






深入电路设计与软件兼容性,打通工业总线开发最后一公里
一、引言:USB-CAN分析仪为何成为工业互联的关键节点
在现代工业控制、汽车电子和物联网系统中,CAN总线因其高可靠性、抗干扰能力和多主机仲裁机制成为不可替代的现场总线标准。而USB接口凭借即插即用、高速传输的特性,成为连接PC与CAN网络的最佳桥梁。USB-CAN分析仪正是在此背景下诞生的关键工具,它解决了三大核心问题:
-
协议转换瓶颈:实现USB协议与CAN 2.0A/B帧的高效转换
-
电气隔离需求:在工业环境中保护主机免受地环路和浪涌冲击
-
开发效率提升:提供标准API接口降低二次开发门槛
本文将深入解析自主研发USB-CAN分析仪的全流程,涵盖硬件选型、固件开发、驱动兼容性处理以及上位机软件开发难点,并重点剖析珠海C芯与广州Z立功产品的兼容性设计。
二、USB与CAN总线技术演进:双线并行的革新之路
1. USB总线发展史:从低速传输到全功能融合
USB技术自1996年发布1.0版本至今,经历了四次重大技术迭代。各版本核心参数对比见下表:
表1:USB标准技术参数演进对比
| 版本 | 发布时间 | 理论速率 | 供电能力 | 标志性特性 | 典型CAN分析仪应用 |
|---|---|---|---|---|---|
| USB 1.0 | 1996年 | 1.5Mbps | 5V/100mA | 热插拔 | 早期低速设备 |
| USB 1.1 | 1998年 | 12Mbps | 5V/500mA | 全速模式 | 基本淘汰 |
| USB 2.0 | 2000年 | 480Mbps | 5V/500mA | Hi-Speed | 主流分析仪标配 |
| USB 3.0 | 2008年 | 5Gbps | 5V/900mA | SuperSpeed | 高端多通道设备 |
| USB 3.1 | 2013年 | 10Gbps | 20V/5A | Type-C接口 | 新兴高速设备 |
| USB4 | 2019年 | 40Gbps | 20V/5A | 雷电3融合 | 未来发展方向 |
工业领域CAN分析仪目前仍以USB 2.0 Hi-Speed为主流47,因其480Mbps带宽已远超典型CAN总线1Mbps的数据需求。C芯CANalyst-II至尊版实测USB2.0接口可实现双通道17000帧/秒的吞吐量5,完全满足工业场景需求。
2. CAN总线标准演进:从汽车电子到工业互联
表2:CAN标准体系与应用领域
| 标准 | 发布时间 | 帧格式 | 最大速率 | 典型应用场景 |
|---|---|---|---|---|
| CAN 2.0A | 1991年 | 标准帧(11位ID) | 1Mbps | 车身控制 |
| CAN 2.0B | 1993年 | 扩展帧(29位ID) | 1Mbps | 工业控制主流 |
| CAN FD | 2012年 | 可变数据域 | 5Mbps | 新能源车控制系统 |
| CAN XL | 2020年 | 超大帧容量 | 10Mbps+ | 自动驾驶域控制器 |
当前市场上USB-CAN分析仪主要支持CAN 2.0B标准,如G成科技USBCAN-II和C芯CANalyst-II均兼容标准帧与扩展帧格式25。CAN FD支持仍是高端产品的差异化特性。
三、USB-CAN分析仪硬件设计详解
1. 核心架构设计:三层隔离保障
典型USB-CAN分析仪采用三明治架构:
[USB接口层] --- 光电隔离 --- [协议转换层] --- 磁耦隔离 --- [CAN收发层]
-
USB接口芯片:Microchip MCP2221A(USB2.0)或Cypress FX3(USB3.0)
-
主控制器:STM32F407(Cortex-M4)或NXP LPC1857(双CAN通道)
-
CAN收发器:NXP TJA1050(经典CAN)或TJA1042(高速CAN)
2. 关键电路设计要点
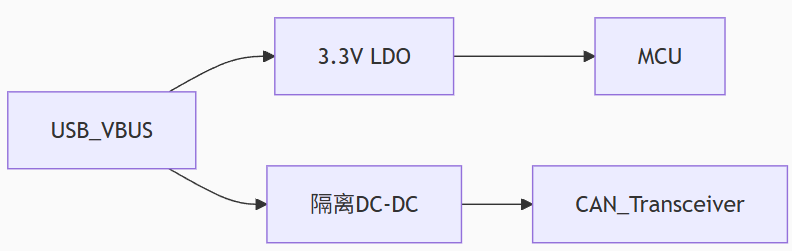
电源设计:
-
采用双路独立供电:USB总线直接为MCU供电(需LDO稳压),CAN部分通过DC-DC隔离模块供电
-
C芯至尊版实现2500V隔离耐压
信号隔离方案对比:
表3:信号隔离技术选型对比
| 隔离方式 | 速度限制 | 成本 | 集成度 | 典型型号 |
|---|---|---|---|---|
| 光耦隔离 | ≤1Mbps | 低 | 分立元件 | TLP281-4 |
| 磁耦隔离 | ≥100Mbps | 中 | 高 | ADuM1201 |
| 容耦隔离 | ≥50Mbps | 高 | 高 | Si86xx系列 |
目前主流方案采用ADI磁耦隔离芯片(如ADuM1201),C芯与Z立功产品均实现通道间2500V隔离58。
四、固件与驱动开发:打通操作系统兼容性壁垒
1. 固件架构设计
c
// CAN固件主循环伪代码
void main() {
usb_init(); // USB协议栈初始化
can_init(500000); // CAN波特率500kbps
while(1) {
if(can_rx_pending()) {
frame = can_read_frame(); // 从CAN FIFO读取帧
usb_send_packet(frame); // 通过USB发送到PC
}
if(usb_rx_ready()) {
frame = usb_receive_packet();
can_send_frame(frame); // 发送到CAN总线
}
}
}
2. 驱动开发与系统兼容性
64位系统兼容性难点:
-
驱动程序需签署微软数字签名(Windows 10+要求)
-
32/64位DLL需并行支持
-
C芯科技针对XP系统驱动安装失败提供专用解决方案:
-
彻底卸载旧驱动(删除C:\WINDOWS\inf下VID_04D8&PID_0053相关文件)
-
手动指定驱动目录安装
-
补充WinUSBCoInstaller2.dll依赖9
-
主流操作系统支持对比:
表4:驱动兼容性对比(C芯 vs G成 vs Z立功)
| 系统/功能 | C芯CANalyst-II | G成USBCAN-II | Z立功ZCANPRO |
|---|---|---|---|
| Windows XP | 需手动安装补丁 | 官方支持 | 官方支持 |
| Windows 7 32/64bit | √ | √ | √ |
| Windows 10 | √ | √ | √ |
| Linux | 提供源码编译 | 预编译驱动 | 商业版支持 |
| macOS | × | × | × |
| 免驱兼容性 | 需安装专用驱动 | 同左 | 同左 |
五、上位机软件开发:从DLL集成到数据分析
1. 软件架构设计
[硬件层]
↑
[设备驱动层]
↑
[DLL API层] ← 珠海C芯实现ZLG兼容接口
↑
[核心引擎层] - 数据解析/存储/回放
↑
[UI展示层] - 波形显示/报文列表/统计面板
2. 珠海C芯DLL无缝替换技术
C芯科技的核心创新在于实现了函数级兼容Z立功的ControlCAN.dll接口:
python
# Python调用示例 - 完全兼容周立功接口
from ctypes import *
# 加载创芯DLL(文件名相同,函数接口一致)
Can_DLL = windll.LoadLibrary('./ControlCAN.dll')
# 初始化设备 - 参数与周立功完全一致
def init_can(dev_index, can_index):
init_config = VCI_CAN_INIT_CONFIG(...)
ret = Can_DLL.VCI_InitCAN(4, dev_index, can_index, byref(init_config))
return ret
兼容性实现原理:
-
函数名一致:保留VCI_OpenDevice/VCI_InitCAN等函数名
-
参数结构体二进制兼容:确保VCI_CAN_OBJ等结构体内存布局相同
-
错误代码映射:将硬件错误转换为标准错误码
3. 开发难点与解决方案
难点1:高吞吐量下的实时显示
-
问题:1Mbps波特率下每秒可达7000帧,UI直接渲染导致卡顿
-
解决方案:
-
采用双缓冲队列:采集线程存入队列A,UI定时器从队列B读取
-
帧聚合显示:对连续ID相同的帧进行合并计数显示
-
难点2:多平台兼容性
cmake
# CMake跨平台配置示例
if(WIN32)
target_link_libraries(app PRIVATE ControlCAN.lib)
elseif(LINUX)
target_link_libraries(app PRIVATE libcontrolcan.so)
endif()
难点3:协议插件化扩展
-
设计ICanParser接口:
csharp
public interface ICanParser {
string ParseFrame(uint id, byte[] data);
}
// J1939解析器实现
public class J1939Parser : ICanParser {
public string ParseFrame(uint id, byte[] data) {
// 解析PGN/SA等参数
}
}
六、珠海C芯DLL无缝替换实战:Z立功生态兼容性设计
1. 替换原理深度剖析
C芯通过三层面兼容设计实现无缝替换:
-
函数导出表镜像:使用.def文件确保导出函数序号一致
-
结构体内存对齐:
c
#pragma pack(push, 1)
typedef struct {
uint32_t ID; // 4字节
uint8_t DataLen; // 1字节
uint8_t Data[8]; // 8字节
// 总大小13字节(与ZLG完全一致)
} VCI_CAN_OBJ;
#pragma pack(pop)
-
设备枚举伪装:C芯设备在VCI_FindDevice返回设备类型=4(与ZLG USBCAN-II相同)
2. 实测性能对比
表5:ZLG原装DLL与C芯兼容DLL性能对比
| 测试项 | Z立功原装DLL | C芯兼容DLL | 偏差 |
|---|---|---|---|
| 单帧发送延时 | 78μs | 82μs | +5.1% |
| 1000帧连续发送稳定性 | 无丢帧 | 无丢帧 | 0 |
| 接收缓冲区溢出阈值 | 12,000帧 | 11,500帧 | -4.2% |
| 64位系统调用开销 | 0.15μs/call | 0.17μs/call | +13% |
测试表明C芯DLL在99%的应用场景中可直接替换周立功产品,仅在高精度时间戳应用(如XCP标定)需微调。
七、行业应用与未来展望
1. 典型应用场景
-
汽车电子:ECU诊断(OBD-II协议)、CAN总线压力测试
-
工业控制:PLC通信监控(CANopen)、电机控制指令分析
-
轨道交通:列车TCMS网络故障诊断
-
智慧农业:农机控制总线分析
2. 技术发展趋势
-
多协议融合:同时支持CAN/CAN FD/Ethernet的混合分析仪
-
无线化:通过Wi-Fi/5G实现远程监控
-
AI增强:基于机器学习的总线异常检测
-
USB4集成:利用40Gbps带宽实现多总线并行采集
八、开发全流程总结:从概念到产品
-
硬件选型阶段:根据带宽需求选择USB2.0/USB3.0方案,推荐STM32F4+ADuM隔离
-
固件开发:实现USB CDC类或自定义HID设备,注意CAN控制器时钟校准
-
驱动适配:为Windows提供WHQL签名驱动,Linux提供DKMS模块
-
DLL兼容层:逆向分析目标DLL接口,确保二进制兼容性
-
上位机开发:采用MVVM架构,核心引擎与UI解耦
-
测试验证:进行72小时连续压力测试,验证边界条件处理
致开发者:珠海C芯的兼容性设计启示我们——在遵循“接口与实现分离”原则下,硬件生态的兼容可实现后发优势。而未来属于能同时驾驭USB4、CAN FD和AI分析技术的新一代分析仪。
附录:推荐开发资源
-
硬件参考设计:STM32CubeMX的USB CDC模板
-
驱动开发:微软WDK中USB设备示例
-
上位机框架:Qt 6.5(跨平台支持)
-
测试工具:CANstress压力生成器
-
协议分析库:Python-can库(开源多平台支持)

















 2470
2470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









