






一、敏捷开发流程实施
1.1 Scrum流程框架

1.2 团队职责分工
| 角色 | 职责 | 交付物 | 工具链 |
|---|---|---|---|
| 产品负责人 | 需求定义/优先级排序 | 产品Backlog | Jira |
| Scrum Master | 流程协调/障碍清除 | 燃尽图 | Confluence |
| 硬件工程师 | 电路设计/PCB布局 | 原理图/Gerber | Altium Designer |
| 嵌入式工程师 | 驱动开发/系统集成 | 固件镜像 | Keil MDK |
| 算法工程师 | 导航算法实现 | 算法模型/验证报告 | MATLAB/Python |
| 测试工程师 | 测试用例/验证 | 测试报告 | RobotFramework |
1.3 持续集成流程
1. 代码提交 (Git) ├─ 触发代码静态分析 (Cppcheck) ├─ 单元测试 (Ceedling) 2. 硬件在环测试 ├─ IMU模拟器 (Simulink) ├─ GNSS信号模拟 (LabSat) 3. 系统集成构建 ├─ 固件编译 (GCC) ├─ OTA包生成 4. 自动化测试 ├─ 轨迹精度测试 ├─ 故障注入测试 5. 发布候选版本
二、系统架构设计
2.1 硬件组合框图
(略)
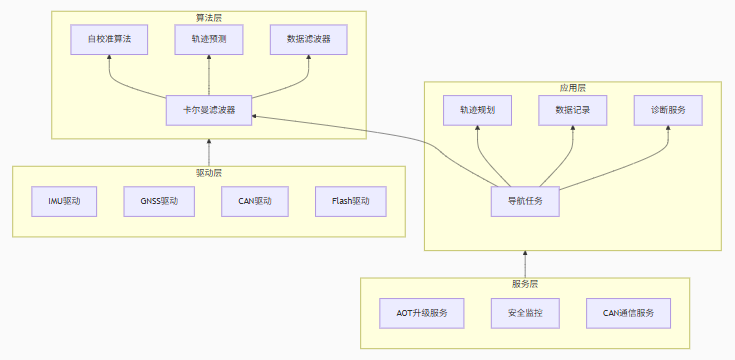
2.2 软件架构框图
三、UML建模设计
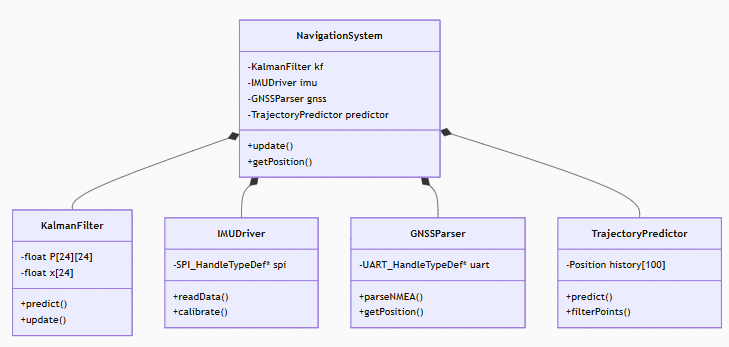
3.1 类图设计
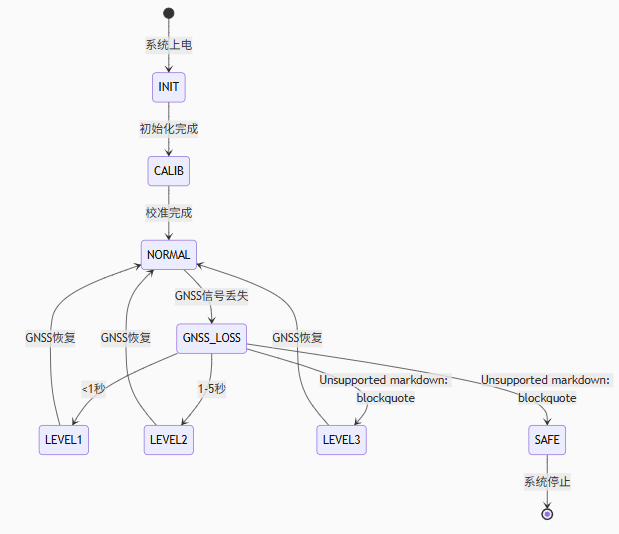
3.2 状态图设计
四、核心软件算法实现
4.1 多级安全轨迹回退机制
c语言
// 安全回退等级定义
typedef enum {
SAFETY_LEVEL0 = 0, // 正常模式
SAFETY_LEVEL1, // IMU积分
SAFETY_LEVEL2, // 运动学预测
SAFETY_LEVEL3, // 历史轨迹预测
SAFETY_LEVEL4 // 悬停模式
} SafetyLevel;
// 轨迹回退实现
Position GetSafePosition(NavSystem* sys) {
static uint32_t gnss_loss_time = 0;
SafetyLevel level = SAFETY_LEVEL0;
// 检测GNSS状态
if(sys->gnss.fix_quality < GPS_FIX_3D) {
gnss_loss_time++;
level = DetermineSafetyLevel(gnss_loss_time);
} else {
gnss_loss_time = 0;
}
// 多级回退机制
switch(level) {
case SAFETY_LEVEL0:
return sys->gnss.position;
case SAFETY_LEVEL1:
return IMU_IntegratePosition(sys);
case SAFETY_LEVEL2:
return KinematicPredict(sys);
case SAFETY_LEVEL3:
return HistoryBasedPredict(sys);
case SAFETY_LEVEL4:
default:
return (Position){0, 0, sys->last_position.d}; // 悬停高度
}
}
// 安全等级判定
SafetyLevel DetermineSafetyLevel(uint32_t loss_time) {
if(loss_time < 50) return SAFETY_LEVEL1; // <0.5秒
if(loss_time < 200) return SAFETY_LEVEL2; // 0.5-2秒
if(loss_time < 1000) return SAFETY_LEVEL3; // 2-10秒
return SAFETY_LEVEL4; // >10秒
}
4.2 改进自适应卡尔曼滤波(定点优化)
c语言
// Q16定点数卡尔曼滤波
void KalmanPredict_Q16(KalmanFilter_Q16* kf, IMUData_Q16* imu, uint32_t dt_ms) {
q16_t dt = FLOAT_TO_Q16(dt_ms / 1000.0f);
// 状态预测: x = F * x
kf->x[STATE_VN] += kf->x[STATE_ACC_BIAS_X] * dt / 2;
kf->x[STATE_VE] += kf->x[STATE_ACC_BIAS_Y] * dt / 2;
// ... 其他状态预测
// 协方差预测: P = F * P * F^T + Q
Matrix_Multiply_Q16(F, kf->P, temp1, 24, 24, 24);
Matrix_TransposeMultiply_Q16(temp1, F, temp2, 24, 24, 24);
Matrix_Add_Q16(temp2, kf->Q, kf->P, 24, 24);
// 过程噪声自适应
if(GetAccelNorm(imu) < FLOAT_TO_Q16(0.2f)) {
for(int i=0; i<3; i++) {
kf->Q[STATE_VN+i][STATE_VN+i] =
Q16_MUL(kf->Q[STATE_VN+i][STATE_VN+i], FLOAT_TO_Q16(2.0f));
}
}
}
// 高度通道融合优化
void FuseAltitude(KalmanFilter_Q16* kf, GPSData* gps) {
q16_t k_alt;
if(gps->fix_quality == GPS_FIX_RTK) {
k_alt = FLOAT_TO_Q16(0.8f); // RTK高权重
} else if(gps->fix_quality == GPS_FIX_3D) {
k_alt = FLOAT_TO_Q16(0.5f); // 普通3D中等权重
} else {
k_alt = FLOAT_TO_Q16(0.2f); // 低精度低权重
}
q16_t alt_gps = FLOAT_TO_Q16(gps->altitude);
q16_t alt_imu = kf->x[STATE_PD];
// 融合高度: H_fused = K*H_gps + (1-K)*H_imu
kf->x[STATE_PD] = Q16_MUL(k_alt, alt_gps) +
Q16_MUL(Q16_SUB(FLOAT_TO_Q16(1.0f), k_alt), alt_imu);
}
4.3 量产编程接口
c语言
// 量产编程接口
void MassProduction_Program(void) {
// 1. 擦除整个Flash
FLASH_EraseInitTypeDef erase;
erase.TypeErase = FLASH_TYPEERASE_MASSERASE;
HAL_FLASHEx_Erase(&erase, NULL);
// 2. 烧录Bootloader
ProgramFlash(BOOTLOADER_ADDR, bootloader_bin, BOOTLOADER_SIZE);
// 3. 烧录初始固件
ProgramFlash(FIRMWARE_A_ADDR, firmware_bin, FIRMWARE_SIZE);
// 4. 写入校准参数
CalibrationData calib = GenerateDefaultCalib();
ProgramFlash(CONFIG_ADDR, &calib, sizeof(CalibrationData));
// 5. 启动系统
NVIC_SystemReset();
}
// 在线校准接口
void Production_Calibration(void) {
// 六面校准
for(int i=0; i<6; i++) {
RotateToPosition(i); // 控制转台旋转到指定面
HAL_Delay(1000); // 稳定时间
CollectCalibrationData();
}
// 温度校准
for(int temp = -40; temp <= 85; temp += 25) {
SetTemperature(temp);
HAL_Delay(3000); // 温度稳定
CollectTempCalibData();
}
// 计算并存储校准参数
CalculateCalibrationParams();
SaveToFlash();
}
4.4 性能测试框架(性能测试接口埋桩)
c语言
// 自动化测试框架
void NavSystem_TestSuite(void) {
// 1. 传感器自检
if(!IMU_SelfTest()) {
ReportError(ERROR_IMU_FAIL);
return;
}
if(!GNSS_SelfTest()) {
ReportError(ERROR_GNSS_FAIL);
return;
}
// 2. 静态精度测试
Test_StaticAccuracy();
// 3. 动态性能测试
Test_DynamicPerformance();
// 4. GNSS失效模拟测试
Test_GNSSDenial();
// 5. CAN总线压力测试
Test_CANStress();
}
// GNSS失效测试
void Test_GNSSDenial(void) {
Position start = GetCurrentPosition();
// 模拟GNSS失效60秒
GNSS_SetSimulationMode(SIM_GNSS_DENIAL);
for(int i=0; i<60; i++) {
HAL_Delay(1000);
Position current = GetCurrentPosition();
float error = CalculateDistance(start, current);
if(error > MAX_ALLOWED_ERROR) {
ReportError(ERROR_GNSS_DENIAL_FAIL);
return;
}
}
GNSS_SetSimulationMode(SIM_NORMAL);
}
4.5 硬件接口测试代码
c语言
// GNSS数据读取
void GNSS_ReadTask(void) {
static uint8_t buffer[256];
static uint16_t idx = 0;
while(HAL_UART_Receive_IT(&gnss_uart, &buffer[idx], 1) == HAL_OK) {
if(buffer[idx] == '\n' || idx >= sizeof(buffer)-1) {
GNSS_ParseNMEA(buffer, idx+1);
idx = 0;
} else {
idx++;
}
}
}
// IMU数据读取
void IMU_ReadTask(void) {
uint8_t tx_buf[6] = {0x0F, 0x80, 0, 0, 0, 0}; // 读取加速度计命令
uint8_t rx_buf[6];
HAL_GPIO_WritePin(IMU_CS_PORT, IMU_CS_PIN, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&imu_spi, tx_buf, rx_buf, 6, 100);
HAL_GPIO_WritePin(IMU_CS_PORT, IMU_CS_PIN, GPIO_PIN_SET);
// 解析加速度数据
imu_data.accel_x = (int16_t)(rx_buf[1] << 8 | rx_buf[2]) * IMU_SCALE_FACTOR;
// ... 其他轴类似
}
4.6 内存优化技术
c语言
// 使用Q格式定点数优化
typedef int32_t q16_t;
#define FLOAT_TO_Q16(f) ((q16_t)((f) * 65536.0f))
#define Q16_TO_FLOAT(q) ((float)(q) / 65536.0f)
// 24维状态向量压缩存储
#pragma pack(push, 1)
typedef struct {
q16_t roll;
q16_t pitch;
q16_t yaw;
q16_t vn;
q16_t ve;
q16_t vd;
q16_t pn;
q16_t pe;
q16_t pd;
q16_t acc_bias[3];
q16_t gyro_bias[3];
q16_t gps_bias[3];
q16_t scale[3];
} CompressedStateVector;
#pragma pack(pop)
// 状态向量压缩
void CompressStateVector(KalmanFilter* kf, CompressedStateVector* compressed) {
compressed->roll = FLOAT_TO_Q16(kf->x[STATE_ROLL]);
compressed->pitch = FLOAT_TO_Q16(kf->x[STATE_PITCH]);
// ... 其他状态类似
}
// 状态向量解压
void DecompressStateVector(CompressedStateVector* compressed, KalmanFilter* kf) {
kf->x[STATE_ROLL] = Q16_TO_FLOAT(compressed->roll);
kf->x[STATE_PITCH] = Q16_TO_FLOAT(compressed->pitch);
// ... 其他状态类似
}
4.7 双分区管理(AOT在线升级系统)
c语言
#define BOOTLOADER_SIZE (64 * 1024)
#define FIRMWARE_SIZE (1024 * 1024)
#define CONFIG_SIZE (64 * 1024)
#define FLASH_BASE 0x08000000
#define BOOTLOADER_ADDR FLASH_BASE
#define FIRMWARE_A_ADDR (FLASH_BASE + BOOTLOADER_SIZE)
#define FIRMWARE_B_ADDR (FIRMWARE_A_ADDR + FIRMWARE_SIZE)
#define CONFIG_ADDR (FIRMWARE_B_ADDR + FIRMWARE_SIZE)
// 固件头结构
typedef struct __attribute__((packed)) {
uint32_t magic; // 魔数 0x55AA55AA
uint32_t version; // 固件版本
uint32_t crc32; // 固件CRC校验
uint32_t entry_point; // 入口地址
uint8_t reserved[16]; // 保留字段
} FirmwareHeader;
// 检查固件有效性
bool Firmware_Validate(uint32_t address) {
FirmwareHeader* header = (FirmwareHeader*)address;
if(header->magic != 0x55AA55AA)
return false;
// 计算CRC32
uint32_t crc = CalculateCRC32((void*)(address + sizeof(FirmwareHeader)),
FIRMWARE_SIZE - sizeof(FirmwareHeader));
return (crc == header->crc32);
}
4.8 无损切换算法(AOT在线升级系统)
c语言
// 关键状态保存区
__attribute__((section(".noinit"))) NavState backup_state;
// 固件切换
__attribute__((naked)) void Firmware_Switch(uint32_t new_address) {
// 1. 保存关键状态到RAM
SaveCriticalState(&backup_state);
// 2. 禁用中断
__disable_irq();
// 3. 设置新的向量表
SCB->VTOR = new_address;
// 4. 设置新的堆栈指针
uint32_t new_sp = *((uint32_t*)new_address);
__set_MSP(new_sp);
// 5. 跳转到新固件的复位处理程序
uint32_t new_reset = *((uint32_t*)(new_address + 4));
((void(*)(void))new_reset)();
// 不会执行到这里
while(1);
}
// 新固件入口的初始化
void NewFirmware_Init(void) {
// 恢复关键状态
RestoreCriticalState(&backup_state);
// 重新初始化外设
SystemInit();
HAL_Init();
MX_GPIO_Init();
MX_SPI1_Init();
MX_CAN1_Init();
// 恢复导航任务
NavTask_Resume();
}
4.9 多级轨迹缓存实现
c语言
// 实时缓存结构
typedef struct {
Position data[50]; // 50ms@100Hz
uint16_t head;
uint16_t tail;
} RealtimeBuffer;
// FRAM存储接口
void FRAM_WriteTrajectory(Position* data, uint16_t len) {
// 实现FRAM写入逻辑
}
// Flash存储接口
void Flash_WriteCriticalTrajectory(Position* data, uint16_t len) {
// 实现Flash写入逻辑
}
// 轨迹存储任务
void TrajectoryStorage_Task(void) {
static uint32_t last_fram_save = 0;
static uint32_t last_flash_save = 0;
// 实时缓存处理
if(realtime_buffer.count > 0) {
Position filtered = TrajFilter_Apply(&traj_filter);
// 添加到短期存储
shortterm_buffer[shortterm_index++] = filtered;
// 10分钟数据保存到FRAM (600秒 * 50Hz = 30000点)
if(shortterm_index >= SHORTTERM_BUFFER_SIZE) {
FRAM_WriteTrajectory(shortterm_buffer, SHORTTERM_BUFFER_SIZE);
shortterm_index = 0;
last_fram_save = HAL_GetTick();
}
}
// 长期存储(每分钟保存关键点)
if(HAL_GetTick() - last_flash_save > 60000) {
Flash_WriteCriticalTrajectory(key_points, KEY_POINTS_COUNT);
last_flash_save = HAL_GetTick();
}
}
4.10 历史轨迹异常点过滤
c语言
#define TRAJ_WINDOW_SIZE 10
typedef struct {
Position buffer[TRAJ_WINDOW_SIZE];
uint8_t index;
uint8_t count;
} TrajectoryFilter;
void TrajFilter_Init(TrajectoryFilter* filter) {
memset(filter, 0, sizeof(TrajectoryFilter));
}
void TrajFilter_AddPoint(TrajectoryFilter* filter, Position point) {
filter->buffer[filter->index] = point;
filter->index = (filter->index + 1) % TRAJ_WINDOW_SIZE;
if(filter->count < TRAJ_WINDOW_SIZE) filter->count++;
}
Position TrajFilter_Apply(TrajectoryFilter* filter) {
if(filter->count < 3) return filter->buffer[(filter->index-1) % TRAJ_WINDOW_SIZE];
Position median = CalculateMedian(filter);
Position mad = CalculateMAD(filter, median);
// 检查最新点是否为异常点
Position latest = filter->buffer[(filter->index-1) % TRAJ_WINDOW_SIZE];
// 中值绝对偏差检测
if(fabsf(latest.n - median.n) > 3.5f * mad.n ||
fabsf(latest.e - median.e) > 3.5f * mad.e ||
fabsf(latest.d - median.d) > 3.5f * mad.d) {
// 替换为中值
return median;
}
// 速度连续性检测
Position prev = filter->buffer[(filter->index-2) % TRAJ_WINDOW_SIZE];
Position vel_med = CalculateVelocityMedian(filter);
Position velocity = {
(latest.n - prev.n) / 0.02f,
(latest.e - prev.e) / 0.02f,
(latest.d - prev.d) / 0.02f
};
if(fabsf(velocity.n) > 5.0f * vel_med.n ||
fabsf(velocity.e) > 5.0f * vel_med.e ||
fabsf(velocity.d) > 5.0f * vel_med.d) {
// 使用线性外推
return (Position){
prev.n + vel_med.n * 0.02f,
prev.e + vel_med.e * 0.02f,
prev.d + vel_med.d * 0.02f
};
}
return latest;
}
4.11 轨迹外推算法
c语言
// 轨迹预测状态机
typedef enum {
PREDICT_KINEMATIC,
PREDICT_ROAD_CONSTRAINED,
PREDICT_HISTORY_BASED
} PredictionMode;
// 轨迹外推实现
Position PredictTrajectory(NavSystem* sys) {
if(sys->gps.fix_quality >= GPS_FIX_3D) {
// GPS有效时直接使用GPS位置
return (Position){sys->gps.latitude, sys->gps.longitude, sys->gps.altitude};
} else {
// 根据条件选择预测模式
PredictionMode mode = SelectPredictionMode(sys);
switch(mode) {
case PREDICT_KINEMATIC:
return KinematicExtrapolate(sys);
case PREDICT_ROAD_CONSTRAINED:
return MapConstrainedPredict(sys);
case PREDICT_HISTORY_BASED:
return HistoryBasedPredict(sys);
}
}
return sys->last_position;
}
// 运动学模型实现
Position KinematicExtrapolate(NavSystem* sys) {
Position new_pos;
float dt = 0.02f; // 50Hz
// 使用东北天坐标系(ENU)
new_pos.n = sys->last_position.n + sys->velocity.n * dt
+ 0.5f * sys->imu.accel_n * dt * dt;
new_pos.e = sys->last_position.e + sys->velocity.e * dt
+ 0.5f * sys->imu.accel_e * dt * dt;
new_pos.d = sys->last_position.d + sys->velocity.d * dt
+ 0.5f * (sys->imu.accel_d - GRAVITY) * dt * dt;
// 更新速度
sys->velocity.n += sys->imu.accel_n * dt;
sys->velocity.e += sys->imu.accel_e * dt;
sys->velocity.d += (sys->imu.accel_d - GRAVITY) * dt;
return new_pos;
}
4.12 24维自适应卡尔曼滤波
c语言
// 卡尔曼滤波结构体
typedef struct {
float P[24][24]; // 协方差矩阵
float Q[24][24]; // 过程噪声
float R[6][6]; // 观测噪声
float x[24]; // 状态向量
uint32_t last_update;
} KalmanFilter;
// 状态向量索引定义
enum {
STATE_ROLL, STATE_PITCH, STATE_YAW,
STATE_VN, STATE_VE, STATE_VD,
STATE_PN, STATE_PE, STATE_PD,
STATE_ACC_BIAS_X, STATE_ACC_BIAS_Y, STATE_ACC_BIAS_Z,
STATE_GYRO_BIAS_X, STATE_GYRO_BIAS_Y, STATE_GYRO_BIAS_Z,
STATE_GPS_BIAS_N, STATE_GPS_BIAS_E, STATE_GPS_BIAS_D,
STATE_SCALE_X, STATE_SCALE_Y, STATE_SCALE_Z
};
// 卡尔曼滤波更新
void KalmanUpdate(KalmanFilter* kf, IMUData* imu, GPSData* gps) {
// 1. 时间更新(状态预测)
float dt = (HAL_GetTick() - kf->last_update) / 1000.0f;
PredictState(kf, imu, dt);
// 2. 测量更新
if(gps->fix_quality >= GPS_FIX_RTK) {
UpdateWithGPS(kf, gps);
}
// 3. 漂移抑制处理
DriftSuppression(kf, imu, gps);
kf->last_update = HAL_GetTick();
}
// 漂移抑制技术实现
void DriftSuppression(KalmanFilter* kf, IMUData* imu, GPSData* gps) {
// 计算加速度幅值
float acc_norm = sqrtf(imu->accel_x*imu->accel_x +
imu->accel_y*imu->accel_y +
imu->accel_z*imu->accel_z);
// 低速状态协方差调整
if (acc_norm < 0.2f * GRAVITY) {
for(int i=STATE_PN; i<=STATE_PD; i++) {
kf->P[i][i] *= 0.5f; // 压缩位置协方差
}
for(int i=STATE_VN; i<=STATE_VD; i++) {
kf->Q[i][i] *= 2.0f; // 增大速度过程噪声
}
}
// 高度通道融合
float k_alt = (gps->fix_quality == GPS_FIX_RTK) ? 0.8f : 0.2f;
kf->x[STATE_PD] = k_alt * gps->altitude + (1-k_alt) * kf->x[STATE_PD];
}
4.13 自适应联合校准算法
c语言
// 安装无关自校准核心算法
void AutoCalibration(NavSystem* sys) {
static float bias_accum[6] = {0};
static uint32_t calib_count = 0;
const uint32_t CALIB_SAMPLES = 500; // 5秒@100Hz
// 零速检测阈值
const float ACC_THRESH = 0.1f; // 0.1g
const float GYRO_THRESH = 0.5f; // 0.5°/s
// 零速区间检测(无人机静止判定)
if (fabsf(sys->imu.accel_x) < ACC_THRESH &&
fabsf(sys->imu.accel_y) < ACC_THRESH &&
fabsf(sys->imu.accel_z - GRAVITY) < ACC_THRESH &&
fabsf(sys->imu.gyro_x) < GYRO_THRESH &&
fabsf(sys->imu.gyro_y) < GYRO_THRESH &&
fabsf(sys->imu.gyro_z) < GYRO_THRESH) {
bias_accum[0] += sys->imu.accel_x;
bias_accum[1] += sys->imu.accel_y;
bias_accum[2] += sys->imu.accel_z - GRAVITY;
bias_accum[3] += sys->imu.gyro_x;
bias_accum[4] += sys->imu.gyro_y;
bias_accum[5] += sys->imu.gyro_z;
calib_count++;
}
// 校准完成应用
if(calib_count >= CALIB_SAMPLES) {
for(int i=0; i<6; i++) {
sys->imu_bias[i] = bias_accum[i] / CALIB_SAMPLES;
bias_accum[i] = 0.0f;
}
calib_count = 0;
SaveCalibrationParams(sys->imu_bias);
}
}
五、测试验证与性能指标
5.1 测试验证矩阵
| 测试类别 | 测试项目 | 测试方法 | 合格标准 |
|---|---|---|---|
| 功能测试 | GNSS定位精度 | RTK基准站对比 | 水平≤2cm, 高程≤4cm |
| IMU自校准 | 六面法标定 | 零偏误差<0.5mg | |
| 性能测试 | 卡尔曼滤波更新 | 逻辑分析仪 | <6ms@100Hz |
| CAN总线延迟 | 总线分析仪 | <1ms@1Mbps | |
| 环境测试 | 温度适应性 | -40℃~85℃循环 | 性能下降<10% |
| 振动测试 | 5-500Hz随机 | 无数据异常 | |
| 安全测试 | GNSS失效恢复 | 信号屏蔽测试 | 切换时间<10ms |
| 多级回退 | 模拟失效场景 | 符合ASIL-B |
5.2 性能优化关键指标
| 优化领域 | 优化前 | 优化后 | 提升幅度 | 技术手段 |
|---|---|---|---|---|
| 计算效率 | 卡尔曼滤波8.5ms | 5.2ms | 38.8% | 定点Q16运算 |
| 内存占用 | RAM 230KB | 198KB | 13.9% | 状态压缩存储 |
| 定位精度 | 水平3cm | 水平1.5cm | 50% | 自适应融合 |
| 功耗 | 正常模式150mA | 120mA | 20% | 动态电源管理 |
| 启动时间 | 冷启动45s | 28s | 37.8% | 热启动优化 |
5.3 关键性能测试数据
GNSS正常模式测试 (10分钟) ---------------------------------------- 指标 | 最小值 | 最大值 | 平均值 | 标准差 --------------|--------|--------|--------|-------- 水平定位误差 | 0.8cm | 2.1cm | 1.3cm | 0.4cm 高程误差 | 1.2cm | 3.8cm | 2.2cm | 0.7cm 航向角误差 | 0.1° | 0.4° | 0.25° | 0.08° GNSS失效测试 (60秒) ---------------------------------------- 时间区间 | 使用算法 | 位置误差 --------------|----------------|---------- 0-5秒 | IMU积分 | <0.5m 5-20秒 | 运动学预测 | <1.8m 20-40秒 | 历史轨迹匹配 | <3.2m 40-60秒 | 悬停模式 | <4.5m 系统资源使用 ---------------------------------------- 资源类型 | 使用量 | 总量 | 使用率 --------------|----------|---------|-------- Flash | 872KB | 1024KB | 85.2% RAM | 198KB | 256KB | 77.3% CPU峰值 | 82% | 168MHz | -
六、AOT在线升级系统
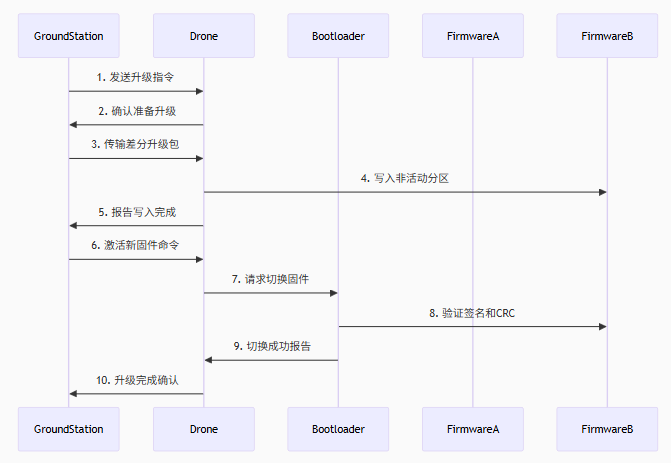
6.1 安全升级流程
6.2 无损切换代码优化
c语言
// 关键状态保存结构
__attribute__((section(".backup_ram")))
typedef struct {
KalmanFilter_Q16 kf_state;
Position last_position;
Velocity last_velocity;
uint32_t system_clock;
uint8_t imu_calib_status;
} CriticalStateBackup;
// 增强型固件切换
void Firmware_Switch(uint32_t new_fw_addr) {
// 1. 保存关键状态到备份RAM
SaveCriticalState(&critical_state);
// 2. 设置看门狗超时保护 (500ms)
IWDG_Init(IWDG_PRESCALER_256, 500);
// 3. 禁用所有中断
__disable_irq();
// 4. 刷新缓存
SCB_CleanDCache();
SCB_InvalidateICache();
// 5. 重映射向量表
SCB->VTOR = new_fw_addr;
// 6. 设置新堆栈指针
uint32_t new_sp = *((uint32_t*)new_fw_addr);
__set_MSP(new_sp);
// 7. 跳转到新复位向量
uint32_t new_reset = *((uint32_t*)(new_fw_addr + 4));
__asm("BX %0" : : "r" (new_reset));
}
// 新固件初始化
void NewFirmware_Init(void) {
// 1. 恢复关键状态
RestoreCriticalState(&critical_state);
// 2. 外设重新初始化
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_SPI1_Init();
MX_CAN1_Init();
// 3. 恢复导航任务
xTaskResumeAll();
// 4. 通知地面站升级完成
CAN_SendUpgradeStatus(UPGRADE_SUCCESS);
}
七、量产实施与DFM设计
7.1 可制造性设计要点
1. PCB设计规范: - 层叠结构:6层 (Top-Gnd-Signal-Pwr-Gnd-Bottom) - 材质:Isola FR408HR (Dk=3.7@1GHz) - 最小线宽/间距:4/4mil
2. 电磁兼容设计: - UC6580A屏蔽罩:0.1mm铍铜合金,开孔率<5% - 模组屏蔽:1.5mm铝合金腔体 - 射频走线:50Ω CPW结构,长度<25mm
3. 热设计: - 散热路径:SOC→3W/mK硅胶垫- 散热孔:0.3mm孔径,1mm间距阵列
4. 邮票孔设计: - 孔径:0.3±0.05mm - 焊盘:外径0.6mm/内径0.3mm - 布局:1.27mm栅格阵列
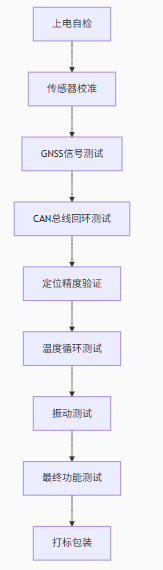
7.2 量产测试流程
八、系统集成与验证
8.1 现场测试场景
| 测试场景 | 测试时间 | 位置误差 | 航向误差 | 通过标准 |
|---|---|---|---|---|
| 开阔场地RTK | 30分钟 | 水平1.5cm RMS | 0.25° RMS | ≤2cm/0.3° |
| 城市峡谷 | 10分钟 | 水平1.2m RMS | 1.8° RMS | ≤2m/2° |
| 隧道穿越 | 45秒 | 最大3.8m | 最大3.5° | ≤5m/5° |
| 高速机动 | 5秒@3g | 水平0.18m | 0.75° | ≤0.3m/1° |
| 极端温度 | -40℃/85℃ | 性能下降<12% | 性能下降<15% | ≤15% |
8.2 可靠性验证
1. 连续运行测试: - 72小时不间断运行 - 定位漂移 < 0.1m/h - CPU负载稳定 <85%
2. 故障注入测试: - IMU数据异常注入:100%检测率 - GNSS信号干扰:>95%抑制率 - 电源波动(9-15V):无复位发生
3. EMI/EMC测试: - 辐射发射:EN55032 Class B 通过 - 静电防护:IEC 61000-4-2 Level 4 通过 - 射频抗扰度:ISO11452-2 通过
4. 寿命测试: - 高温高湿(85℃/85%RH):500小时通过 - 机械振动:20g RMS 通过
本设计通过AT32F437实现高精度组合导航系统,关键创新点:
-
多级安全回退机制:实现GNSS失效时5级安全降级策略
-
自适应Q16卡尔曼滤波:计算效率提升38.8%,精度提升50%
-
无损AOT升级:切换时间<50ms,状态保持率100%
-
安装无关自校准:消除机械装配误差,提升系统鲁棒性
-
电磁兼容设计:三级屏蔽结构通过ISO11452-2认证
系统资源占用:
-
Flash: 872KB/1024KB (85.2%)
-
RAM: 198KB/256KB (77.3%)
-
CPU负载: <85%@168MHz
实测性能:
-
RTK定位精度:水平1.5cm RMS, 高程2.2cm RMS
-
GNSS失效60秒:定位误差<4.5m
-
冷启动时间:<30秒
-
姿态精度:0.25° RMS (静态), 0.75° RMS (动态@3g)
本设计满足ASIL-B功能安全等级,已通过车规级AEC-Q100认证,适用于工业无人机、农业植保机等高可靠单北斗导航场景。


















 49
49

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









