



 本文精选了Go语言相关的最新资源,包括k8s实战课程、Go与Rust对比、使用Go实现WebRTC应用的播客、GoRemoteFest2020会议视频、Paxos与Raft论文、树莓派集群经验分享及全功能SFTP服务器项目sftpgo。此外,还提供了gopherdaily归档链接。
本文精选了Go语言相关的最新资源,包括k8s实战课程、Go与Rust对比、使用Go实现WebRTC应用的播客、GoRemoteFest2020会议视频、Paxos与Raft论文、树莓派集群经验分享及全功能SFTP服务器项目sftpgo。此外,还提供了gopherdaily归档链接。
建议订阅的朋友点击”阅读原文“打开存档网页,再行跳转到各个文章的内容页面。
•慕课实战课:k8s实战 - https://coding.imooc.com/class/284.html
1.Go vs. Java vs. Rust - https://medium.com/@dexterdarwich/comparison-between-java-go-and-rust-fdb21bd5fb7c2.播客:使用Go实现WebRTC应用 - https://changelog.com/gotime/127
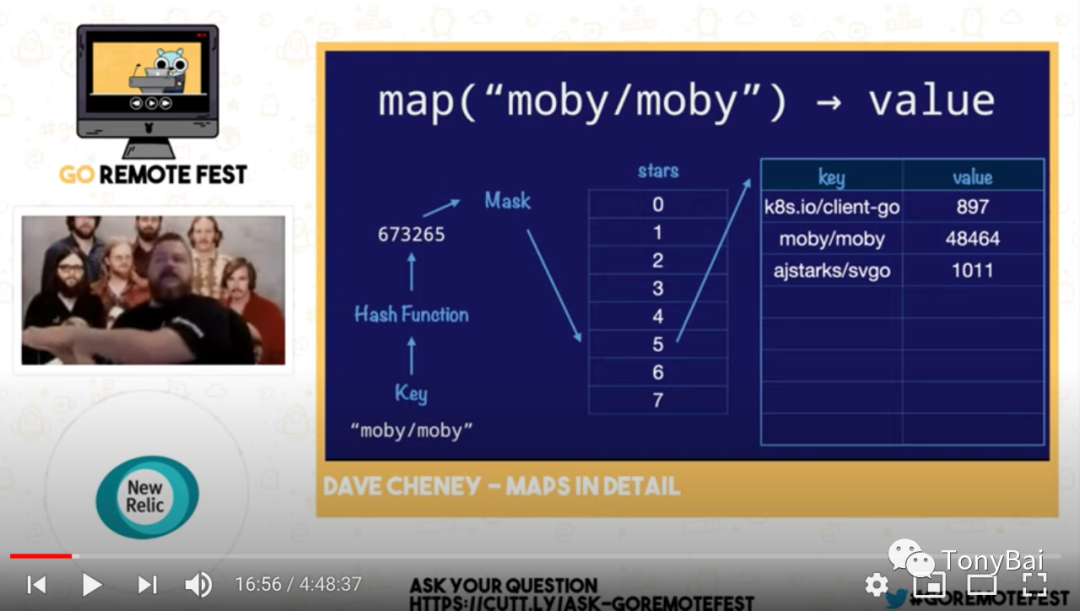
3.油管视频:GoRemoteFest 2020会议视频全集 - https://www.youtube.com/watch?v=OZSJ2fwSSUM&list=PLdeYrDm3hJTh21xi3rezgsSqrZl_Xs0VA4.Paper: Paxos vs. Raft - https://arxiv.org/pdf/2004.05074.pdf

5.树莓派集群的5年 - https://www.raspberrypi.org/blog/five-years-of-raspberry-pi-clusters/6.sftpgo: 全功能且高度可配置的SFTP服务器 - https://github.com/drakkan/sftpgo
•gopherdaily归档:https://github.com/bigwhite/gopherdaily•编辑:Tony Bai (https://tonybai.com)
往期推荐
使用nomad实现集群管理和微服务部署调度
go protobuf v1败给了gogo protobuf,那v2呢?

















 220
220

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









