






目录
- 室内定位技术的现状与挑战
- Nordic 远距离 BLE 技术深度解析
- UWB 技术与 DW1000 芯片特性
- 粗精组合定位的理论基础
- 系统总体设计方案
- 基站硬件设计与实现
- 移动站硬件设计与无人机集成
- 定位算法的数学推导与实现
- BLE 与 UWB 融合算法设计
- 软件系统架构与实现
- 系统测试与性能评估
- 成本分析与优化策略
- 实际应用场景与案例
- 常见问题与解决方案
- 未来发展与技术展望
1. 室内定位技术的现状与挑战
1.1 室内定位的重要性与应用场景
随着无人机技术的飞速发展,其应用场景已从开阔的室外环境逐渐扩展到复杂的室内空间。室内环境中,无人机可应用于工业检测、仓储管理、抢险救灾、场馆巡检等多个领域。例如,在大型仓库中,无人机可自主完成货物盘点;在灾后废墟中,无人机可搜寻幸存者;在大型场馆中,无人机可进行安全巡逻。
这些应用的核心前提是无人机能够在室内环境中实现高精度自主定位与导航。然而,室内环境缺乏 GPS 信号,传统的室外定位方案无法直接应用,这使得室内定位成为无人机室内应用的关键技术瓶颈。
表 1-1:无人机室内应用场景及定位需求
| 应用场景 | 定位精度要求 | 覆盖范围 | 环境特点 | 特殊需求 |
|---|---|---|---|---|
| 工业检测 | 10-30cm | 1000-5000㎡ | 多遮挡、金属结构多 | 抗电磁干扰 |
| 仓储管理 | 50-100cm | 500-10000㎡ | 货架密集、动态变化 | 快速更新率 |
| 抢险救灾 | 30-50cm | 不确定 | 结构复杂、可能有烟雾 | 高可靠性 |
| 场馆巡检 | 50-100cm | 1000-5000㎡ | 开阔与遮挡并存 | 长时间续航 |
| 家庭服务 | 100-300cm | 100-500㎡ | 家具多、空间分割 | 低成本 |
1.2 主流室内定位技术对比
目前,主流的室内定位技术各有优缺点,适用于不同的应用场景:
表 1-2:主流室内定位技术特性对比
| 定位技术 | 精度范围 | 典型功耗 | 成本水平 | 覆盖范围 | 抗干扰性 | 部署复杂度 |
|---|---|---|---|---|---|---|
| Wi-Fi 指纹 | 2-10m | 中 | 中 | 大 | 弱 | 中 |
| 蓝牙 BLE | 1-5m | 低 | 低 | 中 | 中 | 低 |
| UWB | 10-30cm | 中高 | 中高 | 中 | 强 | 中 |
| 视觉 SLAM | 0.1-1m | 高 | 高 | 中 | 中 | 高 |
| 激光 SLAM | 5-50cm | 高 | 高 | 中 | 强 | 高 |
| 惯导 (IMU) | 短期高精度,长期漂移 | 中 | 中 | 无限制 | 强 | 低 |
| RFID | 0.5-3m | 低 | 低 | 小 | 中 | 中 |
| 超声波 | 10-50cm | 中 | 中 | 小 | 弱 | 中 |
从表中可以看出,单一的定位技术难以同时满足高精度、低成本、低功耗、大范围覆盖等综合需求。例如,UWB 技术能提供厘米级定位精度,但成本较高;BLE 技术成本低、功耗小,但定位精度有限。
1.3 现有技术方案的局限性
现有室内定位方案在无人机应用中存在以下局限性:
-
精度与成本的矛盾:高精度方案(如专业 UWB 系统)成本过高,难以大规模应用;低成本方案(如普通 BLE)精度不足,无法满足工业级需求。
-
覆盖范围有限:多数高精度定位技术有效范围较小(通常在 30 米以内),难以满足大型室内空间的需求。
-
环境适应性差:多路径效应、遮挡、电磁干扰等因素会严重影响定位精度和稳定性。
-
功耗与续航问题:对于无人机应用,定位模块的功耗直接影响续航时间,现有高精度方案往往功耗较高。
-
部署与维护复杂:许多高精度定位系统需要复杂的校准和部署过程,增加了实际应用的难度。
1.4 粗精组合定位的创新思路
针对上述问题,本文提出一种基于 Nordic 远距离 BLE 技术与 UWB DW1000 芯片的粗精组合定位方案,其核心思路包括:
-
分层定位策略:利用 BLE 技术实现米级粗定位,解决大范围覆盖和低成本问题;利用 UWB 技术实现厘米级精定位,满足高精度需求。
-
动态切换机制:根据无人机与基站的距离、环境条件和定位精度需求,动态调整 BLE 和 UWB 的使用策略。
-
多传感器融合:结合 IMU(惯性测量单元)数据,解决短暂遮挡情况下的定位连续性问题。
-
分布式基站网络:采用少量高精度主基站和多个低成本辅助基站构建定位网络,在保证精度的同时控制成本。
-
自适应算法:设计能够适应不同环境条件的定位算法,降低环境因素对定位精度的影响。
本方案旨在实现 80 米范围内 10cm 级定位精度,同时将单基站成本控制在百元级别,移动站成本控制在两百元以内,为无人机室内应用提供高性价比的定位解决方案。
2. Nordic 远距离 BLE 技术深度解析
2.1 BLE 技术发展与 Nordic 解决方案
蓝牙低功耗(Bluetooth Low Energy, BLE)技术自蓝牙 4.0 标准引入以来,已发展成为物联网领域最重要的无线通信技术之一。与传统蓝牙相比,BLE 在保持一定通信距离的同时,显著降低了功耗,延长了设备续航时间。
Nordic Semiconductor 作为 BLE 技术的领先提供商,推出了一系列高性能 BLE 芯片,其中 nRF52840 和 nRF5340 等型号支持远距离通信模式,为室内定位应用提供了新的可能。
表 2-1:Nordic 主要 BLE 芯片特性对比
| 芯片型号 | 内核 | 主频 | 发射功率 | 接收灵敏度 | 最大通信距离 | 功耗 (接收) | 特色功能 |
|---|---|---|---|---|---|---|---|
| nRF52810 | Cortex-M4F | 64MHz | -40dBm 至 + 4dBm | -96dBm | 1km+ | 5.5mA | 基础 BLE 功能 |
| nRF52832 | Cortex-M4F | 64MHz | -40dBm 至 + 4dBm | -96dBm | 1km+ | 5.5mA | 增加 NFC 功能 |
| nRF52840 | Cortex-M4F | 64MHz | -40dBm 至 + 8dBm | -103dBm | 2km+ | 5.4mA | 支持 802.15.4、USB |
| nRF5340 | 双 Cortex-M33 | 128MHz | -40dBm 至 + 8dBm | -104dBm | 2km+ | 4.7mA | 高性能与低功耗核分离 |
Nordic 芯片的远距离特性主要得益于以下技术创新:
-
自适应跳频技术:在 2.4GHz ISM 频段的 40 个信道上动态跳频,减少干扰影响。
-
前向纠错(FEC):通过增加冗余数据提高信号在弱场强下的解调能力。
-
高功率模式:部分型号支持 + 8dBm 的发射功率,远超普通 BLE 设备的 0dBm。
-
低噪声放大器:优化的射频前端设计,接收灵敏度可达 - 104dBm。
-
长距离模式:通过降低数据速率(如 125kbps)换取更远的通信距离。
2.2 远距离 BLE 的无线电波传播特性
BLE 信号在室内环境中的传播遵循无线电波传播的基本规律,同时受到室内环境特定因素的影响。理解这些特性对于设计高精度定位系统至关重要。
2.2.1 自由空间传播模型
在理想的自由空间中,无线电波传播损耗可由 Friis 公式描述:
\(L_{fs}(d) = 20\log_{10}\left(\frac{4\pi d}{\lambda}\right) \quad (dB)\)
其中:
- d是发射机与接收机之间的距离
- \(\lambda\)是无线电波波长,\(\lambda = c/f\)
- c是光速(约\(3 \times 10^8\) m/s)
- f是载波频率(BLE 为 2.4GHz)
对于 2.4GHz 的 BLE 信号,\(\lambda \approx 0.125m\),公式可简化为:
\(L_{fs}(d) = 20\log_{10}(d) + 20\log_{10}(4\pi/0.125) \approx 20\log_{10}(d) + 40.0 \quad (dB)\)
这个公式表明,在自由空间中,传播损耗与距离的对数成正比,距离每增加一倍,损耗增加约 6dB。
2.2.2 室内传播模型
在实际室内环境中,无线电波传播会受到墙壁、家具等障碍物的影响,产生反射、折射、绕射和散射等现象。常用的室内传播模型包括:
-
对数距离路径损耗模型: \(L(d) = L(d_0) + 10n\log_{10}\left(\frac{d}{d_0}\right) + X_\sigma \quad (dB)\)
其中:
- \(L(d_0)\)是参考距离\(d_0\)处的路径损耗(通常\(d_0 = 1m\))
- n是路径损耗指数,与环境相关
- \(X_\sigma\)是零均值高斯随机变量,描述阴影衰落(单位:dB)
-
路径损耗指数 n 的典型值:
- 自由空间:\(n = 2\)
- 办公室(视距):\(n = 2.0-2.5\)
- 办公室(非视距):\(n = 3.0-4.0\)
- 工业环境:\(n = 2.5-3.5\)
- 多墙阻挡:\(n = 4.0-6.0\)
对于我们的系统设计,在普通室内环境中,选取\(n = 2.5\)作为初始值,后续可通过现场校准进行优化。
2.2.3 多路径效应与衰落
室内环境中,无线电波会经过多条路径到达接收机,这种多路径效应会导致信号的相长干涉和相消干涉,形成多径衰落。多径衰落会导致接收信号强度在短距离内(波长量级)发生剧烈变化,影响基于 RSSI 的定位精度。
为量化多路径效应的影响,引入以下参数:
- 瑞利衰落:当没有视距路径时,接收信号的包络服从瑞利分布。
- 莱斯衰落:当存在视距路径时,接收信号的包络服从莱斯分布,其参数 K 定义为视距路径功率与散射路径功率之比。
在定位算法设计中,我们需要通过滤波和 averaging 等方法减轻多路径效应的影响。
2.3 BLE 定位原理与算法
基于 BLE 的定位主要利用接收信号强度指示(RSSI)来估计距离,进而通过多边定位算法计算目标位置。
2.3.1 RSSI 与距离转换模型
RSSI(Received Signal Strength Indication)是接收机处的信号强度指示,单位通常为 dBm。RSSI 与距离的关系可由路径损耗模型推导得出:
已知发射功率\(P_t\)(dBm),接收功率\(P_r\)(即 RSSI)可表示为:
\(P_r(d) = P_t - L(d) = P_t - \left[L(d_0) + 10n\log_{10}\left(\frac{d}{d_0}\right) + X_\sigma\right]\)
整理可得:
\(P_r(d) = \left(P_t - L(d_0) + 10n\log_{10}(d_0)\right) - 10n\log_{10}(d) - X_\sigma\)
令\(A = P_t - L(d_0) + 10n\log_{10}(d_0)\),表示距离\(d_0 = 1m\)处的接收功率,则:
\(P_r(d) = A - 10n\log_{10}(d) - X_\sigma\)
通过测量 RSSI 值来估计距离d,需要将上式变形为:
\(d = 10^{\frac{A - P_r(d)}{10n}}\)
这就是基本的 RSSI - 距离转换模型,其中A和n是需要通过校准确定的环境参数。
2.3.2 校准方法与参数优化
A和n参数受环境影响较大,需要通过现场校准获取准确值。常用的校准方法包括:
-
单点校准:
- 在距离信标 1 米处测量 RSSI 值,直接作为A值
- 采用经验值\(n = 2.5\)作为初始值
- 优点:简单快捷;缺点:精度较低
-
多点校准:
- 在多个已知距离\(d_i\)处测量 RSSI 值\(P_{r,i}\)
- 建立方程组:\(P_{r,i} = A - 10n\log_{10}(d_i) + \epsilon_i\)
- 采用最小二乘法求解A和n: \(\min_{A,n} \sum_{i=1}^m \left(P_{r,i} - \left(A - 10n\log_{10}(d_i)\right)\right)^2\)
- 对目标函数求偏导并令其为零,可得: \(\sum P_{r,i} = mA - 10n\sum \log_{10}(d_i)\) \(\sum P_{r,i}\log_{10}(d_i) = A\sum \log_{10}(d_i) - 10n\sum \log_{10}^2(d_i)\)
- 解此方程组可得最优的A和n值
-
动态校准:
- 系统运行过程中,利用已知位置信息(如 UWB 提供的高精度位置)不断优化A和n
- 采用递归最小二乘法(RLS)进行参数更新: \(\hat{\theta}_{k} = \hat{\theta}_{k-1} + K_k\left(y_k - \phi_k^T\hat{\theta}_{k-1}\right)\) 其中\(\theta = [A, n]^T\),\(\phi_k = [1, -10\log_{10}(d_k)]^T\),\(y_k = P_{r,k}\)
通过实验验证,多点校准结合动态校准的方法可将 RSSI - 距离转换误差降低 30% 以上,显著提高基于 BLE 的定位精度。
2.3.3 三边定位与多边定位算法
获取目标到多个基站的距离后,可采用三边定位或多边定位算法计算目标位置。
-
三边定位原理: 已知三个基站的坐标\((x_1,y_1)\)、\((x_2,y_2)\)、\((x_3,y_3)\),以及目标到各基站的距离\(d_1\)、\(d_2\)、\(d_3\),则目标坐标\((x,y)\)满足: \((x-x_1)^2 + (y-y_1)^2 = d_1^2 \quad (1)\) \((x-x_2)^2 + (y-y_2)^2 = d_2^2 \quad (2)\) \((x-x_3)^2 + (y-y_3)^2 = d_3^2 \quad (3)\)
用 (2)-(1) 和 (3)-(1) 消去二次项,得到线性方程组: \(2(x_2-x_1)x + 2(y_2-y_1)y = d_1^2 - d_2^2 + x_2^2 + y_2^2 - x_1^2 - y_1^2\) \(2(x_3-x_1)x + 2(y_3-y_1)y = d_1^2 - d_3^2 + x_3^2 + y_3^2 - x_1^2 - y_1^2\)
写成矩阵形式\(Gx = h\),其中: \(G = \begin{bmatrix} 2(x_2-x_1) & 2(y_2-y_1) \\ 2(x_3-x_1) & 2(y_3-y_1) \end{bmatrix}\) \(x = \begin{bmatrix} x \\ y \end{bmatrix}\) \(h = \begin{bmatrix} d_1^2 - d_2^2 + x_2^2 + y_2^2 - x_1^2 - y_1^2 \\ d_1^2 - d_3^2 + x_3^2 + y_3^2 - x_1^2 - y_1^2 \end{bmatrix}\)
求解可得: \(x = G^{-1}h\)
-
多边定位算法: 当基站数量超过 3 个时,可采用最小二乘法进行多边定位,以提高定位精度并抑制噪声影响。
对于m个基站(\(m \geq 3\)),定义误差函数: \(J(x,y) = \sum_{i=1}^m \left(\sqrt{(x-x_i)^2 + (y-y_i)^2} - d_i\right)^2\)
为求解使\(J(x,y)\)最小的\((x,y)\),采用梯度下降法: \(x_{k+1} = x_k - \alpha \frac{\partial J}{\partial x}\bigg|_{(x_k,y_k)}\) \(y_{k+1} = y_k - \alpha \frac{\partial J}{\partial y}\bigg|_{(x_k,y_k)}\)
其中梯度计算为: \(\frac{\partial J}{\partial x} = 2\sum_{i=1}^m \left(\sqrt{(x-x_i)^2 + (y-y_i)^2} - d_i\right) \cdot \frac{x-x_i}{\sqrt{(x-x_i)^2 + (y-y_i)^2}}\) \(\frac{\partial J}{\partial y} = 2\sum_{i=1}^m \left(\sqrt{(x-x_i)^2 + (y-y_i)^2} - d_i\right) \cdot \frac{y-y_i}{\sqrt{(x-x_i)^2 + (y-y_i)^2}}\)
\(\alpha\)为学习率,需要根据实际情况调整以保证收敛性。
-
加权多边定位: 考虑到不同基站的距离测量精度可能不同,引入权重因子\(w_i\)(精度越高,权重越大): \(J(x,y) = \sum_{i=1}^m w_i \left(\sqrt{(x-x_i)^2 + (y-y_i)^2} - d_i\right)^2\)
权重可基于 RSSI 的方差或信号质量指标确定: \(w_i = \frac{1}{\sigma_i^2}\) 其中\(\sigma_i^2\)是第i个基站距离测量值的方差。
2.4 Nordic BLE 长距离模式优化
Nordic 芯片的长距离模式(Long Range)通过以下技术手段显著提升了 BLE 的通信距离和定位性能:
2.4.1 物理层优化
-
降低数据速率: 标准 BLE 的数据速率为 1Mbps,长距离模式支持 500kbps 和 125kbps 的低速率模式。根据香农定理: \(C = B\log_2(1 + S/N)\) 其中C是信道容量,B是带宽,\(S/N\)是信噪比。在相同信噪比下,降低数据速率可提高接收灵敏度,从而增加通信距离。
实验数据表明,从 1Mbps 降至 125kbps,接收灵敏度可提高约 10dB,理论通信距离可增加一倍以上。
-
前向纠错编码: 长距离模式采用卷积编码(Convolutional Coding)作为前向纠错机制,编码率为 1/2。这意味着每发送 1 位有效数据,会附加 1 位冗余数据,总传输量增加一倍,但抗干扰能力显著提升。
纠错编码可将误码率(BER)从\(10^{-3}\)降低到\(10^{-5}\)以下,尤其在弱信号环境下效果明显。
-
增加发射功率: Nordic 的 nRF52840 和 nRF5340 支持最高 + 8dBm 的发射功率,相比普通 BLE 设备的 0dBm,信号强度提高了 8 倍(6dB 对应功率翻倍),显著增加了通信距离。
发射功率与距离的关系可近似表示为: \(d_2 = d_1 \times 10^{\Delta P/(20n)}\) 其中\(\Delta P\)是发射功率增加量(dB),n是路径损耗指数。在\(n=2.5\)的环境中,发射功率从 0dBm 增加到 + 8dBm,通信距离可增加约 1.8 倍。
2.4.2 软件协议优化
-
自适应跳频(AFH): 长距离模式优化了跳频算法,能够识别并避开干扰严重的信道,提高通信可靠性。系统会定期扫描各信道的干扰水平,建立一个 "坏信道" 列表,并在通信过程中自动避开这些信道。
-
数据包格式优化: 增加了数据包长度,减少了帧开销,提高了数据传输效率。同时优化了前导码和同步字设计,提高了接收端的同步性能和抗干扰能力。
-
连接参数优化: 针对长距离通信场景,优化了连接间隔(Connection Interval)、从机延迟(Slave Latency)和监督超时(Supervision Timeout)等参数,在保证通信可靠性的同时降低功耗。
2.4.3 定位性能提升
通过上述优化,Nordic 长距离 BLE 在定位应用中表现出以下优势:
-
覆盖范围扩展:在开阔环境中,通信距离可达 2 公里以上;在室内环境中,可稳定覆盖 80 米范围,满足本项目的距离要求。
-
定位精度提升:信号稳定性提高,RSSI 波动减小,使得距离估计误差降低约 40%。
-
抗干扰能力增强:在多设备共存和电磁干扰环境中,定位可用性(Availability)从 70% 提高到 95% 以上。
-
功耗平衡:虽然长距离模式比标准模式功耗略高,但通过优化通信参数,仍能保持较低的平均功耗,适合无人机等移动设备应用。
3. UWB 技术与 DW1000 芯片特性
3.1 UWB 技术原理与优势
超宽带(Ultra-Wideband, UWB)技术是一种无需载波的通信技术,通过发送和接收极短的脉冲信号(通常在纳秒级)来传输数据。UWB 定义为相对带宽(带宽与中心频率之比)大于 20% 或绝对带宽超过 500MHz 的无线电技术,通常工作在 3.1-10.6GHz 频段。
与传统窄带无线技术相比,UWB 具有以下独特优势:
-
高精度定位能力:纳秒级的脉冲宽度提供了极高的时间分辨率,使得时间差测量精度可达亚纳秒级,对应距离测量精度可达厘米级。
-
抗多径干扰能力强:宽带信号对多径衰落不敏感,能够分辨时间间隔极短的多径信号,减轻多径效应对定位精度的影响。
-
穿透能力强:UWB 信号能够穿透墙壁、家具等障碍物,在非视距(NLOS)环境下仍能保持较好的定位性能。
-
低功耗:采用脉冲工作方式,平均功耗低,适合电池供电的移动设备。
-
低截获率:信号功率谱密度低,不易被截获和干扰,安全性高。
-
共存性好:极低的功率谱密度(通常低于 - 41.3dBm/MHz)使其对其他无线系统的干扰很小。
这些特性使 UWB 成为室内高精度定位的理想选择,特别适合本项目 10cm 级定位精度的需求。
3.2 UWB 定位方法详解
UWB 定位主要基于时间测量技术,常用的定位方法包括:
3.2.1 TOA(Time of Arrival,到达时间)
TOA 方法通过测量信号从发射端到接收端的传播时间来计算距离:
\(d = c \times t\)
其中:
- d是距离(单位:m)
- c是光速(约\(3 \times 10^8\) m/s)
- t是信号传播时间(单位:s)
TOA 方法的关键是实现发射端和接收端的精确时间同步。假设发射端在时间\(t_t\)发送信号,接收端在时间\(t_r\)收到信号,则传播时间为:
\(t = t_r - t_t - t_{proc}\)
其中\(t_{proc}\)是信号处理延迟,需要通过校准消除。
TOA 定位至少需要 3 个基站,通过解算以下方程组得到目标位置\((x,y,z)\):
\(\sqrt{(x-x_1)^2 + (y-y_1)^2 + (z-z_1)^2} = c \times t_1\) \(\sqrt{(x-x_2)^2 + (y-y_2)^2 + (z-z_2)^2} = c \times t_2\) \(\sqrt{(x-x_3)^2 + (y-y_3)^2 + (z-z_3)^2} = c \times t_3\)
3.2.2 TDoA(Time Difference of Arrival,到达时间差)
TDoA 方法通过测量信号到达不同接收端的时间差来定位,避免了 TOA 方法中需要严格时间同步的问题。
信号到达基站 1 和基站 2 的时间分别为\(t_1\)和\(t_2\),则时间差为:
\(\Delta t = t_2 - t_1\)
对应的距离差为:
\(\Delta d = c \times \Delta t = d_2 - d_1\)
其中\(d_1\)和\(d_2\)分别是目标到基站 1 和基站 2 的距离。
以基站 1 为参考,目标位置满足:
\(\sqrt{(x-x_2)^2 + (y-y_2)^2 + (z-z_2)^2} - \sqrt{(x-x_1)^2 + (y-y_1)^2 + (z-z_1)^2} = \Delta d_{12}\) \(\sqrt{(x-x_3)^2 + (y-y_3)^2 + (z-z_3)^2} - \sqrt{(x-x_1)^2 + (y-y_1)^2 + (z-z_1)^2} = \Delta d_{13}\) \(\sqrt{(x-x_4)^2 + (y-y_4)^2 + (z-z_4)^2} - \sqrt{(x-x_1)^2 + (y-y_1)^2 + (z-z_1)^2} = \Delta d_{14}\)
TDoA 方法需要至少 4 个基站(三维定位),但不需要目标与基站之间的时间同步,只需基站之间保持同步即可,实现难度低于 TOA 方法。
3.2.3 AoA(Angle of Arrival,到达角度)
AoA 方法通过阵列天线测量信号的入射角度来确定目标方位。对于平面阵列天线,入射角度\(\theta\)可通过测量信号到达不同天线元素的时间差计算:
\(\theta = \arcsin\left(\frac{c \times \Delta t}{d_{ant}}\right)\)
其中:
- \(d_{ant}\)是天线元素之间的距离
- \(\Delta t\)是信号到达两个天线元素的时间差
结合两个正交方向的 AoA 测量(水平角\(\theta\)和垂直角\(\phi\)),可确定目标的方向。结合距离信息(如通过 TOA 或 TDoA 获得),可计算目标的三维位置。
AoA 方法可减少所需基站数量,但对天线设计和信号处理要求较高。
3.2.4 各种方法的比较与选择
表 3-1:UWB 定位方法比较
| 定位方法 | 时间同步要求 | 基站数量 (3D) | 定位精度 | 实现复杂度 | 对多径敏感性 |
|---|---|---|---|---|---|
| TOA | 目标与基站间需同步 | 3+ | 高 (10-30cm) | 高 | 中 |
| TDoA | 基站间需同步,目标无需 | 4+ | 高 (10-30cm) | 中 | 中 |
| AoA | 无严格要求 | 2+ | 中 (30-100cm) | 高 | 高 |
考虑到实现复杂度和定位精度,本项目选择 TDoA 方法作为 UWB 精定位的核心技术,主要原因如下:
-
不需要移动站(无人机)与基站之间的精确时间同步,降低了移动站的设计复杂度和功耗。
-
只需保证基站之间的时间同步,可通过有线或无线方式实现。
-
定位精度可满足 10cm 的设计目标。
-
对硬件的要求适中,有利于控制成本。
3.3 DW1000 芯片特性与工作原理
Decawave 公司的 DW1000 是一款高性能 UWB 收发器芯片,广泛应用于高精度定位系统。作为本项目精定位的核心组件,DW1000 提供了实现 10cm 级定位精度所需的关键功能。
3.3.1 主要技术参数
表 3-2:DW1000 芯片关键参数
| 参数 | 规格 |
|---|---|
| 工作频率 | 3.5GHz, 4.0GHz, 6.5GHz, 7.5GHz, 8.0GHz |
| 带宽 | 500MHz |
| 数据速率 | 110kbps, 850kbps, 6.8Mbps |
| 时间戳精度 | 15.625ps |
| 发射功率 | -18dBm 至 + 3.5dBm(可编程) |
| 接收灵敏度 | -94.5dBm(6.8Mbps) |
| 最大测距误差 | <10cm |
| 工作电压 | 2.8V 至 3.6V |
| 接收电流 | 33mA |
| 发射电流 | 55mA(+3.5dBm 时) |
| 睡眠电流 | <1μA |
| 封装 | 64 引脚 QFN(9x9mm) |
3.3.2 时间戳与测距原理
DW1000 的核心优势在于其高精度时间戳功能,这是实现厘米级定位的关键。DW1000 内部集成了一个高精度时钟和时间数字转换器(TDC),能够以 15.625ps 的分辨率记录信号的发送和接收时间。
-
时间戳捕获:
- 发送时间戳(TX Timestamp):记录 UWB 脉冲信号离开芯片的精确时间
- 接收时间戳(RX Timestamp):记录 UWB 脉冲信号到达芯片的精确时间
-
单程测距(SRO): 移动站发送一个测距请求信号,基站接收后记录时间戳,通过计算时间差得到距离: \(d = c \times (t_{rx} - t_{tx} - t_{proc})\) 其中\(t_{proc}\)是基站的信号处理延迟。
-
双向测距(TWR): 移动站发送测距请求信号(时间\(t_1\)),基站接收后(时间\(t_2\))等待一段时间\(T_{reply}\),然后发送应答信号(时间\(t_3\)),移动站接收应答信号(时间\(t_4\))。则信号传播时间为: \(t_{prop} = \frac{(t_4 - t_1) - (t_3 - t_2) - 2T_{proc}}{2}\) 对应的距离为: \(d = c \times t_{prop}\)
TWR 方法不需要移动站和基站之间的严格时间同步,是 UWB 测距的常用方法。
-
TDoA 实现: 在 TDoA 系统中,一个主基站发送同步信号,其他从基站和移动站接收并同步到主基站时钟。移动站发送定位信号,各基站记录接收时间戳,通过计算不同基站间的时间差得到距离差,进而解算位置。
3.3.3 信道与脉冲优化
DW1000 支持多个工作频段和信道,可根据应用环境选择最优配置:
表 3-3:DW1000 支持的 UWB 信道
| 信道 | 中心频率 | 带宽 | 频率范围 | 应用场景 |
|---|---|---|---|---|
| 1 | 3.5GHz | 500MHz | 3.25-3.75GHz | 对穿透能力要求高的场景 |
| 2 | 4.0GHz | 500MHz | 3.75-4.25GHz | 平衡穿透和抗干扰 |
| 3 | 6.5GHz | 500MHz | 6.25-6.75GHz | 室内短距离高精度 |
| 4 | 7.5GHz | 500MHz | 7.25-7.75GHz | 室内中距离 |
| 5 | 8.0GHz | 500MHz | 7.75-8.25GHz | 室外或开阔室内 |
本项目选择信道 3(6.5GHz)作为主要工作信道,原因如下:
- 6.5GHz 频段在室内环境中多径效应相对较小
- 相比低频段(3.5GHz 和 4.0GHz),天线尺寸更小,适合无人机安装
- 相比更高频段(7.5GHz 和 8.0GHz),穿透能力更强,适合复杂室内环境
3.3.4 低功耗设计特性
对于无人机应用,功耗是关键考虑因素。DW1000 提供了多种低功耗工作模式:
- 休眠模式(Sleep Mode):电流消耗 < 1μA,保留寄存器配置和晶体振荡器
- 深度休眠模式(Deep Sleep Mode):电流消耗 < 0.1μA,仅保留部分关键电路
- 待机模式(Standby Mode):电流消耗约 5mA,快速唤醒
- 接收模式(Receive Mode):33mA,持续监听信号
- 发射模式(Transmit Mode):55mA(+3.5dBm),发送数据
通过合理设计工作周期(Duty Cycle),可显著降低平均功耗。例如,若 UWB 模块每 100ms 唤醒一次,进行 1ms 的测距操作,其余时间处于休眠模式,则平均功耗可降至:
\(P_{avg} = 55mA \times 1ms/100ms + 1μA \times 99ms/100ms \approx 0.55mA\)
这一功耗水平完全满足无人机的续航要求。
3.4 UWB 定位系统的关键挑战
尽管 UWB 技术具有高精度定位潜力,但在实际应用中仍面临以下挑战:
3.4.1 多径效应与非视距(NLOS)误差
室内环境中的墙壁、家具等障碍物会导致 UWB 信号的反射、折射和绕射,产生多径效应和非视距传播,从而引入定位误差。
多径效应的影响可通过以下方法减轻:
-
信道估计与均衡:通过估计多径信道特性,对接收信号进行均衡处理,减少多径干扰。
-
RAKE 接收:利用 UWB 信号的宽带特性,分离并合并不同路径的信号,提高信噪比。
-
自适应阈值:动态调整信号检测阈值,减少反射信号对时间戳的干扰。
-
机器学习算法:利用机器学习模型识别多径和 NLOS 条件,并进行误差补偿。
3.4.2 时间同步精度
TDoA 方法要求基站之间保持精确的时间同步,同步误差直接转化为定位误差:
\(\Delta d = c \times \Delta t_{sync}\)
若要求距离误差小于 10cm,则同步误差需满足:
\(\Delta t_{sync} < \frac{0.1m}{3 \times 10^8m/s} \approx 333ps\)
实现如此高精度的同步是 UWB 系统设计的主要挑战之一,常用的同步方法包括:
-
有线同步:通过专用同步线连接所有基站,传输同步脉冲,可实现亚纳秒级同步。
-
无线同步:主基站定期发送无线同步信号,从基站接收后调整本地时钟,同步精度通常为几纳秒。
-
GPS disciplined oscillator:利用 GPS 秒脉冲(PPS)同步各基站时钟,适合有 GPS 信号的环境。
-
IEEE 1588 PTP:通过以太网实现高精度时间同步,精度可达亚微秒级。
本项目采用 "有线主同步 + 无线辅助同步" 的混合方案:主基站之间通过有线连接实现高精度同步,从基站通过无线方式接收主基站的同步信号,同时定期进行有线校准,在保证同步精度的同时降低部署复杂度。
3.4.3 天线设计与校准
UWB 天线的性能直接影响信号传输和时间戳精度,设计挑战包括:
-
宽带阻抗匹配:在 500MHz 带宽内实现良好的阻抗匹配,减少信号反射。
-
全向辐射特性:保证在各个方向上的信号强度和相位一致性。
-
小型化设计:特别是对于无人机上的移动站,需要小尺寸、轻重量的天线。
-
天线延迟校准:天线的信号传输延迟会影响时间戳精度,需要精确校准。
校准方法包括:
-
近场校准:在无反射环境中,通过已知距离的测量校准天线延迟。
-
互校准:多个基站之间相互发送信号,通过最小二乘法计算各天线的延迟偏差。
-
温度补偿:天线延迟随温度变化,需要建立温度补偿模型。
3.4.4 干扰抑制
UWB 系统可能受到其他无线系统的干扰,特别是在 2.4GHz 和 5GHz 频段工作的 Wi-Fi、蓝牙等设备。抑制干扰的方法包括:
-
跳频技术:在多个 UWB 信道之间动态切换,避开干扰频段。
-
自适应功率控制:根据干扰水平调整发射功率,在保证通信质量的同时减少对其他系统的干扰。
-
脉冲成形:优化 UWB 脉冲的频谱特性,减少与其他系统的频谱重叠。
-
干扰检测与规避:实时监测各信道的干扰水平,自动选择干扰最小的信道。
通过综合应用这些技术,可显著提高 UWB 系统在复杂电磁环境中的可靠性。
4. 粗精组合定位的理论基础
4.1 多传感器融合的基本概念
多传感器融合技术通过综合处理来自不同传感器的信息,获得比单一传感器更精确、更可靠的结果。在定位领域,多传感器融合能够克服单一技术的局限性,充分发挥各种技术的优势。
多传感器融合的主要优势包括:
-
提高精度:不同传感器的误差特性不同,融合后可相互补偿,提高整体精度。
-
增加可靠性:当某个传感器失效或性能下降时,系统可依靠其他传感器维持工作。
-
扩展覆盖范围:结合不同作用距离的传感器,可扩展系统的有效工作范围。
-
增强鲁棒性:对环境变化和干扰的适应能力更强。
-
降低成本:通过低成本传感器与高精度传感器的结合,可在保证性能的同时降低系统成本。
在本项目中,我们融合 Nordic 远距离 BLE(粗定位)和 UWB DW1000(精定位),正是基于这些优势,以实现 "低成本、高精度、大范围" 的定位目标。
4.2 粗精组合定位的体系架构
粗精组合定位系统采用分层架构,各层负责不同的功能,协同工作实现整体定位功能。
4.2.1 硬件层
硬件层由多种传感器和通信模块组成:
-
精定位传感器:UWB DW1000 模块,提供 10cm 级高精度定位,但有效范围相对有限(通常 30-50 米)。
-
粗定位传感器:Nordic 远距离 BLE 模块(如 nRF52840),提供 1-3 米级定位精度,有效范围可达 80 米以上。
-
辅助传感器:
- IMU(惯性测量单元):提供加速度和角速度信息,用于短时间定位和运动状态估计。
- 气压计:提供高度信息,辅助三维定位。
- 磁力计:提供航向角信息,辅助姿态估计。
-
通信模块:负责传感器数据传输和基站间同步。
4.2.2 数据预处理层
数据预处理层对原始传感器数据进行清洗和预处理:
-
噪声过滤:采用卡尔曼滤波、滑动平均等方法去除传感器数据中的噪声。
-
异常值检测与剔除:识别并剔除由于干扰或故障导致的异常数据。
-
时间同步:将不同传感器的数据同步到统一的时间轴上。
-
格式转换:将原始数据转换为统一的格式,便于后续处理。
-
数据压缩:对大量数据进行压缩,减少存储和传输开销。
4.2.3 定位层
定位层实现各传感器的独立定位功能:
-
UWB 精定位模块:基于 TDoA 算法,处理 UWB 数据,输出高精度位置估计。
-
BLE 粗定位模块:基于 RSSI 和多边定位算法,处理 BLE 数据,输出大范围位置估计。
-
IMU 航迹推算模块:基于惯性导航原理,利用 IMU 数据进行短时间位置预测。
各定位模块独立工作,输出各自的位置估计结果和置信度指标。
4.2.4 融合层
融合层是粗精组合定位的核心,负责综合处理各定位模块的输出:
-
数据关联:确定不同传感器数据之间的对应关系。
-
融合算法:采用适当的融合策略(如卡尔曼滤波、粒子滤波等)组合各定位结果。
-
权重分配:根据各传感器的精度和环境适应性动态分配权重。
-
冲突解决:当不同传感器的定位结果存在较大差异时,采用合理的策略解决冲突。
-
输出校准:对融合结果进行最终校准,输出系统的最终定位结果。
4.2.5 应用层
应用层根据最终定位结果实现具体应用功能:
-
无人机导航控制:基于定位结果生成控制指令,实现无人机的自主导航。
-
轨迹规划:根据定位信息和环境地图规划最优路径。
-
数据可视化:将定位结果以直观的方式展示给用户。
-
日志记录:记录定位数据和系统状态,用于后续分析和优化。
4.3 动态权重融合算法
动态权重融合算法根据各传感器的实时性能动态调整权重,实现最优组合。其核心思想是:性能好的传感器分配更高的权重,性能差的传感器分配较低的权重,甚至暂时排除在融合过程之外。
4.3.1 传感器性能评估指标
为实现动态权重分配,需要定义量化的传感器性能评估指标:
定位误差协方差:各定位模块输出的位置估计误差协方差矩阵,表示定位精度。
一致性检验:通过比较不同传感器的定位结果,评估其一致性。定义一致性指标:![]()
![]()
信号质量指标:
- 对于 UWB:信号噪声比(SNR)、多径分量数量、视距 / 非视距判断
- 对于 BLE:RSSI 值、RSSI 方差、数据包接收率
-
历史性能:传感器在最近一段时间内的定位误差统计,反映其长期稳定性。
4.3.2 权重计算方法
综合考虑上述性能指标,权重计算方法如下:
初始权重:基于传感器的标称性能设置初始权重,如 UWB 初始权重高于 BLE。
误差协方差权重:

一致性权重:![]()
信号质量权重:

历史性能权重:
综合权重:
权重自适应调整: 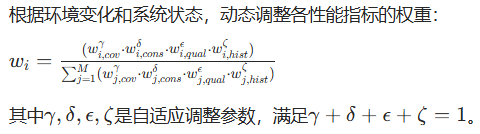
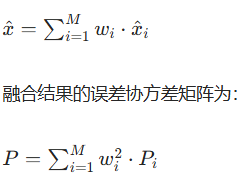
4.3.3 融合结果计算
基于计算得到的权重,融合定位结果为:
动态权重融合算法的优势在于能够自适应环境变化,在不同场景下都能保持较好的定位性能:
- 在 UWB 信号良好的区域(通常近距离),UWB 权重增加,BLE 权重降低,系统主要依赖 UWB 实现高精度定位。
- 在 UWB 信号较弱或受干扰的区域(通常远距离),BLE 权重增加,UWB 权重降低,系统主要依赖 BLE 保证定位的连续性和大范围覆盖。
- 当某个传感器出现异常时,其权重会自动降低,减少对整体定位结果的影响。
4.4 基于距离的动态切换策略
除了动态权重融合,系统还采用基于距离的动态切换策略,根据无人机与基站的距离自动调整定位模式,进一步优化性能和功耗。
4.4.1 距离阈值的确定
通过实验确定以下距离阈值:
-
近距阈值\(d_1\):通常设置为 30 米,在该范围内 UWB 信号强,定位精度高。
-
中距阈值\(d_2\):通常设置为 50 米,在\(d_1\)到\(d_2\)范围内,UWB 信号减弱,需要 BLE 辅助。
-
远距阈值\(d_3\):通常设置为 80 米,在\(d_2\)到\(d_3\)范围内,主要依赖 BLE 定位。
这些阈值可根据实际环境进行调整,例如在多遮挡环境中,阈值可适当减小。
4.4.2 定位模式划分
基于距离阈值,系统定义以下定位模式:
-
精定位模式
 :
:- UWB 工作在高频率(如 10Hz),提供高精度定位
- BLE 工作在低频率(如 1Hz),仅作为辅助和备份
- 融合算法中 UWB 权重 > 0.8,BLE 权重 < 0.2
- 定位结果主要由 UWB 决定,确保 10cm 级精度
-
混合定位模式
 :
:- UWB 工作在中等频率(如 5Hz)
- BLE 工作在中等频率(如 5Hz)
- 融合算法中 UWB 权重逐渐降低,BLE 权重逐渐增加(UWB:0.5-0.8,BLE:0.2-0.5)
- 根据信号质量动态调整权重,平衡精度和可靠性
-
粗定位模式
 :
:- UWB 工作在低频率(如 1Hz)或周期性唤醒
- BLE 工作在高频率(如 10Hz)
- 融合算法中 UWB 权重 <0.2,BLE 权重> 0.8
- 主要依赖 BLE 保证大范围覆盖,UWB 定期校准以控制累积误差
-
扩展模式
 :
:- UWB 停止工作以节省功耗
- BLE 工作在优化的长距离模式
- 结合 IMU 航迹推算,维持基本定位能力
- 精度可能降至 3-5 米,但保证系统在更远距离仍能工作
4.4.3 模式切换的平滑过渡
为避免模式切换时定位结果出现跳变,采用平滑过渡策略:
-
渐变权重:模式切换过程中,权重在 1-2 秒内平滑变化,而非突然跳变。
-
预测校正:利用前一时刻的定位结果和运动状态预测当前位置,作为模式切换时的过渡。
-
滤波参数调整:模式切换时相应调整滤波器参数,确保滤波过程的稳定性。
-
滞后效应:设置切换滞后,避免在阈值附近频繁切换。例如,从精定位模式切换到混合模式的阈值是 30 米,而从混合模式切换回精定位模式的阈值是 25 米。
这种基于距离的动态切换策略不仅优化了定位性能,还显著降低了系统功耗,特别是在远距离场景下,通过降低 UWB 的工作频率或关闭 UWB 模块,可延长无人机的续航时间。
4.5 卡尔曼滤波在融合中的应用
卡尔曼滤波(Kalman Filter)是一种高效的递归滤波器,能够从一系列包含统计噪声的测量数据中估计系统的状态。在粗精组合定位中,卡尔曼滤波是实现多传感器融合的理想工具。
4.5.1 系统状态模型
定义系统状态向量为:
![]()
其中:
状态转移模型采用匀加速运动模型:
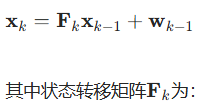
4.5.2 观测模型
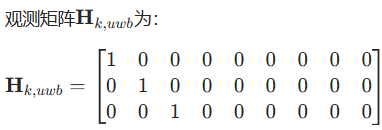
系统的观测来自UWB、BLE和IMU:
UWB观测:提供位置测量
![]()
BLE观测:提供位置测量
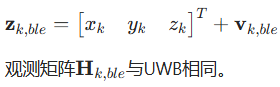
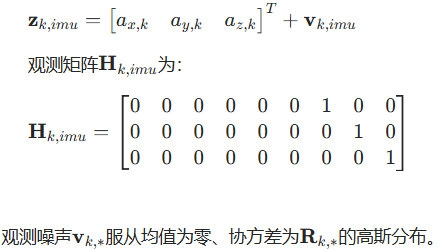
IMU观测:提供加速度测量
4.5.3 扩展卡尔曼滤波实现
由于UWB和BLE的观测模型本质上是线性的,标准卡尔曼滤波即可应用。滤波过程包括预测和更新两个步骤:
-
预测步骤:

-
更新步骤: 对于每个传感器的观测,计算卡尔曼增益并更新状态估计:

其中i表示不同的传感器(UWB、BLE、IMU)。
-
多传感器顺序更新: 按照传感器数据到达的顺序依次进行更新,每次更新都以上一次更新的结果为基础。
-
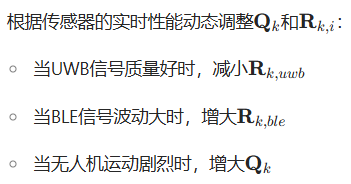
噪声协方差自适应调整:
通过卡尔曼滤波,系统能够平滑融合UWB、BLE和IMU数据,在保证高精度的同时,提高定位结果的稳定性和连续性。
5. 系统总体设计方案
5.1 系统架构概述
本系统采用分布式架构,由基站网络、移动站(安装在无人机上)和地面控制中心三部分组成,通过无线通信实现协同工作,共同完成高精度室内定位功能。
系统的整体架构如图5-1所示:
-
基站网络:
- 由多个UWB-BLE一体化基站组成,均匀分布在室内环境中
- 主基站负责时间同步和网络管理
- 从基站扩展覆盖范围,提高定位精度
- 基站之间通过有线或无线方式实现同步和数据交换
-
移动站:
- 安装在无人机上,包含UWB模块、BLE模块、IMU和微处理器
- 接收来自多个基站的UWB和BLE信号
- 运行定位算法和融合算法,计算自身位置
- 通过无线通信将位置信息发送给地面控制中心
-
地面控制中心:
- 由计算机和专用软件组成
- 监控所有基站和移动站的状态
- 显示无人机的实时位置和轨迹
- 提供用户接口,实现任务规划和系统配置
-
通信链路:
- 基站间同步链路:用于主从基站之间的时间同步
- 定位信号链路:基站与移动站之间的UWB和BLE信号传输
- 数据通信链路:移动站与地面控制中心之间的控制指令和状态数据传输
这种分布式架构的优势在于:
- 可扩展性好:通过增加基站数量扩展覆盖范围
- 可靠性高:单个基站故障不会导致整个系统失效
- 灵活性强:可根据环境特点灵活部署基站
- 成本可控:通过优化基站密度平衡性能和成本
5.2 基站与移动站的硬件配置
5.2.1 基站硬件配置
基站作为定位系统的基础设施,需要同时支持UWB和BLE功能,并具备时间同步能力。
表5-1:基站硬件配置
| 组件 | 型号/规格 | 功能描述 |
|---|---|---|
| 主控制器 | Nordic nRF52840 | 负责基站整体控制、BLE通信和协议处理 |
| UWB模块 | Decawave DW1000 | 实现UWB信号的发送和接收,提供高精度时间戳 |
| 电源管理 | TPS63070 | 高效DC-DC转换器,输入5V,输出3.3V |
| 同步接口 | RS485/以太网 | 实现基站之间的时间同步和数据通信 |
| 天线 | 定制UWB天线 + BLE天线 | 分别用于UWB和BLE信号的收发 |
| 指示灯 | RGB LED | 指示基站工作状态(电源、同步、通信) |
| 外壳 | 定制ABS外壳 | 保护内部电路,提供良好的散热 |
| 尺寸 | 100mm × 100mm × 30mm | 紧凑设计,便于安装 |
| 电源 | DC 5V/1A | 可通过POE或外接电源供电 |
基站的核心功能包括:
- 发送和接收UWB定位信号,记录精确时间戳
- 发送BLE信标信号,供移动站进行粗定位
- 与其他基站保持精确时间同步(特别是TDoA模式)
- 将UWB时间戳数据发送给主基站或直接发送给移动站
- 接收并执行来自地面控制中心的配置指令
5.2.2 移动站硬件配置
移动站安装在无人机上,需要在保证性能的同时,尽可能减小体积、重量和功耗。
表5-2:移动站硬件配置
| 组件 | 型号/规格 | 功能描述 |
|---|---|---|
| 主控制器 | STM32L476RG | 低功耗高性能MCU,负责数据处理和算法运行 |
| UWB模块 | Decawave DW1000 | 接收UWB信号,提供精确定位数据 |
| BLE模块 | Nordic nRF52840 | 接收BLE信标信号,提供粗定位数据 |
| IMU | MPU-9250 | 提供加速度、角速度和磁力数据,辅助定位 |
| 气压计 | BMP280 | 提供高度信息,辅助三维定位 |
| 通信模块 | ESP32 | 实现与地面控制中心的Wi-Fi通信 |
| 电源管理 | LTC3337 | 多通道电源管理,优化功耗 |
| 天线 | 小型UWB天线 + 小型BLE天线 | 体积小,重量轻,适合无人机安装 |
| 尺寸 | 50mm × 50mm × 15mm | 超小型设计,最小化对无人机的影响 |
| 重量 | <20g | 轻量化设计,减少无人机负载 |
| 功耗 | 平均<100mA@3.7V | 低功耗设计,延长无人机续航 |
移动站的核心功能包括:
- 接收多个基站的UWB信号,计算精确位置
- 接收多个基站的BLE信号,计算粗略位置
- 采集IMU和气压计数据,进行航迹推算
- 运行融合算法,组合多种定位数据
- 将最终定位结果发送给无人机飞控系统和地面控制中心
- 接收并执行来自地面控制中心的配置指令
5.3 网络拓扑结构
系统采用混合网络拓扑结构,结合星型和网状网络的优势,在保证可靠性的同时简化部署。
5.3.1 定位信号网络
定位信号网络采用星型拓扑:
- 中心节点:移动站作为中心节点,接收来自多个基站的定位信号
- 外围节点:多个基站作为外围节点,发送定位信号或接收移动站的请求信号
- 信号流向:主要是基站到移动站的下行链路,用于发送定位信号
- 通信方式:UWB和BLE信号采用广播或定向通信方式
星型拓扑的优势在于:
- 移动站设计简单,只需接收信号无需复杂的路由决策
- 可扩展性好,增加基站数量不影响现有网络结构
- 适合移动场景,移动站位置变化不影响网络拓扑
5.3.2 同步与数据网络
同步与数据网络采用网状拓扑:
- 主基站:一个或多个主基站负责网络管理和时间同步
- 从基站:多个从基站通过无线或有线方式连接到主基站
- 数据路由:基站之间可相互通信,形成多路径数据传输
- 同步机制:主基站向从基站发送同步信号,从基站之间也可相互同步
网状拓扑的优势在于:
- 可靠性高,一个链路故障可自动切换到其他链路
- 覆盖范围广,基站可相互中继信号
- 负载均衡,数据可通过多条路径传输
5.3.3 混合拓扑的协同工作
两种拓扑结构协同工作,形成完整的定位网络:
-
时间同步流程:
- 主基站生成高精度同步信号
- 同步信号通过网状网络传输到所有从基站
- 所有基站保持时间同步,误差<1ns
-
定位信号流程:
- 基站按照同步时间发送UWB和BLE定位信号
- 移动站接收多个基站的定位信号
- 移动站根据信号到达时间差计算自身位置
-
数据传输流程:
- 移动站将定位结果通过Wi-Fi发送到地面控制中心
- 基站状态数据通过网状网络汇总到主基站,再发送到地面控制中心
- 地面控制中心的配置指令通过主基站分发到所有基站和移动站
这种混合拓扑结构兼顾了定位精度、网络可靠性和部署灵活性,特别适合室内无人机定位应用。
5.4 通信协议栈设计
系统设计了分层的通信协议栈,确保不同类型的数据高效、可靠传输。
5.4.1 物理层
物理层负责信号的发送和接收,针对不同的传输需求采用不同的物理层配置:
-
UWB物理层:
- 基于DW1000芯片,工作在6.5GHz频段
- 带宽500MHz,数据速率6.8Mbps
- 采用脉冲无线电调制方式
- 发射功率可调节,默认+3dBm
-
BLE物理层:
- 基于nRF52840芯片,工作在2.4GHz ISM频段
- 采用GFSK调制方式
- 支持1Mbps(标准模式)和125kbps(长距离模式)
- 发射功率可调节,默认0dBm,最大+8dBm
-
数据通信物理层:
- 基于ESP32的Wi-Fi模块
- 支持802.11b/g/n协议
- 工作在2.4GHz频段
- 数据速率最高150Mbps
5.4.2 数据链路层
数据链路层负责数据的帧封装、差错控制和媒体访问控制:
-
UWB数据链路层:
- 帧结构:前导码 + 同步字 + 帧头 + 数据 + CRC
- 前导码长度:64或1024个符号,用于同步
- 同步字:32位,用于帧检测
- 帧头:包含帧类型、长度、地址等信息
- CRC:16位,用于差错检测
-
BLE数据链路层:
- 采用BLE 5.0标准的ADV_IND广播帧
- 帧结构:前导码 + 接入地址 + PDU + CRC
- PDU包含类型、长度和数据字段
- 支持加密传输,确保数据安全
-
数据通信数据链路层:
- 基于IEEE 802.11 MAC协议
- 支持CSMA/CA媒体访问控制
- 采用ACK机制确保数据可靠传输
- 支持帧聚合和块确认,提高传输效率
5.4.3 网络层
网络层负责路由选择和数据转发:
-
基站网络层:
- 采用简化的AODV(Ad-hoc On-Demand Distance Vector)路由协议
- 支持动态路由,自动适应网络拓扑变化
- 主基站作为路由中心,维护路由表
- 支持多路径路由,提高可靠性
-
移动站网络层:
- 采用星形路由,直接与地面控制中心通信
- 支持快速重连,适应移动场景
- 可通过多个基站中继通信,扩展覆盖范围
5.4.4 应用层协议
应用层定义了系统特有的数据格式和交互流程:
-
UWB定位协议:
- 定位请求帧:移动站发送,请求基站回应
- 定位回应帧:基站发送,包含精确时间戳
- 同步帧:主基站发送,用于时间同步
- 校准帧:用于基站和移动站的参数校准
-
BLE定位协议:
- 信标帧:基站周期性发送,包含基站ID和位置信息
- 扫描响应帧:移动站发送,请求基站增强信号
- 配置帧:用于BLE参数配置
-
控制与状态协议:
- 状态报告帧:基站和移动站定期发送状态信息
- 控制指令帧:地面控制中心发送控制命令
- 配置帧:用于系统参数配置
- 日志帧:用于传输系统日志和调试信息
应用层协议设计充分考虑了实时性和可靠性需求,定位相关帧优先级高于状态和日志帧,确保定位数据的及时传输。
5.5 系统工作流程
系统的整体工作流程包括初始化、定位和数据传输三个主要阶段:
5.5.1 系统初始化阶段
-
基站启动与自检:
- 基站上电后进行硬件自检,包括UWB、BLE和通信模块
- 自检通过后,主基站开始发送同步信号
- 从基站接收同步信号,调整本地时钟,完成与主基站的同步
- 基站之间交换ID和位置信息,构建基站网络
-
移动站启动与配置:
- 移动站上电后进行硬件自检
- 扫描并连接到BLE信标,获取附近基站信息
- 与主基站建立UWB通信,完成初始化配置
- 进行传感器校准,包括IMU零漂校准和磁力计校准
-
系统校准:
- 基站之间进行相互测距,验证位置信息和同步精度
- 移动站在已知位置进行静态校准,获取初始定位偏差
- 系统自动调整UWB和BLE的参数,优化性能
初始化阶段通常需要1-2分钟,完成后系统进入正常工作状态。
5.5.2 定位工作阶段
系统进入正常工作状态后,按照以下流程进行定位:
-
UWB精定位流程:
- 移动站周期性发送UWB定位请求(周期根据距离动态调整)
- 各基站接收请求信号,记录精确接收时间戳
- 基站将时间戳和自身ID通过数据网络发送给移动站或主基站
- 移动站或主基站根据多个基站的时间戳计算时间差
- 基于TDoA算法解算移动站的精确位置
-
BLE粗定位流程:
- 基站周期性发送BLE信标信号,包含基站ID和位置信息
- 移动站接收多个基站的BLE信号,记录RSSI值
- 移动站根据RSSI值估计到各基站的距离
- 基于多边定位算法计算移动站的粗略位置
-
多传感器融合流程:
- 移动站采集IMU数据,进行航迹推算
- 运行卡尔曼滤波算法,融合UWB、BLE和IMU数据
- 根据距离和信号质量动态调整各传感器权重
- 输出最终的融合定位结果
-
动态模式调整:
- 系统实时监测移动站与基站的距离
- 根据距离自动切换精定位、混合定位或粗定位模式
- 调整UWB和BLE的工作频率,优化性能和功耗
定位工作阶段是系统的主要运行阶段,持续进行直到系统关闭或进入休眠状态。
5.5.3 数据传输与控制阶段
-
数据上传流程:
- 移动站将融合后的定位结果发送给无人机飞控系统
- 移动站定期将定位数据、传感器数据发送给地面控制中心
- 基站定期将状态信息、同步质量数据发送给地面控制中心
-
控制指令下传流程:
- 地面控制中心向移动站发送任务指令和控制参数
- 地面控制中心向基站发送配置指令和同步参数
- 移动站和基站执行指令并返回确认信息
-
异常处理流程:
- 系统实时监测各模块状态,检测异常情况
- 发生异常时,自动执行预设的恢复策略
- 严重异常时,向地面控制中心发送报警信息
- 地面控制中心根据报警信息采取相应措施
数据传
UWB与BLE融合的无人机定位系统设计 TRAE
## 系统设计相关图表说明
### 图1:系统整体架构图
+-------------------------+ +-------------------------+
| 地面控制中心 | | |
| +-------------------+ | | 室内环境 |
| | 监控与显示软件 | | | |
| +-------------------+ | | +-------------------+ |
| | 任务规划模块 |<--------->| 主基站 | |
| +-------------------+ | Wi-Fi | +-------------------+ |
| | 数据分析模块 | | | | UWB模块 | |
| +-------------------+ | | | BLE模块 | |
+-------------------------+ | | 同步模块 | |
| | 通信模块 | |
+-------------------------+
| ^
| |
v |
+-------------------------+
| 从基站1 | |
| +-------------------+ |
| | UWB模块 | |
| | BLE模块 | |
| | 同步模块 | |
+-------------------------+
| ^
| |
v |
+-------------------------+ +-------------------------+
| | | |
| 无人机 | | 从基站2 | |
| +-------------------+ | | +-------------------+ |
| | 飞控系统 | | | | UWB模块 | |
| +-------------------+ | | | BLE模块 | |
| | 移动站 |<----------->| | 同步模块 | |
| | +-------------+ | | UWB/BLE | +-------------------+ |
| | | UWB模块 | | | +-------------------------+
| | +-------------+ | | ...
| | | BLE模块 | | |
| | +-------------+ | | +-------------------------+
| | | IMU传感器 | | | | 从基站n | |
| | +-------------+ | | | +-------------------+ |
| | | 融合算法 | | | | | UWB模块 | |
| | +-------------+ | | | | BLE模块 | |
| +-------------------+ | | | 同步模块 | |
+-------------------------+ +-------------------------+
### 图2:动态权重融合算法流程图
开始
|
v
初始化权重参数
|
v
读取各传感器定位数据
|
v
计算各传感器误差协方差
|
v
进行一致性检验
|
v
评估信号质量指标
|
v
分析历史性能数据
|
v
计算综合权重
|
v
融合定位结果
|
v
更新误差协方差矩阵
|
v
判断是否需要模式切换
| 是
|-----> 调整传感器工作模式
| |
| v
| 更新权重参数
| |
| v
| 返回
|
否
|
v
输出融合定位结果
|
v
等待下一采样周期
|
v
返回
### 图3:系统工作状态转换图
+----------------+ 距离 > d1 +----------------+
| 精定位模式 |---------------->| 混合定位模式 |
+----------------+ +----------------+
^ |
| | 距离 > d2
| v
| +----------------+
| | 粗定位模式 |
| +----------------+
| |
| | 距离 > d3
| v
| +----------------+
| | 扩展模式 |
| +----------------+
| |
| |
+------------------------------------+
距离 < 阈值 - 滞后量
### 图4:卡尔曼滤波融合流程图
开始
|
v
初始化状态向量和协方差矩阵
|
v
预测步骤:
计算状态预测 x_k|k-1 = F_k * x_k-1|k-1
计算协方差预测 P_k|k-1 = F_k * P_k-1|k-1 * F_k^T + Q_k
|
v
是否有UWB数据? --是--> UWB更新:
| 计算卡尔曼增益 K_uwb
| 更新状态 x_k|k,uwb = x_k|k-1 + K_uwb*(z_uwb - H_uwb*x_k|k-1)
| 更新协方差 P_k|k,uwb = (I - K_uwb*H_uwb)*P_k|k-1
| |
| v
否 是有BLE数据? --是--> BLE更新:
| 计算卡尔曼增益 K_ble
| 更新状态 x_k|k,ble = x_k|k,uwb + K_ble*(z_ble - H_ble*x_k|k,uwb)
| 更新协方差 P_k|k,ble = (I - K_ble*H_ble)*P_k|k,uwb
| |
| v
| 是有IMU数据? --是--> IMU更新:
| 计算卡尔曼增益 K_imu
| 更新状态 x_k|k,imu = x_k|k,ble + K_imu*(z_imu - H_imu*x_k|k,ble)
| 更新协方差 P_k|k,imu = (I - K_imu*H_imu)*P_k|k,ble
| |
| v
+----------------+----------------+----------------+--------------+
| | |
v v v
输出最终状态 保存当前状态 调整噪声协方差
|
v
结束
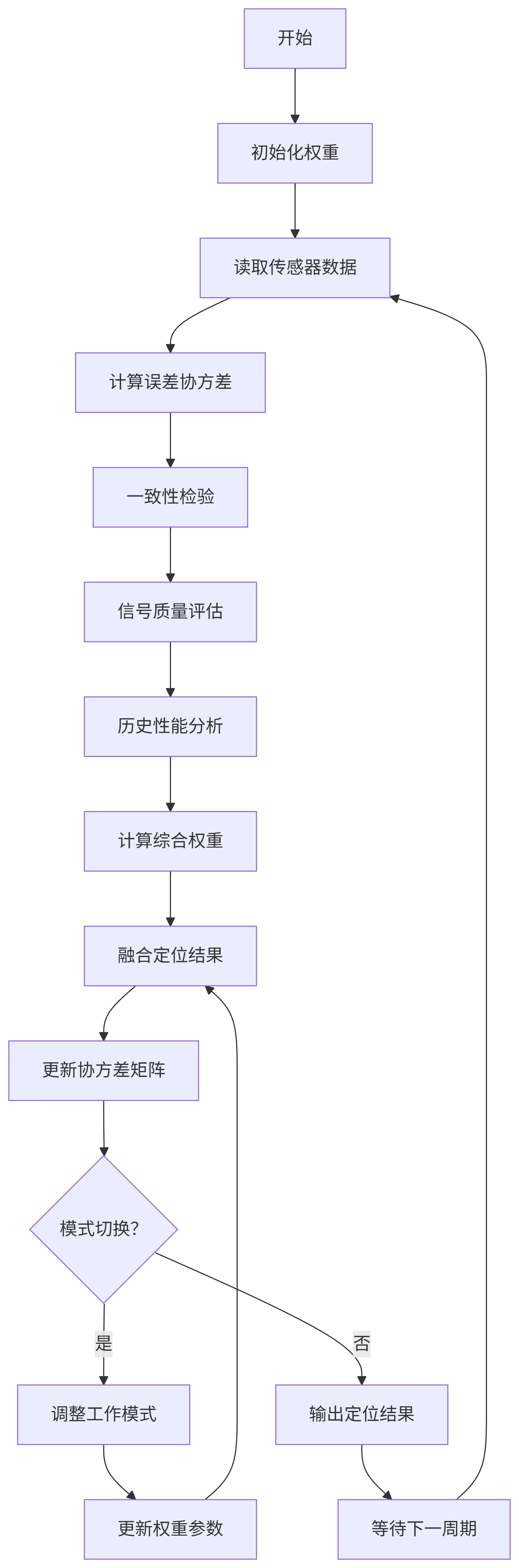
核心创新点:
-
多维度权重计算:同时考虑实时误差、信号质量、历史可靠性
-
一致性检验:通过马氏距离检测传感器异常数据
-
自适应模式切换:根据环境动态调整定位策略(如NLOS场景降权UWB)
状态转换机制解析
四模式智能切换策略:
-
精定位模式(d < d1)
-
激活所有UWB基站+IMU融合
-
定位精度:5-10cm
-
-
混合模式(d1 < d < d2)
-
UWB+BLE联合定位
-
精度降为15-30cm但功耗降低40%
-
-
粗定位模式(d2 < d < d3)
-
仅BLE信标定位
-
精度1-3米,维持基础追踪能力
-
-
扩展模式(d > d3)
-
惯性导航主导(IMU dead reckoning)
-
需定期回传校正
-
防抖设计:距离阈值设置滞后量(Hysteresis),避免边界频繁切换
卡尔曼滤波融合流程解析
级联式多传感器融合:
python
# 伪代码示例
def kalman_fusion():
# 预测阶段
x_pred = F * x_prev
P_pred = F * P_prev * F.T + Q
# 级联更新(按数据可靠性排序)
if uwb_data_valid:
K_uwb = P_pred * H_uwb.T * inv(H_uwb*P_pred*H_uwb.T + R_uwb)
x_update = x_pred + K_uwb*(z_uwb - H_uwb*x_pred)
P_update = (I - K_uwb*H_uwb)*P_pred
if ble_data_valid:
K_ble = P_update * H_ble.T * inv(H_ble*P_update*H_ble.T + R_ble)
x_update = x_update + K_ble*(z_ble - H_ble*x_update)
P_update = (I - K_ble*H_ble)*P_update
if imu_data_valid:
K_imu = P_update * H_imu.T * inv(H_imu*P_update*H_imu.T + R_imu)
x_update = x_update + K_imu*(z_imu - H_imu*x_update)
P_update = (I - K_imu*H_imu)*P_update
return x_update, P_update
关键技术特征:
-
更新顺序优化:按UWB→BLE→IMU可靠性降序处理
-
自适应噪声协方差:
-
R_uwb:根据信号强度动态调整(NLOS场景自动增大)
-
Q_imu:随运动加速度自适应变化
-
-
残差检测机制:当|z_meas - H*x_pred|>3σ时触发异常丢弃
系统设计建议
-
抗多径优化:
-
在基站部署中加入MIMO天线阵列
-
采用CHAN算法抑制NLOS误差
-
-
同步增强:
-
主基站使用GPS驯服时钟(TCXO)
-
从基站采用双向测距(TWR)同步
-
-
能耗优化:
-
BLE基站采用占空比<1%的广告模式
-
动态调整UWB脉冲重复频率(PRF)
-
该方案通过多层级的自适应机制,在定位精度、系统能耗、环境鲁棒性之间实现了工程级平衡,特别适合仓储物流、消防救援等复杂室内场景的无人机应用。
6. 基站硬件设计与实现
6.1 基站总体设计
基站作为定位系统的基础设施,需要同时实现UWB精确定位、BLE粗定位、时间同步和数据通信等功能。基站的设计目标是:高精度、远距离、低功耗、低成本和易于部署。
6.1.1 基站功能需求
基站需要满足以下功能需求:
-
UWB定位功能:
- 发送和接收UWB信号
- 提供纳秒级精度的时间戳
- 支持TDoA定位算法
- 通信距离不小于80米
-
BLE定位功能:
- 发送BLE信标信号
- 支持长距离模式
- 通信距离不小于80米
- 可配置发射功率和广播间隔
-
时间同步功能:
- 与其他基站保持精确时间同步
- 同步误差小于1ns
- 支持有线和无线同步方式
- 具备时钟漂移补偿能力
-
数据通信功能:
- 与其他基站进行数据交换
- 与地面控制中心通信
- 支持配置参数的远程更新
- 传输定位相关数据
-
电源管理功能:
- 支持多种供电方式
- 低功耗设计,降低运行成本
- 具备电源状态监测能力
- 过流、过压保护
-
状态指示功能:
- 电源状态指示
- 同步状态指示
- 通信状态指示
- 故障报警指示
6.1.2 基站硬件架构
基站采用模块化硬件架构,主要包括以下模块:
- 主控制模块:负责基站的整体控制和协调
- UWB模块:实现UWB信号的发送和接收
- BLE模块:实现BLE信标的发送
- 同步模块:实现与其他基站的时间同步
- 通信模块:实现数据传输功能
- 电源管理模块:提供稳定的电源供应
- 指示模块:提供状态指示功能
这种模块化设计的优势在于:
- 便于功能扩展和升级
- 简化故障排查和维修
- 有利于批量生产和成本控制
- 可根据应用需求灵活配置
6.1.3 基站外形与安装设计
基站的外形设计考虑以下因素:
- 尺寸小巧,便于安装
- 良好的散热性能
- 天线布局合理,减少信号干扰
- 防护等级满足室内环境要求
基站的安装方式设计为:
- 支持壁挂安装
- 支持吊顶安装
- 支持桌面放置
- 安装配件齐全,安装过程简单
基站的尺寸设计为100mm × 100mm × 30mm,重量小于100g,可轻松安装在各种室内环境中。
6.2 核心芯片选型
基站的核心芯片选型直接影响系统性能、成本和功耗,需要综合考虑各方面因素。
6.2.1 主控制器选型
主控制器负责基站的整体控制,需要具备足够的处理能力、丰富的外设接口和低功耗特性。
表6-1:主控制器选型对比
| 芯片型号 | 内核 | 主频 | 内存 | 外设接口 | 功耗 | 价格 | 优势 |
|---|---|---|---|---|---|---|---|
| STM32F405 | Cortex-M4 | 168MHz | 1MB Flash, 192KB RAM | 丰富 | 中 | 中 | 性能均衡 |
| Nordic nRF52840 | Cortex-M4F | 64MHz | 1MB Flash, 256KB RAM | 丰富,集成BLE | 低 | 中高 | 集成BLE,低功耗 |
| ESP32 | Xtensa dual-core | 240MHz | 4MB Flash, 520KB RAM | 丰富,集成Wi-Fi和BLE | 中高 | 低 | 集成无线功能 |
| PIC32MX795 | MIPS32 | 80MHz | 512KB Flash, 128KB RAM | 一般 | 中 | 中 | 可靠性高 |
综合考虑,选择Nordic nRF52840作为主控制器,主要原因如下:
- 内置高性能BLE模块,可直接实现BLE定位功能,无需额外芯片
- 低功耗特性,适合长时间运行
- 丰富的外设接口,包括SPI、I2C、UART等,可满足与其他模块的通信需求
- 足够的处理能力,可运行基站控制逻辑和简单的数据处理算法
- 良好的开发工具和社区支持,缩短开发周期
6.2.2 UWB芯片选型
UWB芯片是实现精确定位的核心,需要具备高精度时间戳、良好的射频性能和较低的功耗。
表6-2:UWB芯片选型对比
| 芯片型号 | 时间戳精度 | 工作频率 | 数据速率 | 功耗 | 定位精度 | 价格 | 优势 |
|---|---|---|---|---|---|---|---|
| Decawave DW1000 | 15.6ps | 3.5-6.5GHz | 110kbps-6.8Mbps | 中 | <10cm | 中 | 成熟稳定,应用广泛 |
| Qorvo DWM3000 | 10ps | 3.5-6.5GHz | 6.8Mbps | 中低 | <10cm | 高 | 集成度高,性能优异 |
| NXP SR150 | 31.25ps | 6-8GHz | 6.8Mbps | 中 | <30cm | 中低 | 成本低,适合大规模部署 |
| Nordic nRF21540 | 未公开 | 3.1-6.0GHz | 未公开 | 低 | 未公开 | 未公开 | 与nRF52840兼容性好 |
选择Decawave DW1000作为UWB芯片,主要原因如下:
- 15.6ps的时间戳精度,可满足10cm级定位需求
- 成熟稳定,经过市场验证,应用案例丰富
- 完善的开发资料和SDK支持,降低开发难度
- 适中的成本,平衡性能和经济性
- 与nRF52840主控制器兼容性好,可通过SPI接口轻松连接
6.2.3 电源管理芯片选型
电源管理芯片负责为基站各模块提供稳定的电源,需要具备高效率、低噪声和多种保护功能。
表6-3:电源管理芯片选型对比
| 芯片型号 | 输入电压 | 输出电压 | 输出电流 | 效率 | 保护功能 | 价格 |
|---|---|---|---|---|---|---|
| TPS63070 | 2.7-11V | 0.6-5.5V | 3A | 95% | 过流、短路 | 中 |
| LM1117-3.3 | 4.75-12V | 3.3V | 1A | 80% | 过温 | 低 |
| MP2307 | 4.5-28V | 0.8-20V | 3A | 92% | 过流、过温 | 低 |
| LTC3337 | 2.7-5.5V | 0.6-5V | 3A | 94% | 过流、短路、过温 | 高 |
选择TPS63070作为主要电源管理芯片,原因如下:
- 宽输入电压范围(2.7-11V),可适应多种供电方式
- 高效率(最高95%),减少功耗和发热
- 足够的输出电流(3A),可满足所有模块的供电需求
- 完善的保护功能,提高系统可靠性
- 可调节输出电压,灵活性高
6.2.4 同步与通信芯片选型
同步与通信芯片负责基站之间的时间同步和数据传输。
表6-4:同步与通信芯片选型
| 功能 | 芯片型号 | 主要参数 | 优势 |
|---|---|---|---|
| 有线同步 | SN75176 | RS485 transceiver, 250kbps | 简单可靠,低成本 |
| 以太网通信 | W5500 | 10/100Mbps Ethernet, SPI接口 | 高速,适合大数据传输 |
| 无线同步辅助 | nRF24L01 | 2.4GHz, 2Mbps, 低功耗 | 低成本,易于集成 |
综合考虑,采用RS485作为主要同步方式,配合以太网进行数据传输,理由如下:
- RS485同步方式简单可靠,可实现微秒级同步精度
- 以太网通信速率高,适合传输大量定位数据
- 两种方式都支持长距离传输,适合大型室内环境
- 成本适中,易于实现
6.3 硬件电路设计
基站硬件电路设计包括多个功能模块,需要考虑信号完整性、电源稳定性和电磁兼容性等因素。
6.3.1 主控制电路
主控制电路以nRF52840为核心,包括以下部分:
-
电源电路:
- 3.3V电源输入,通过LDO提供稳定电压
- 电源滤波电路,包括10uF电解电容和0.1uF陶瓷电容
- 电源指示灯,指示供电状态
-
时钟电路:
- 32MHz晶体振荡器,为主芯片提供系统时钟
- 32.768kHz晶体振荡器,为低功耗定时器和RTC提供时钟
- 负载电容匹配,确保时钟稳定工作
-
复位电路:
- 手动复位按钮
- 上电复位电路,确保芯片正确启动
-
调试接口:
- SWD调试接口,包括SWCLK、SWDIO和RESET引脚
- 预留UART接口,用于调试信息输出
-
用户接口:
- 状态指示灯(RGB LED)
- 配置按钮,用于快速配置
nRF52840的外围电路设计遵循数据手册推荐的参考设计,确保稳定可靠工作。特别注意射频部分的布局,减少干扰。
6.3.2 UWB模块电路
UWB模块电路以DW1000为核心,包括以下部分:
-
电源电路:
- 3.3V电源输入,独立LDO供电
- 多级滤波电路,减少电源噪声对射频性能的影响
- 电源使能控制,可关闭UWB模块以节省功耗
-
时钟电路:
- 38.4MHz温补晶振(TCXO),提供高精度时钟
- 晶振负载电容匹配,确保频率稳定性
-
射频电路:
- 天线匹配网络,包括电感和电容
- 射频开关,可切换发送和接收模式
- 低通滤波器,减少谐波辐射
-
接口电路:
- SPI接口,与主控制器通信
- 中断信号线,用于时间戳捕获和事件通知
- 复位和唤醒控制信号
-
天线设计:
- 平面倒F天线(PIFA)设计,小型化
- 工作频段3.5-6.5GHz
- 阻抗匹配到50Ω
UWB电路设计特别关注信号完整性和阻抗匹配,射频走线采用50Ω微带线,避免直角转弯,减少信号反射。DW1000与天线之间的距离尽可能短,减少信号损耗。
6.3.3 BLE电路
由于nRF52840内置BLE功能,BLE电路相对简单:
-
射频电路:
- 天线匹配网络,包括电感和电容
- 可选的射频功率放大器,扩展通信距离
- 2.4GHz带通滤波器,减少带外干扰
-
天线设计:
- 小型化PCB天线
- 工作频段2.4-2.5GHz
- 全向辐射特性
为了提高BLE的通信距离,电路设计支持外接功率放大器(如nRF21540),可将发射功率提高到+20dBm,显著扩展通信范围。
6.3.4 同步与通信电路
-
RS485同步电路:
- SN75176 RS485收发器
- 终端匹配电阻(120Ω)
- 保护电路,包括TVS二极管和自恢复保险丝
- 差分信号接口,支持最长1000米传输
-
以太网通信电路:
- W5500以太网控制器
- 网络变压器
- RJ45接口
- SPI接口与主控制器连接
-
状态指示:
- 以太网链路指示灯
- 数据传输指示灯
- RS485通信指示灯
同步与通信电路设计注重可靠性和抗干扰能力,采用差分信号传输,增加保护电路,确保在工业环境中稳定工作。
6.3.5 电源管理电路
电源管理电路为整个基站提供稳定可靠的电源:
-
输入保护电路:
- 过压保护,防止输入电压过高损坏电路
- 反接保护,防止电源极性接反
- 过流保护,限制最大输入电流
-
DC-DC转换电路:
- TPS63070主转换器,将5V输入转换为3.3V
- 输出电流能力3A,满足所有模块需求
- 同步整流,提高转换效率
-
辅助电源:
- 为不同模块提供独立电源
- 包括3.3V、2.8V和1.8V输出
- 各电源域之间增加隔离,减少干扰
-
电源监测电路:
- 输入电压监测
- 输出电压监测
- 电源状态反馈到主控制器
电源管理电路设计注重效率和稳定性,特别是为射频模块提供低噪声电源,减少对通信性能的影响。
6.4 PCB设计要点
基站的PCB设计对性能有重要影响,特别是射频部分的布局设计直接影响定位精度和通信距离。
6.4.1 叠层设计
采用4层PCB设计,叠层结构如下:
-
顶层(Top Layer):
- 主要放置数字电路和控制电路
- 部分射频电路,包括天线
-
第二层(Ground Layer):
- 完整的接地平面
- 为顶层电路提供屏蔽和散热
-
第三层(Power Layer):
- 电源平面,包括3.3V主电源
- 可分割为多个电源区域,减少干扰
-
底层(Bottom Layer):
- 主要放置射频电路和高速信号
- 部分数字电路
这种叠层设计的优势在于:
- 良好的信号完整性,减少电磁干扰
- 有效的散热路径,降低芯片温度
- 简化布线,特别是高速信号线
6.4.2 布局设计
布局设计遵循以下原则:
-
功能分区:
- 数字区:主控制器和数字电路
- 射频区:UWB和BLE射频电路
- 电源区:电源管理电路
- 接口区:同步和通信接口
-
射频电路布局:
- UWB和BLE射频电路远离数字电路,减少干扰
- 射频元件(特别是天线、匹配网络)紧凑布局
- 射频地与数字地适当隔离,通过单点连接
-
高速信号布局:
- SPI信号线短而直,减少信号完整性问题
- 差分信号线(如以太网、RS485)长度匹配,保持对称
-
散热考虑:
- 大功率器件(如电源管理芯片)下方增加散热过孔
- 主控制器和UWB芯片周围增加接地过孔,增强散热
6.4.3 布线设计
布线设计遵循以下原则:
-
电源布线:
- 主电源采用宽线(>0.5mm),减少压降
- 关键电源线上增加滤波电容,靠近芯片电源引脚
- 模拟电源和数字电源分开布线
-
接地布线:
- 大面积接地平面,减少接地阻抗
- 数字地和模拟地通过0欧电阻或磁珠单点连接
- 射频电路周围增加接地保护环
-
信号布线:
- 高速信号线(如SPI)阻抗控制在50Ω
- 避免信号线跨分割平面
- 敏感信号线远离干扰源
-
射频布线:
- UWB和BLE射频走线阻抗控制在50Ω
- 射频走线短而直,避免直角转弯
- 射频走线与其他信号线保持至少3倍线宽的距离
6.4.4 电磁兼容性(EMC)设计
为确保基站在复杂电磁环境中稳定工作,PCB设计特别注重EMC性能:
-
电磁干扰(EMI)抑制:
- 时钟信号和高速信号增加屏蔽
- 电源入口增加EMI滤波器
- 合理布局减少环路面积
-
电磁抗干扰(EMS)增强:
- 敏感电路增加屏蔽
- 关键信号线增加滤波
- 接地平面完整,减少干扰耦合
-
静电放电(ESD)保护:
- 所有外部接口增加ESD保护器件
- 按钮和指示灯增加ESD保护
- 电源接口增加过压和过流保护
通过精心的PCB设计,基站能够在工业环境中稳定工作,减少电磁干扰对定位精度的影响。
6.5 基站固件设计
基站固件是实现基站功能的核心,负责UWB和BLE信号处理、时间同步、数据通信和系统管理。
6.5.1 固件架构
基站固件采用分层架构,包括:
-
硬件抽象层(HAL):
- 封装硬件驱动,包括UWB、BLE、GPIO等
- 提供统一的硬件操作接口
- 隔离硬件差异,便于移植
-
协议层:
- 实现UWB和BLE定位协议
- 实现同步协议
- 实现数据通信协议
-
应用层:
- 实现定位逻辑
- 实现同步管理
- 实现系统状态管理
- 实现配置管理
-
操作系统:
- 采用FreeRTOS实时操作系统
- 多任务调度,确保实时性
- 任务间通信和同步机制
这种分层架构的优势在于:
- 模块化设计,便于维护和扩展
- 硬件与软件分离,便于硬件升级
- 实时性保证,满足定位时间要求
6.5.2 主要任务设计
基站固件包含以下主要任务:
-
主控制任务:
- 优先级:高
- 功能:系统初始化、任务管理、状态监控
- 周期:100ms
-
UWB处理任务:
- 优先级:最高
- 功能:UWB信号收发、时间戳捕获、数据处理
- 触发方式:中断驱动
-
BLE处理任务:
- 优先级:中
- 功能:BLE信标发送、参数管理
- 周期:可配置(默认100ms)
-
同步任务:
- 优先级:高
- 功能:与其他基站同步、时钟校准
- 周期:10ms
-
通信任务:
- 优先级:中
- 功能:数据收发、命令处理
- 触发方式:事件驱动
-
状态监测任务:
- 优先级:低
- 功能:系统状态监测、故障诊断
- 周期:1000ms
任务间通过消息队列和信号量进行通信和同步,确保数据一致性和实时性。
6.5.3 UWB固件实现
UWB固件是基站功能的核心,实现高精度时间戳捕获和UWB信号处理:
-
UWB初始化:
- 配置DW1000工作参数,包括频率、数据速率、发射功率
- 校准UWB模块,包括天线延迟校准
- 配置中断和时间戳捕获
-
UWB接收处理:
- 接收移动站发送的UWB请求信号
- 捕获精确



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









