






引言:嵌入式开发的 “捷径”—— 固件库与标准化
在嵌入式开发领域,STM32凭借其丰富的外设、优异的性能和完善的生态,成为开发者的首选平台之一。但直接操作寄存器开发 STM32 项目,不仅效率低下,还容易因硬件细节出错。此时,固件库和CMSIS 标准就成了开发者的 “捷径”—— 它们将底层硬件操作封装为易用的函数接口,让开发者聚焦于功能逻辑,而非寄存器地址。
对于无人机飞控这类对实时性、可靠性要求极高的场景,固件库和 CMSIS 的作用更为关键:传感器数据采集、电机 PWM 控制、姿态解算算法(依赖 CMSIS-DSP)等核心功能,都可通过标准化接口快速实现。本文将从理论到实践,结合STM32F103C8T6(无人机飞控常用型号)和WS2812B RGB LED开发示例,全方位解析 STM32 固件库与 CMSIS 标准。
一、CMSIS 标准:ARM 内核的 “通用语言”
1.1 CMSIS 是什么?
CMSIS 全称 Cortex Microcontroller Software Interface Standard(Cortex 微控制器软件接口标准),是 ARM 公司为 Cortex-M 系列处理器制定的软件接口规范。其核心目的是:为不同厂商(如 ST、NXP、Microchip)的 Cortex-M 芯片,提供统一的软件框架,让中间件(如 RTOS、DSP 库)能 “跨芯片” 复用,大幅降低开发和迁移成本。
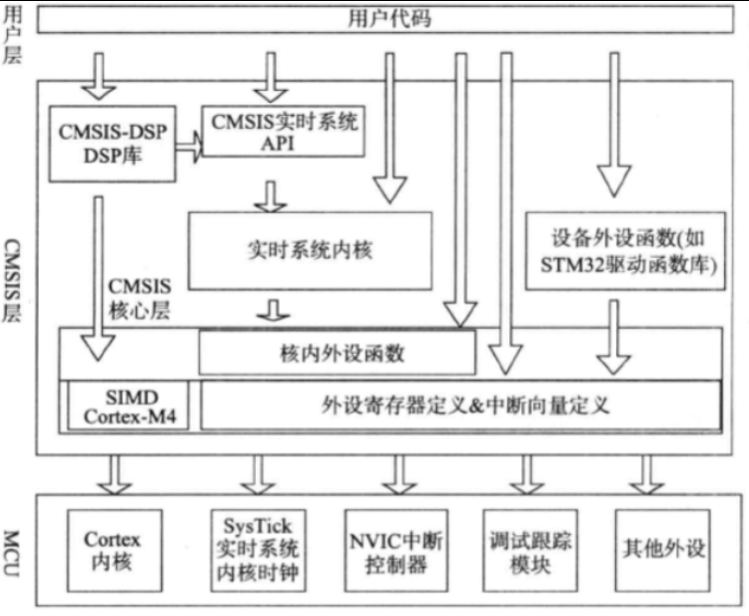
1.2 CMSIS 的层级结构(结合硬件架构)
CMSIS 并非单一组件,而是分为多个层级,与 STM32 硬件、固件库协同工作。结合下图(STM32 与 CMSIS 层级关系),我们用表格解析各层级:
| CMSIS 层级 | 核心功能 | 关键文件 / 组件 | 对 STM32 开发的意义 |
|---|---|---|---|
| 核心层(Core) | 定义 Cortex-M 内核的寄存器映射、异常处理、内核外设(如 NVIC、SysTick)的访问接口 | core_cm3.h(F1 系列用 CM3 内核)、nvic.h、systick.h等 | 屏蔽不同厂商内核差异,统一 “内核级操作”(如中断配置、时钟滴答) |
| DSP 库(CMSIS-DSP) | 提供数字信号处理算法,如 FIR 滤波、FFT、矩阵运算、PID 控制等 | arm_math.h、arm_const_structs.h等 | 无人机飞控中传感器数据融合(如 IMU 姿态解算)、电机控制算法可直接调用 |
| RTOS 接口(CMSIS-RTOS) | 定义实时操作系统的统一 API,如任务创建、信号量、延时等,屏蔽不同 RTOS(FreeRTOS、RTX 等)的差异 | cmsis_os.h、cmsis_os2.h(新版本) | 飞控需 “多任务实时性”(如同时采集传感器、解算姿态、响应遥控),通过统一 API 快速集成 RTOS |
1.3 各层级如何协同工作?
以 “无人机飞控中使用 PID 控制电机” 为例:
- 用户层:飞控算法代码调用
arm_PID_Control()(CMSIS-DSP 库函数)。 - CMSIS-DSP 层:
arm_PID_Control()封装了 PID 算法的数学逻辑。 - CMSIS 核心层:算法运行依赖内核的计算能力,若需实时调度,还会通过
cmsis_os.h调用 RTOS 接口。 - STM32 固件库层:最终,PID 输出的 “电机占空比” 通过 STM32 固件库的
TIM_SetCompare()函数,控制 PWM 输出。 - 硬件层:STM32 的定时器外设产生 PWM,驱动无人机电机。
这种 “分层协作”,让开发者无需关心 “内核如何计算”“PWM 寄存器如何配置”,只需聚焦 “飞控算法逻辑”。
二、STM32 固件库:官方的 “硬件操作手册”
2.1 固件库的发展与版本差异
STM32 官方提供的固件库,经历了 ** 标准外设库(SPL)到HAL/LL 库(Cube 库)** 的演变。不同版本各有特点,适合不同场景:
| 库类型 | 发布时间 | 核心特点 | 适用场景 | 对 STM32F103C8T6 飞控的友好度 |
|---|---|---|---|---|
| 标准外设库(SPL) | 早期(如 V3.5.0) | 基于寄存器封装,层级清晰,接近底层,执行效率高 | 追求实时性、硬件控制精度的场景(如无人机飞控) | ★★★★★(飞控主流选择,代码简洁、实时性好) |
| HAL 库(Cube 库) | 较新(如 CubeF1 V1.8.5) | 抽象层次高,跨系列兼容性强,API 统一(如 F1/F4/F7 系列通用) | 快速原型、跨 STM32 系列迁移的项目 | ★★★☆☆(飞控需极致实时性,HAL 有时略 “臃肿”) |
| LL 库(Cube 库底层) | 伴随 HAL 推出 | 接近 SPL,轻量级、效率高,是 HAL 的 “底层支撑” | 需要 HAL 兼容性,又追求 “接近底层效率” 的场景 | ★★★★☆(可结合 LL 和 SPL 优点,灵活度高) |
2.2 固件库的核心文件结构(以 SPL 为例)
STM32 标准外设库(以STM32F10x_StdPeriph_Lib_V3.5.0为例)的典型结构如下:
plaintext
STM32F10x_StdPeriph_Lib/
├── Libraries/ // 库核心
│ ├── CMSIS/ // CMSIS标准相关
│ │ ├── CM3/ // Cortex-M3内核专属(F1系列用CM3)
│ │ │ ├── core_cm3.c/h // 内核寄存器、异常处理定义
│ │ │ ├── system_stm32f10x.c/h // 系统时钟初始化
│ │ ├── Device/STM32F10x/ // STM32F1系列专属
│ │ ├── startup/ // 启动文件(汇编,如startup_stm32f10x_md.s)
│ │ ├── stm32f10x.h // 芯片全局头文件(寄存器映射、型号定义)
│ ├── STM32F10x_StdPeriph_Driver/ // 标准外设驱动
│ ├── Inc/ // 外设头文件(如stm32f10x_gpio.h、stm32f10x_usart.h)
│ ├── Src/ // 外设源文件(如stm32f10x_gpio.c、stm32f10x_usart.c)
├── Project/ // 示例工程(可参考修改)
├── Utilities/ // 实用工具(如串口打印、LCD驱动)
2.3 关键文件详解:每个文件都是 “硬件的钥匙”
(1)启动文件:startup_stm32f10x_md.s(中等容量芯片,F103C8T6 属于此类)
- 作用:汇编编写,是程序上电后执行的第一段代码。负责:
- 初始化堆栈指针(SP);
- 配置中断向量表(告诉 CPU “中断发生时该执行哪个函数”);
- 调用
SystemInit()(初始化系统时钟); - 最终跳转到
main函数,进入 C 语言世界。
- 飞控中的意义:飞控板上电后,需先通过启动文件完成 “硬件初始化准备”,才能运行复杂的飞控算法。
(2)芯片全局头文件:stm32f10x.h
- 作用:定义STM32F1 系列的所有寄存器地址、位掩码、芯片型号宏(如
STM32F10X_MD表示中等容量)。 - 内容示例:
c
运行
-
#define PERIPH_BASE ((uint32_t)0x40000000) // 外设基地址 #define GPIOA_BASE (PERIPH_BASE + 0x0800) // GPIOA基地址 #define GPIOA ((GPIO_TypeDef *)GPIOA_BASE) // 强制类型转换为GPIO结构体指针 typedef struct { __IO uint32_t CRL; // 端口配置低寄存器 __IO uint32_t CRH; // 端口配置高寄存器 __IO uint32_t IDR; // 输入数据寄存器 __IO uint32_t ODR; // 输出数据寄存器 // ... 其他寄存器 } GPIO_TypeDef; - 飞控中的意义:所有外设操作(如 GPIO、USART)的 “底层根源” 都在这个文件中,固件库的函数最终也会通过这里的定义操作硬件。
(3)系统时钟初始化:system_stm32f10x.c
- 作用:包含
SystemInit()函数,负责配置 STM32 的系统时钟(如选择外部晶振、设置 PLL 倍频,将系统时钟从默认的 8MHz 提升到 72MHz)。 - 飞控中的关键:飞控对时钟精度和频率要求高(传感器采样率、PWM 频率、算法运算速度都依赖时钟)。例如,将系统时钟配置为 72MHz,能让 STM32 以更高效率运行姿态解算算法。
(4)外设驱动头文件 / 源文件:如stm32f10x_gpio.h/c
- 作用:封装 GPIO 外设的所有操作,提供初始化、置位、复位、读取电平等函数。
- 核心函数示例(
stm32f10x_gpio.c中):c
运行
-
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct) { // 根据结构体参数,配置GPIO的模式、速度、上拉下拉等 } void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) { GPIOx->BSRR = GPIO_Pin; // 置位(输出高电平) } - 飞控中的应用:飞控板上的LED 指示灯(GPIO 输出)、按键(GPIO 输入)、传感器接口(如 I2C 的 GPIO 模拟)都依赖这些函数。
三、函数库接口:“一句话” 操作硬件
STM32 固件库的接口设计具有统一性:无论操作 GPIO、USART 还是 TIM,都遵循 “外设_Init()初始化 → 功能函数操作 → 状态 / 中断函数辅助” 的流程。
3.1 GPIO 接口:最基础的硬件交互
| GPIO 操作类型 | 函数原型(SPL) | 功能描述 | 飞控中的应用示例 |
|---|---|---|---|
| 初始化 | void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct) | 配置 GPIO 的模式(输入 / 输出 / 复用)、速度(高速 / 低速)、上拉下拉等 | 配置飞控板上的LED 引脚为 “推挽输出、高速” |
| 置位(输出高) | void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) | 将指定 GPIO 引脚置为高电平 | 点亮 LED |
| 复位(输出低) | void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) | 将指定 GPIO 引脚置为低电平 | 熄灭 LED |
| 读取输入电平 | uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) | 读取 GPIO 输入引脚的当前电平(0/1) | 读取飞控板按键是否按下(按键接 GND,上拉输入) |
| 读取输出电平 | uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) | 读取 GPIO 输出引脚的当前电平(0/1) | 检查 LED 当前是否处于 “点亮” 状态 |
3.2 USART 接口:飞控与外界的 “通信桥梁”
无人机飞控需与遥控器(接收控制指令)、上位机(传输调试数据)通信,USART 是最常用的接口之一。
| USART 操作类型 | 函数原型(SPL) | 功能描述 | 飞控中的应用示例 |
|---|---|---|---|
| 初始化 | void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct) | 配置波特率(如 115200)、数据位(8 位)、停止位(1 位)、校验位(无)等 | 配置与遥控器通信的 USART,波特率匹配遥控器 |
| 发送数据 | void USART_SendData(USART_TypeDef* USARTx, uint16_t Data) | 发送 1 个数据(8 位或 9 位)到 USART 数据寄存器 | 发送飞控姿态数据(如四元数)给上位机 |
| 接收数据 | uint16_t USART_ReceiveData(USART_TypeDef* USARTx) | 从 USART 数据寄存器读取接收到的数据 | 接收遥控器的控制指令(如油门、方向) |
| 中断配置 | void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState) | 使能 / 禁用 USART 的中断(如接收完成中断) | 配置 “接收中断”,实时响应遥控器指令(无需轮询) |
| 状态检查 | FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG) | 检查 USART 的标志位(如发送完成、接收非空) | 检查 “发送是否完成”,避免数据覆盖;检查 “是否有新数据接收” |
3.3 TIM 接口:飞控的 “时间管家”(PWM、定时)
无人机电机控制依赖PWM 输出,传感器采样依赖定时中断,这些都由 TIM(定时器)外设实现。
| TIM 操作类型 | 函数原型(SPL) | 功能描述 | 飞控中的应用示例 |
|---|---|---|---|
| 时基初始化 | void TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct) | 配置定时器的计数模式、预分频系数、自动重装值等 | 配置 “10ms 一次” 的传感器采样定时器(预分频 + 自动重装实现定时) |
| PWM 初始化 | void TIM_PWMInit(TIM_TypeDef* TIMx, TIM_PWMInitTypeDef* TIM_PWMInitStruct) | 配置 PWM 的模式(边沿对齐 / 中心对齐)、占空比模式等 | 配置电机 PWM 输出,控制无刷电机转速 |
| PWM 占空比设置 | void TIM_SetComparex(TIM_TypeDef* TIMx, uint16_t Compare) | 设置 PWM 通道的比较值,间接控制占空比 | 调整电机 PWM 占空比,改变电机转速 |
| 中断使能 | void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState) | 使能 / 禁用定时器中断(如更新中断) | 使能 “定时更新中断”,触发传感器采样 |
四、无人机飞控板与 STM32F103C8T6:硬件与软件的结合
4.1 飞控板的核心需求与 F103C8T6 的匹配度
无人机飞控板需完成以下核心任务:
- 传感器数据采集:加速度计、陀螺仪(如 MPU6050)、磁力计、气压计等,通常用 I2C/SPI 接口。
- 遥控器信号接收:通过 USART 接收 PPM、SBUS 等协议信号。
- 电机控制:通过 4 路 PWM 输出控制无刷电机电调。
- 姿态解算与控制:用 CMSIS-DSP 库进行滤波、矩阵运算、PID 控制等。
- 数据传输:通过 USART/USB 向上位机传输调试数据。
STM32F103C8T6 的资源:
- Flash:64KB(足够存储飞控算法和固件库);
- RAM:20KB(足够运行姿态解算、PID 控制等中间数据);
- 外设:2 个 I2C、3 个 USART、4 个 TIM(可生成 PWM)、多个 GPIO,完全满足 “简化版飞控” 的需求。
4.2 固件库在飞控中的典型应用
以 “MPU6050 传感器数据采集(I2C 接口)” 为例,固件库的作用的体现:
- I2C 初始化:调用
I2C_Init(),配置 I2C 的时钟、地址、速度等。 - 寄存器读写:通过
I2C_SendData()/I2C_ReceiveData(),向 MPU6050 的寄存器写入配置(如采样率)、读取原始加速度 / 角速度数据。 - 数据处理:调用 CMSIS-DSP 库的
arm_Math函数(如滤波、矩阵乘法),将原始数据解算为无人机姿态(四元数、欧拉角)。 - 控制输出:根据姿态误差,用 PID 算法计算电机 PWM 占空比,通过
TIM_SetCompare()输出 PWM。
五、WS2812B 开发示例:基于 STM32F103C8T6 飞控板
5.1 WS2812B 原理:“一根线” 控制 RGB 彩灯
WS2812B 是内置驱动的 RGB LED,只需一根数据线即可控制颜色。其通信协议的核心是:
- 数据编码:用 “不同时长的高电平” 表示逻辑 0/1(NRZ 编码):
- 逻辑 1:高电平≈800ns,低电平≈450ns;
- 逻辑 0:高电平≈400ns,低电平≈850ns。
- 颜色格式:按GRB 顺序传输(绿色→红色→蓝色),每个颜色通道 8 位,共 24 位。
- 复位信号:数据线保持低电平 > 50μs,WS2812B 会 “复位”,准备接收新数据。
5.2 项目文件结构与各文件夹功能
假设基于 ** 标准外设库(SPL)** 搭建 WS2812B 项目,文件结构如下:
plaintext
WS2812B_F103/
├── Inc/ // 头文件目录
│ ├── stm32f10x_conf.h // 外设库配置(选择需要的驱动)
│ ├── stm32f10x_gpio.h // GPIO驱动头文件
│ ├── ws2812b.h // 自定义WS2812B驱动头文件
├── Src/ // 源文件目录
│ ├── main.c // 主函数
│ ├── stm32f10x_gpio.c // GPIO驱动源文件
│ ├── ws2812b.c // 自定义WS2812B驱动源文件
├── Libraries/ // 固件库与CMSIS
│ ├── CMSIS/ // CMSIS核心文件(core_cm3.c/h、system_stm32f10x.c/h等)
│ ├── STM32F10x_StdPeriph_Driver/ // 标准外设驱动(Inc/Src)
├── Startup/ // 启动文件
│ ├── startup_stm32f10x_md.s // F103中等容量芯片启动文件
各文件夹 / 文件的功能详解:
| 路径 | 功能描述 | WS2812B 项目中的作用 |
|---|---|---|
Inc/ | 存放所有头文件,包括 STM32 外设头文件、自定义驱动头文件 | 存放ws2812b.h,定义 WS2812B 的引脚、函数声明(如初始化、颜色设置) |
Inc/stm32f10x_conf.h | 配置 “需要编译的外设驱动模块”(通过宏定义开关,如#define GPIO表示启用 GPIO 驱动) | 需开启GPIO宏,因为 WS2812B 依赖 GPIO 输出精确时序 |
Inc/ws2812b.h | 自定义 WS2812B 驱动头文件,声明初始化函数、颜色设置函数、时序生成函数等 | 对外提供统一接口(如ws2812b_Init()、ws2812b_SetColor()),隐藏底层时序细节 |
Src/ | 存放所有源文件,包括 STM32 外设驱动实现、自定义驱动逻辑 | 存放ws2812b.c,实现 WS2812B 的 “精确时序生成” 和 “数据发送” |
Src/main.c | 程序入口,包含main函数,负责系统初始化、WS2812B 控制逻辑(如循环显示颜色) | 是整个项目的 “大脑”,调用各模块函数实现功能 |
Src/ws2812b.c | WS2812B 驱动的实现文件,核心是时序生成(通过 GPIO 精确控制高低电平持续时间) | 实现 “逻辑 0/1 的时序”“复位信号”,确保 WS2812B 能正确解析数据 |
Libraries/CMSIS/ | 包含 CMSIS 标准文件,如core_cm3.c(内核操作)、system_stm32f10x.c(系统时钟配置) | 提供 “系统时钟初始化”(如将 F103 时钟配置为 72MHz,保证时序精度)、“内核中断控制”(发送时序时关中断) |
Libraries/STM32F10x_StdPeriph_Driver/Inc/ | 标准外设库的头文件目录,如stm32f10x_gpio.h | 提供 GPIO 驱动的接口声明(如GPIO_Init()、GPIO_SetBits()),ws2812b.c需调用这些函数操作 GPIO |
Libraries/STM32F10x_StdPeriph_Driver/Src/ | 标准外设库的源文件目录,如stm32f10x_gpio.c | 提供 GPIO 驱动的实现(如GPIO_Init()的具体逻辑),是ws2812b.c调用的 “底层支撑” |
Startup/startup_stm32f10x_md.s | 汇编启动文件,负责初始化堆栈、中断向量表、调用SystemInit和main | 为整个程序提供 “运行环境”,确保 WS2812B 代码能在 C 语言中正常执行 |
5.3 核心代码解析:从主函数到时序生成
(1)主函数 main.c:控制 WS2812B 显示逻辑
c
运行
#include "stm32f10x.h" // STM32F1系列核心头文件
#include "ws2812b.h" // WS2812B自定义驱动头文件
// 自定义延时函数(基于系统时钟,需精确)
void Delay_ms(uint32_t ms) {
uint32_t i, j;
for(i = 0; i < ms; i++)
for(j = 0; j < 7200; j++); // 假设系统时钟72MHz,粗略实现1ms延时
}
int main(void)
{
// 1. 系统初始化:配置系统时钟为72MHz(由CMSIS的system_stm32f10x.c实现)
SystemInit();
// 2. WS2812B初始化:配置GPIO为输出,准备发送数据
ws2812b_Init();
// 3. 主循环:循环显示不同颜色
while(1)
{
// 显示红色(注意WS2812B是GRB顺序,红色是第二个参数)
ws2812b_SetColor(0, 255, 0);
Delay_ms(1000);
// 显示绿色(GRB顺序,第一个参数)
ws2812b_SetColor(255, 0, 0);
Delay_ms(1000);
// 显示蓝色(GRB顺序,第三个参数)
ws2812b_SetColor(0, 0, 255);
Delay_ms(1000);
// 显示白色(三原色全亮)
ws2812b_SetColor(255, 255, 255);
Delay_ms(1000);
// 可扩展:呼吸灯、彩虹循环等更复杂的效果
}
}
(2)WS2812B 驱动 ws2812b.c:时序是核心
c
运行
#include "ws2812b.h"
#include "stm32f10x_gpio.h"
// 定义WS2812B连接的GPIO端口和引脚(可根据飞控板硬件修改)
#define WS2812B_PORT GPIOB
#define WS2812B_PIN GPIO_Pin_5
// 微秒级延时(需精确,否则WS2812B无法正确解析)
static void Delay_us(uint32_t us)
{
// 假设系统时钟为72MHz,1个CPU周期约13.89ns
// 72MHz时,us * 72 约为所需循环次数(简化版,实际需更精确,可使用SysTick)
uint32_t delay = us * 72;
while(delay--);
}
// WS2812B初始化:配置GPIO为推挽输出,高速
void ws2812b_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
// 1. 使能GPIOB的时钟(GPIO属于APB2总线外设)
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// 2. 配置GPIO参数
GPIO_InitStruct.GPIO_Pin = WS2812B_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽输出(高/低电平驱动能力强)
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; // 高速(确保电平切换速度)
GPIO_Init(WS2812B_PORT, &GPIO_InitStruct);
// 3. 初始化为低电平(复位状态)
GPIO_ResetBits(WS2812B_PORT, WS2812B_PIN);
}
// 发送1个字节到WS2812B(生成逻辑0/1的时序)
static void ws2812b_SendByte(uint8_t byte)
{
uint8_t i;
for(i = 0; i < 8; i++) // 逐位发送(从最高位开始)
{
if(byte & 0x80) // 最高位为1,发送“逻辑1”时序
{
GPIO_SetBits(WS2812B_PORT, WS2812B_PIN); // 高电平开始
Delay_us(0.8); // 高电平持续≈800ns
GPIO_ResetBits(WS2812B_PORT, WS2812B_PIN); // 拉低电平
Delay_us(0.45); // 低电平持续≈450ns
}
else // 最高位为0,发送“逻辑0”时序
{
GPIO_SetBits(WS2812B_PORT, WS2812B_PIN); // 高电平开始
Delay_us(0.4); // 高电平持续≈400ns
GPIO_ResetBits(WS2812B_PORT, WS2812B_PIN); // 拉低电平
Delay_us(0.85); // 低电平持续≈850ns
}
byte <<= 1; // 左移一位,准备发送下一位
}
}
// 发送GRB颜色数据到WS2812B(绿色→红色→蓝色)
void ws2812b_SetColor(uint8_t green, uint8_t red, uint8_t blue)
{
// 关闭全局中断:避免时序被中断服务程序打断(WS2812B对时序精度要求极高)
__disable_irq();
// 1. 发送绿色(GRB的第一个颜色)
ws2812b_SendByte(green);
// 2. 发送红色(GRB的第二个颜色)
ws2812b_SendByte(red);
// 3. 发送蓝色(GRB的第三个颜色)
ws2812b_SendByte(blue);
// 发送完成后,保持低电平>50μs,产生“复位信号”
GPIO_ResetBits(WS2812B_PORT, WS2812B_PIN);
Delay_us(50); // 50μs复位
// 开启全局中断
__enable_irq();
}
5.4 实践中的关键注意事项
-
时序精度:WS2812B 对 “高低电平持续时间” 非常敏感,若延时误差过大,会导致颜色显示错误或乱码。解决方法:
- 使用SysTick 定时器或DWT 计数器实现精确延时(比 “循环计数” 更可靠);
- 确保系统时钟配置正确(如通过
SystemInit()将 F103 时钟设为 72MHz,保证延时计算准确)。
-
中断干扰:发送 WS2812B 数据时,若被其他中断(如 USART、TIM 中断)打断,会破坏时序。解决方法:
- 发送数据前,用
__disable_irq()关闭全局中断,发送完成后用__enable_irq()开启; - 若需兼容关键中断,可改用 “原子操作” 或调整中断优先级(让 WS2812B 发送时序的优先级最高)。
- 发送数据前,用
-
多个 WS2812B 级联:飞控板若需控制多个 WS2812B(如做彩灯环),需注意:
- 数据线末端添加匹配电阻(如 100Ω),减少信号反射;
- 确保电源足够(每个 WS2812B 全亮时电流约 60mA,多个时需大功率电源);
- 发送数据时,按 “先送第一个 LED 数据,再送第二个……” 的顺序,一次性发送所有数据。
六、总结与展望
6.1 核心收获
- CMSIS 是 “通用语言”:为不同厂商的 Cortex-M 芯片提供统一的内核、DSP、RTOS 接口,让 “跨芯片开发”“算法复用” 成为可能。无人机飞控的 “姿态解算”“PID 控制” 等算法,可直接基于 CMSIS-DSP 快速实现。
- STM32 固件库是 “硬件操作手册”:将复杂的寄存器操作封装为易用的函数,让开发者无需记忆海量寄存器地址,只需调用 “一句话函数” 即可控制硬件。飞控中的 GPIO、USART、TIM 等外设,都可通过固件库快速配置。
- WS2812B 示例是 “实践窗口”:展示了从 “硬件时序要求” 到 “固件库函数调用” 再到 “用户层逻辑” 的完整流程,体现了 “分层开发” 的优势 —— 底层时序由驱动封装,上层只需关注 “显示什么颜色”。
6.2 未来展望
随着 STM32 系列的发展(如 Cortex-M7、M33 内核的高性能芯片),CMSIS 标准也在持续进化(如支持更先进的 DSP 指令、更安全的 RTOS 接口),STM32 固件库(尤其是 HAL 库)的 “跨系列兼容性” 会进一步增强。对于无人机飞控等领域:
- 硬件上,更强大的 STM32 芯片将支持更多传感器、更高精度的控制;
- 软件上,CMSIS 和固件库将进一步简化 “AI 算法部署”“多传感器融合” 等复杂任务,让开发者能更专注于 “飞控策略创新”。
通过本文的深度解析,希望能帮助你从 “理论认知” 到 “实践应用”,真正掌握 STM32 固件库与 CMSIS 标准的精髓,并能将其灵活运用到无人机飞控、智能硬件等各类嵌入式项目中。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









