








 超级会员免费看
超级会员免费看

文章主要内容
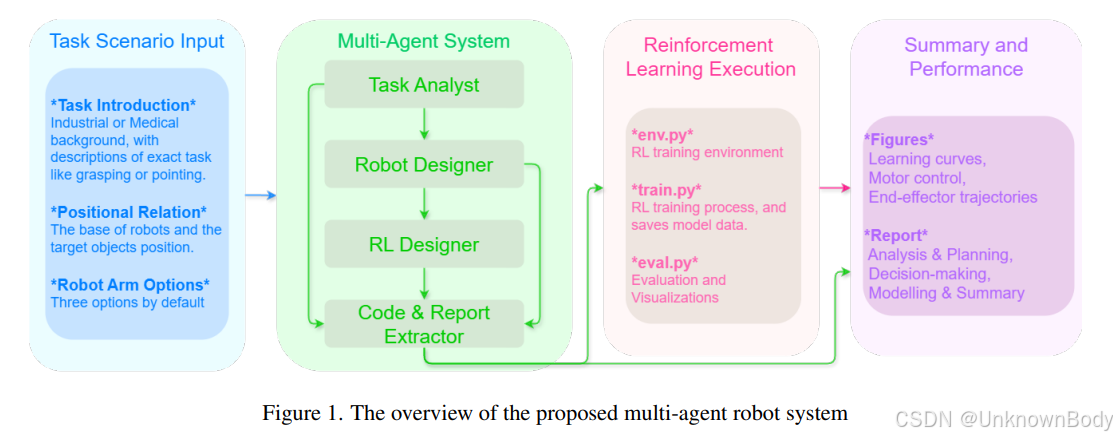
本文提出了一种基于大型语言模型(LLMs)的多智能体系统(MAS)框架,用于机器人自主任务分析、机械设计和路径生成。框架包含三个核心智能体:任务分析器(Task Analyst)、机器人设计器(Robot Designer)和强化学习设计器(RL Designer),分别负责任务解析、机械结构设计和控制策略生成,并通过代码提取器和报告提取器输出可执行代码和技术报告。实验使用GPT和DeepSeek系列模型验证了框架的泛化能力,结果表明DeepSeek-R1在各项指标中表现最优,证明了该框架在提升机器人系统开发效率和可及性方面的潜力。
文章创新点
- 模块化多智能体框架:
设计了三核心智能体流水线,实现任务分析、机械设计到强化学习策略生成的全流程自动化,支持灵活扩展和工业级应用。 - 多模态输出能力:
生成可执行Python代码(如环境定义、训练脚本)和结构化技术报告,结合路径可视化结果,提升人机交互效率。 - 泛化性与消融实验:
通过跨任务(工业/医疗场景)和智能体消融实验,系统验证了框架对不同LLMs的兼容性及各组件的必要性,为后续研究提供基准。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2215
2215

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











