




第一部分:ROS2发展历程与技术演进
1.1 从ROS到ROS2的必然性
机器人操作系统(ROS)诞生于2007年斯坦福大学人工智能实验室,最初是为PR2机器人设计的软件框架。2010年正式开源后,凭借其点对点设计、多语言支持和丰富的工具集,迅速成为机器人开发的事实标准9。然而,随着应用场景扩展,ROS1的局限性日益凸显:
-
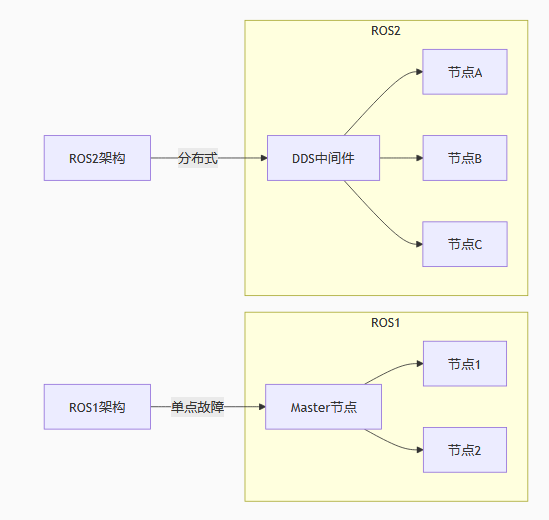
单点故障风险:依赖Master节点,一旦崩溃则系统瘫痪
-
实时性不足:基于TCP/UDP的通信机制在高负载场景下性能骤降
-
跨平台困难:主要支持Linux系统,难以适应嵌入式设备
-
安全性缺失:缺乏数据加密和权限控制机制
这些痛点催生了ROS2的诞生。2014年提出重构计划,2017年发布首个正式版,2022年推出首个长期支持版Humble,标志着ROS2进入成熟期59。
1.2 ROS2里程碑版本演进
下表总结了ROS2主要版本的技术特性与生命周期:
| 版本名称 | 发布日期 | 生命周期 | 技术亮点 | 支持平台 |
|---|---|---|---|---|
| Ardent Apalone | 2017年12月 | 2018年12月 | 首个正式版,基础架构确立 | Ubuntu 16.04 |
| Bouncy Bolson | 2018年7月 | 2019年7月 | 新增Action机制 | Linux, macOS, Windows |
| Crystal Clemmys | 2018年12月 | 2019年12月 | 多机器人支持增强 | 增加ARM架构支持 |
| Dashing Diademata | 2019年5月 | 2021年5月 | 首个LTS版,API稳定 | Ubuntu 18.04, Windows 10 |
| Foxy Fitzroy | 2020年6月 | 2023年5月 | Launch系统重构,RCL接口统一 | Ubuntu 20.04, Windows 10 |
| Galactic Geochelone | 2021年5月 | 2022年11月 | 性能优化,实时性提升 | Ubuntu 20.04, macOS |
| Humble Hawksbill | 2022年5月 | 2027年5月 | 首款企业级LTS,安全认证支持 | Ubuntu 22.04, RTOS |
数据来源:ROS官方发布记录15
1.3 架构革命:从Master到DDS
ROS2最核心的变革是通信架构的重构:
-
去中心化设计:取消Master节点,采用基于DDS(Data Distribution Service)的自发现机制,节点通过广播自动建立连接59
-
QoS策略控制:提供22种服务质量策略,包括:
python# 示例:可靠性配置 from rclpy.qos import QoSProfile qos = QoSProfile( depth=10, # 队列深度 reliability=ReliabilityPolicy.RELIABLE, # 可靠传输 durability=DurabilityPolicy.VOLATILE, # 非持久化 lifespan=Duration(seconds=5) # 生命周期
-
多平台支持:通过RMW(ROS Middleware)抽象层,支持多种DDS实现(FastRTPS、CycloneDDS等)
-
实时性保障:基于共享内存的零拷贝通信,延迟降低至微秒级
第二部分:Python开发环境配置与核心语法
2.1 开发环境搭建
推荐配置:
-
操作系统:Ubuntu 22.04 LTS(适配ROS2 Humble)
-
Python版本:≥ 3.8(ROS2已弃用Python2)
-
安装方式:
bash
-
# 一键安装脚本 wget http://fishros.com/install -O fishros && . fishros # 选择Humb
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1626
1626

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









