








 超级会员免费看
超级会员免费看

文章主要内容总结
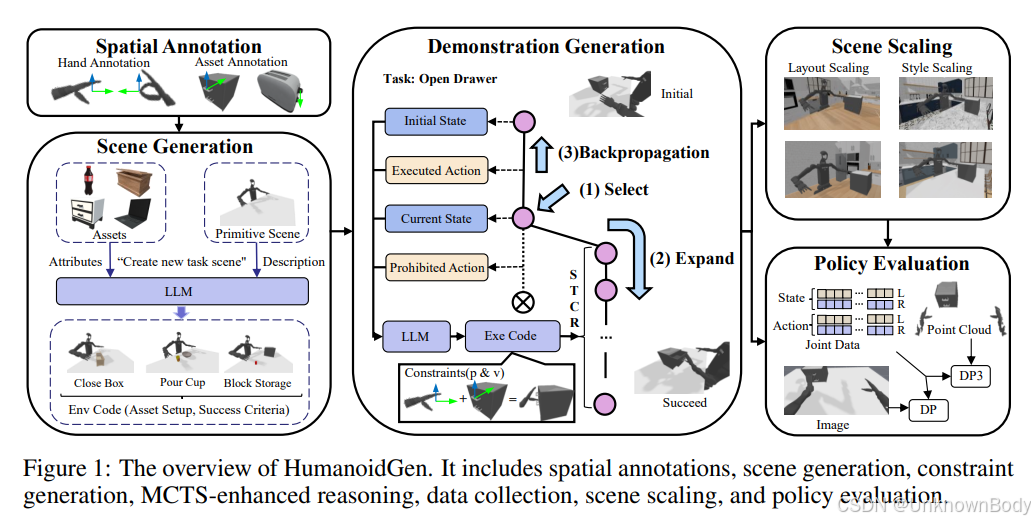
本文提出了HumanoidGen,一个用于双足机器人双臂灵巧操作的自动化任务创建与演示数据生成框架,旨在解决现有机器人数据集多针对单臂平台、双臂灵巧操作数据稀缺的问题。其核心流程包括:
- 空间标注与场景生成:对资产(物体)和灵巧手进行关键点位与轴的标注,基于LLM生成包含环境配置和任务成功条件的代码;
- LLM任务规划:将长程任务分解为原子操作序列,生成空间约束链(如点位重合、轴平行),并通过轨迹优化器求解运动轨迹;
- 推理增强:引入蒙特卡洛树搜索(MCTS)的STCR机制,提升LLM在长程任务和标注不足场景下的推理能力;
- 基准构建与实验验证:构建包含20个不同难度任务的HGen-Bench基准,实验表明生成的数据可有效提升2D和3D扩散策略的性能,MCTS显著改善了LLM的推理效率。
创新点
- 基于原子操作与空间标注的LLM规划:通过对物体和手的关键点位、轴进行标注,使LLM能生成精确的空间约束链,将双臂操作转化为可求解的约束优化问题。
- MCTS增强的推理机制:提

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











