《数学之美(第一版)》笔记 —— 第4章
最新推荐文章于 2024-06-26 10:34:35 发布





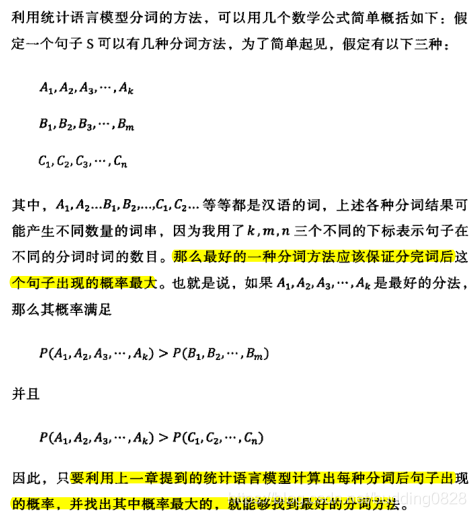
 本文探讨了中文分词方法的演变,从查字典到统计语言模型,介绍了解决二义性问题的方法,并讨论了不同分词颗粒度对翻译效果和网页搜索的影响。
本文探讨了中文分词方法的演变,从查字典到统计语言模型,介绍了解决二义性问题的方法,并讨论了不同分词颗粒度对翻译效果和网页搜索的影响。
本文探讨了中文分词方法的演变,从查字典到统计语言模型,介绍了解决二义性问题的方法,并讨论了不同分词颗粒度对翻译效果和网页搜索的影响。
本文探讨了中文分词方法的演变,从查字典到统计语言模型,介绍了解决二义性问题的方法,并讨论了不同分词颗粒度对翻译效果和网页搜索的影响。
 1439
1439

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言