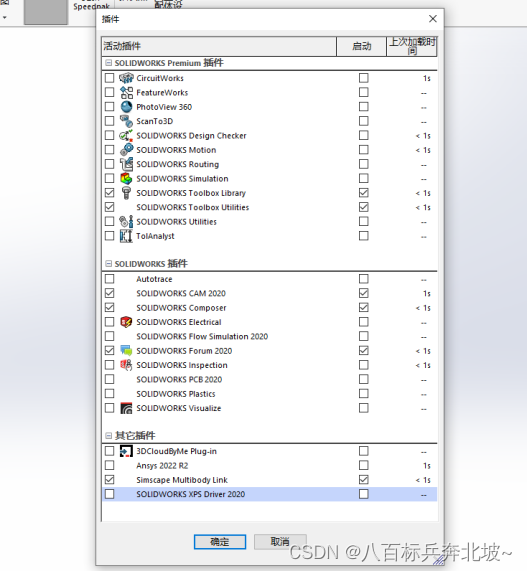
两个全部勾选,然后点击确定。
到此,Solidworks的前期工作也全部完成。
- Solidworks与Simulink联合仿真
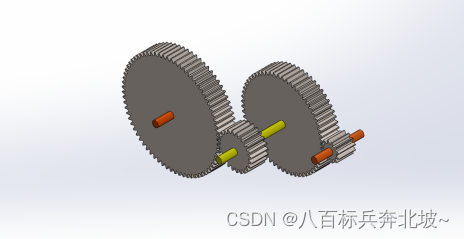
- 首先在Solidworks中新建零件模型,然后保存,这里我看有些事要求保存成‘.prt;.sldprt’格式的,我不知道有没有这个要求(有懂的大佬可以说一下哦),然后完成装配体。
- 在装配体中依次点击【工具】、【SimMechanics Link】或者【Simscape Multibody】、【Export】、【SimMechanics Link Second Generation】另存为.xlm文件,以备在Matlab中打开。
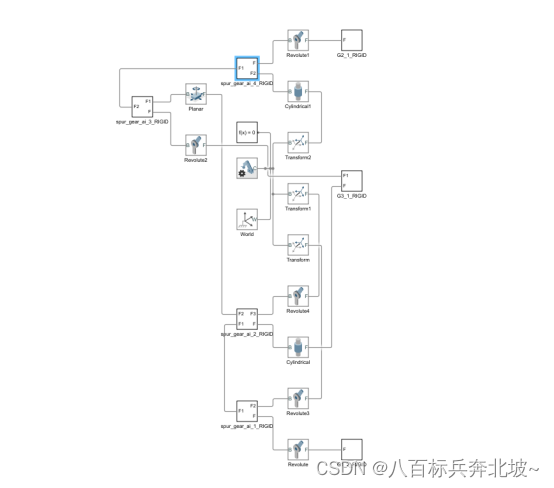
- 然后打开Matlab,在命令窗口输入smimport(‘你想要打开的文件名称,必须是.xml格式’),我这里是:smimport('Double Reductions Spur Gear Transmission.xml'),然后等待,这个过程可能有点子慢(根据你的模型复杂程度)
- 然后就会自动生成simulink模型:
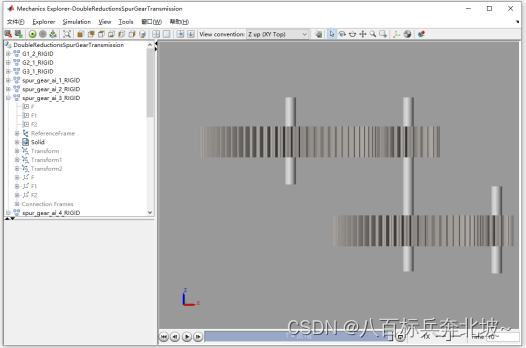
- 点击运行simulink,就可以得出以下运行结果:
本期仅仅是对自己学习的一个总结,也希望能够帮助到有需要的同学,目前仅仅是做到了模型的导入,在两者之间建立了初步的联系,具体导入 前 后 的参数设置以及一些其他配置将随着本菜鸡的深入学习在接下来的内容中持续更新。

















 2000
2000

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









