







 本文介绍了如何使用ROS和北通阿修罗手柄控制小乌龟模拟器。通过查看节点与话题关系,确定/turtle1/cmd_vel话题用于控制乌龟,利用手柄的Axes[1]和Axes[2]控制线速度和角速度。在遇到手柄操控无法持续的问题上,作者寻求解决方案。
本文介绍了如何使用ROS和北通阿修罗手柄控制小乌龟模拟器。通过查看节点与话题关系,确定/turtle1/cmd_vel话题用于控制乌龟,利用手柄的Axes[1]和Axes[2]控制线速度和角速度。在遇到手柄操控无法持续的问题上,作者寻求解决方案。
文章借鉴了这边博客https://blog.youkuaiyun.com/u014587147/article/details/75673110。
这篇文章记录下自己操作过程中遇到的问题,更加适合新手。
1、使用终端分别运行下面三个命令,启动小乌龟和键盘操控。
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
接下来,查看节点与话题之间的关系
rqt_graph界面如下
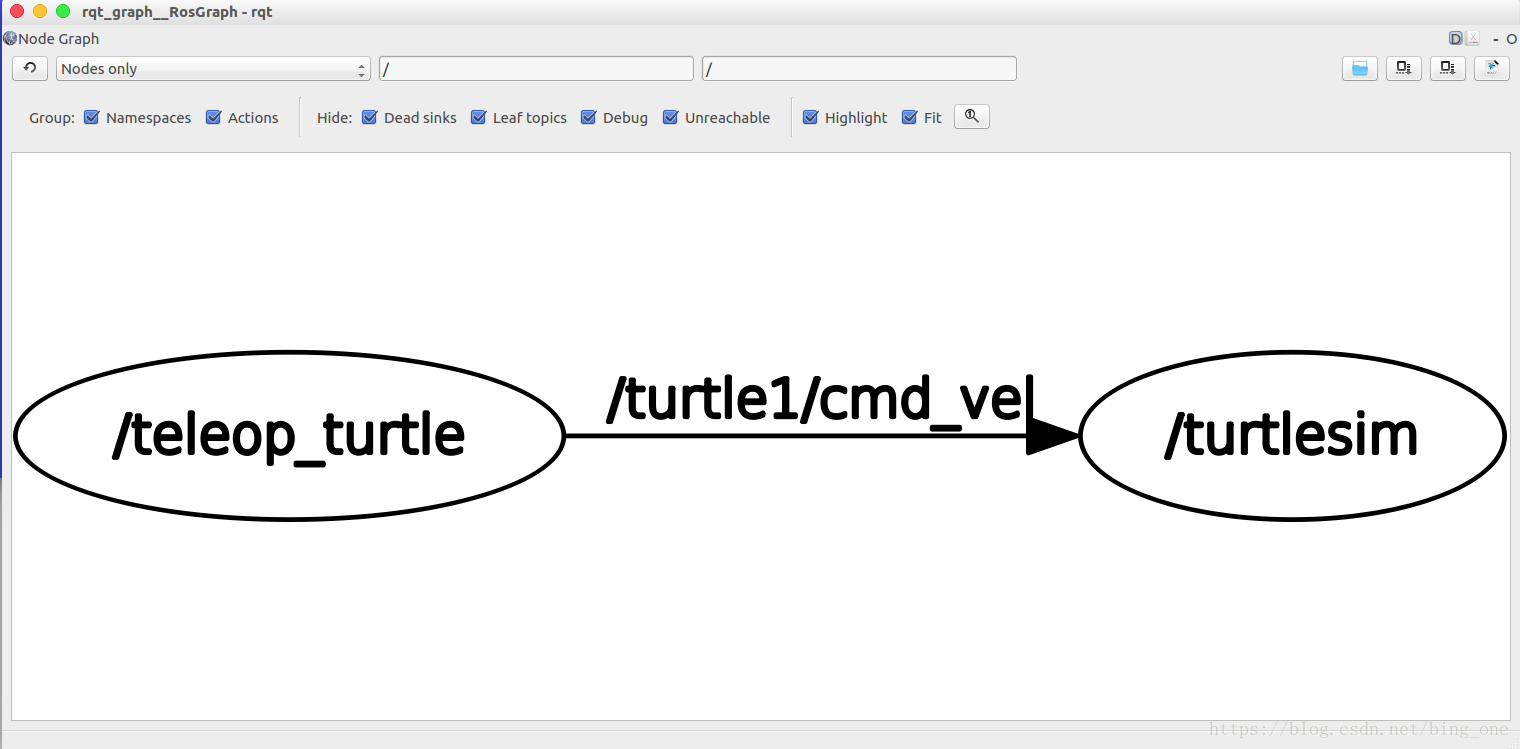 椭圆内的是节点,横线上是话题。通过rqt_graph可以看到,小乌龟turtlesim节点订阅/turtle1/cmd_vel话题.那么,我们可以通过向这个话题发布消息来控制小乌龟。接下来查看话题的类型
椭圆内的是节点,横线上是话题。通过rqt_graph可以看到,小乌龟turtlesim节点订阅/turtle1/cmd_vel话题.那么,我们可以通过向这个话题发布消息来控制小乌龟。接下来查看话题的类型
rostopic type /turtle1/cmd_vel结果如下
geometry_msgs/Twist再查看这个话题发布哪些消息来控制乌龟
rosmsg show geometry_msgs/Twist结果如下
geometry_msgs/Vector3 linear
float64 x
float6 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









