







 SIFT(尺度不变特征变换)是一种稳定局部特征,由David G.Lowe提出,能抵抗旋转、尺度缩放和亮度变化。本文详细介绍了SIFT的原理,包括高斯金字塔构建、DoG金字塔及其极值检测、去除不良极值点的方法,以及特征点方向的确定。通过对图像进行高斯平滑和差分操作,找到尺度和方向不变的特征点,以提高图像识别的鲁棒性。
SIFT(尺度不变特征变换)是一种稳定局部特征,由David G.Lowe提出,能抵抗旋转、尺度缩放和亮度变化。本文详细介绍了SIFT的原理,包括高斯金字塔构建、DoG金字塔及其极值检测、去除不良极值点的方法,以及特征点方向的确定。通过对图像进行高斯平滑和差分操作,找到尺度和方向不变的特征点,以提高图像识别的鲁棒性。
SIFT 概述
SIFT的全称是Scale Invariant Feature Transform,尺度不变特征变换,由加拿大教授David G.Lowe提出的。SIFT特征对旋转、尺度缩放、亮度变化等保持不变性,是一种非常稳定的局部特征。
SIFT 原理
1.高斯金字塔
先从图像金字塔说起,图像金字塔是从同一个图像在不同分辨率下的到的一组结果。如下图所示
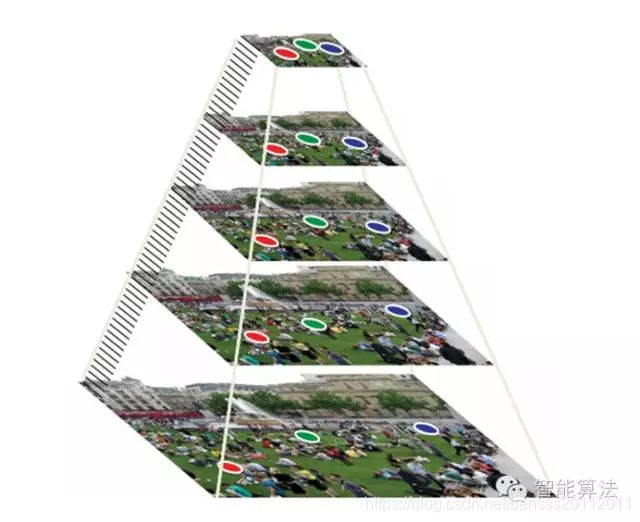
然而图像金字塔缺乏尺度的特性,因此诞生出了高斯金子塔。
高斯金字塔的尺度表达是通过不同σ的高斯函数来对图像进行卷积(即对图像做高斯平滑):
L
(
x
,
y
,
σ
)
=
G
(
x
,
y
,
σ
)
∗
I
(
x
,
y
)
L(x, y, σ) = G(x, y, σ) \ast{I(x, y)}
L(x,y,σ)=G(x,y,σ)∗I(x,y)其中G(x, y, σ) 是高斯核函数,I(x, y, σ)为输入图像
G
(
x
,
y
,
σ
)
=
1
2
π
σ
2
e
x
2
+
y
2
2
σ
2
G(x, y, σ) = \frac{1}{2\pi{\sigma^2}}e^\frac{x^2+y^2}{2\sigma^2}
G(x,y,σ)=2πσ21e2σ2x2+y2在构建高斯金子塔的时候,有组和层之分:
1.组(o)为类似图像金字塔的层数,也就是图片是长宽按
1
2
\frac{1}{2}
21进行降采样,也就是图像缩小,分辨率降低。组总数Octave
2.层(s)为组内不同σ进行高斯模糊的图片,其大小一致,一般假设组内有S层,相邻两层之间的尺度相差一个比例因子k,
k
=
2
1
S
k=2^\frac{1}{S}
k=2S1,即假设上一层由
k
σ
k\sigma
kσ模糊,则接下来一层由
k
2
σ
k^2\sigma
k2σ模糊。层总数S
由于要构成尺度连续,则上一组的倒数第三层的尺度作为下一组的第一层,后面讲完DOG金字塔时候会举例说明,可得尺度空间关系式子
σ
(
o
,
s
)
=
σ
0
⋅
2
o
+
s
S
\sigma(o, s) = \sigma_0\cdot2^{o+\frac{s}{S}}
σ(o,s)=σ0⋅2o+Ss
高斯金字塔构建过程
以一个512×512 512×512的图像I为例,构建高斯金字塔步骤:(从0开始计数,倒立的金字塔)
1.金字塔的组数,
(
l
o
g
2
512
=
9
)
−
3
(log_2 512=9) - 3
(log2512=9)−3,构建的金字塔的组数为6。取每组的层数为3。
(
O
=
l
o
g
2
m
i
n
(
l
e
n
g
t
h
,
w
i
d
t
h
)
−
a
O = log_2min(length,width) -a
O=log2min(length,width)−a 一般a为3)
2.构建第0组,将图像的宽和高都增加一倍,变成1024×1024 ( I 0 I_0 I0)。第0层 I 0 ∗ G ( x , y , σ 0 ) I_0 ∗G(x,y,σ_0 ) I0∗G(x,y,σ0),第1层 I 0 ∗ G ( x , y , k σ 0 ) I_ 0 ∗G(x,y,kσ_0 ) I0∗G(x,y,kσ0),第2层 I 0 ∗ G ( x , y , k 2 σ 0 ) I_0∗G(x,y,k^2σ_0) I0∗G(x,y,k2σ0)
3.构建第1组,对 I 0 I_0 I0降采样变成512×512 ( I 1 I _1 I1)。第0层 I 1 ∗ G ( x , y , 2 σ 0 ) I_1 ∗G(x,y,2σ_0) I1∗G(x,y,2σ0),第1层 I 1 ∗ G ( x , y , 2 k σ 0 ) I_1 ∗G(x,y,2kσ_0 ) I1∗G(x,y,2kσ0)
4.⋮ ⋮
5.构建第o组,第s层 I o ∗ G ( x , y , 2 o k s σ 0 ) I_o ∗G(x,y,2^o k^s σ_0 ) Io∗G(x,y,2oksσ0)
2.DoG金字塔
由于我们需要在高斯金子塔用高斯算子进行计算LoG,但是其运算量大,转而采用DoG(差分高斯),利用差分来逼近求导方法来近似LoG。因而出现DoG金字塔,其构建过程是利用高斯金字塔的图像两两做差来得到DoG图像,你们会看到高斯金字塔每组S+3层,DoG金字塔的每组有S+2层会感到很迷。请接着看下面,等下会说清楚。
先看DoG金子塔,如图所示:
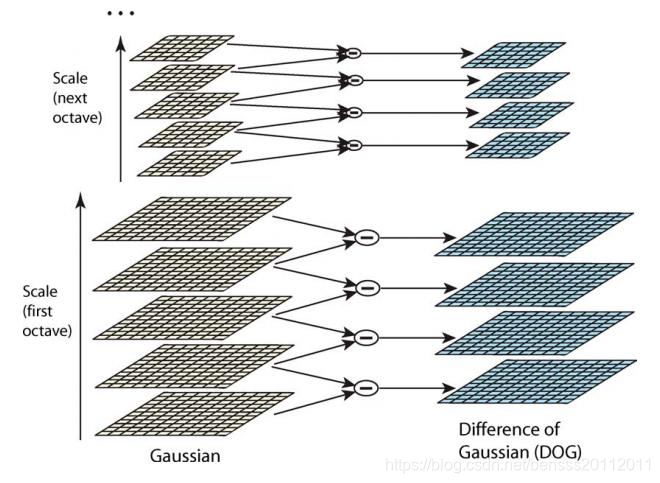
左侧的为高斯金字塔,右侧为差分金字塔,每两层高斯金字塔差分生成DoG金子塔,假设有分别
σ
,
k
σ
\sigma,k\sigma
σ,kσ的图像做差分,即后者图像减去前者图像得出的差分为
σ
\sigma
σ的图像。
知道如何生成DoG金字塔原理后,就来看看
2.1 DoG极值检测
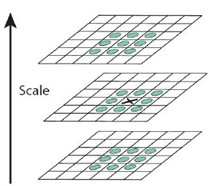
假设极值点为图中标X的位置,我们通过上一层的9个点,下一层的9个点,中间层8个点总共26个点,与X位置进行比较来检测极值。一般程序通过将这27个点组成数组,通过max与min来检测最大值与最小值。
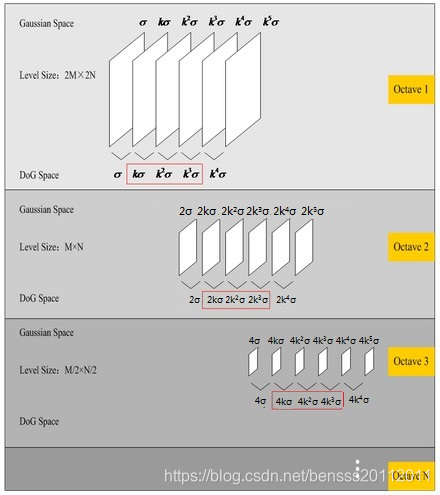
好了,讲到这我们可以解决上面DoG金字塔为S+2层,高斯金字塔为S+3层和尺度连续性问题了。
我们一般取DoG金字塔中间三层为检测的对象。这考虑到尺度连续性问题,如S = 3,则在Octave1组中
k
=
2
1
3
k=2^\frac{1}{3}
k=231,则中间三层为
k
σ
=
2
1
3
σ
,
k
2
σ
=
2
2
3
σ
,
k
3
σ
=
2
3
3
σ
=
2
σ
k\sigma = 2^\frac{1}{3}\sigma,k^2\sigma=2^\frac{2}{3}\sigma,k^3\sigma=2^\frac{3}{3}\sigma=2\sigma
kσ=231σ,k2σ=232σ,k3σ=233σ=2σ。在Octave2组中DoG的第二层
2
k
σ
=
2
⋅
2
1
3
σ
=
2
4
3
2k\sigma=2\cdot2^\frac{1}{3}\sigma=2^\frac{4}{3}
2kσ=2⋅231σ=234即可看出构成尺度连续性了。而且如图所示:高斯金字塔的第一组倒数第三层
k
3
σ
k^3\sigma
k3σ图像降采样作为第二组高斯金字塔的第一层图像,且每组第一层图像都是按这样方法得到的。
要想检测中间这三层分别的极值点,这三层最前面那一层需要上层图像,最后面一层需要下层图像。则DoG金字塔每组需要S+2层才能够检测中间三层的极值。而要想得到这S+2层DoG图像,需要高斯金字塔有S+3层图像,因为S+2层DoG图像的得到需要S+2次减法,而S+2次减法需要S+3幅图像,如图中所示:
2.2 删除不好的极值点
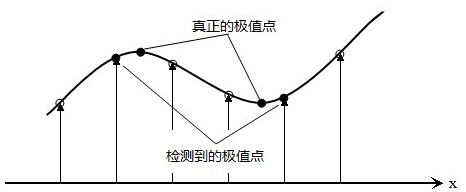
由于我们检测的极值点是在离散空间进行的,因此其极值点不一定是真正意义的极值点,我们可以从一维图像看出,我们在曲线上抽取离散点,离散点的极值点与该曲线的真正的极值点,因而我们要做曲线拟合做极值点求解。基本思想:通过泰勒公式来求解极值点。
在一维情况下,泰勒公式在
x
0
x_0
x0处附近展开至二阶为:
f
(
x
)
=
f
(
x
0
)
+
f
′
(
x
0
)
(
x
−
x
0
)
+
f
′
′
(
x
0
)
2
(
x
−
x
0
)
2
f(x) = f(x_0) + f'(x_0)(x-x_0)+\frac{f''(x_0)}{2}(x-x_0)^2
f(x)=f(x0)+f′(x0)(x−x0)+2f′′(x0)(x−x0)2
在多维情况下,假设候选特征点x,其偏移量定义为Δx Δx,其对比度为D(x)的绝对值
∣
D
(
x
)
∣
∣D(x)∣
∣D(x)∣,对D(x)应用泰勒展开式:
D
(
x
)
=
D
+
∂
D
T
∂
x
Δ
x
+
1
2
Δ
x
T
∂
2
D
∂
x
2
Δ
x
D(x) = D + \frac{\partial D^T}{\partial x}\Delta x+ \frac{1}{2}\Delta x^T\frac{\partial ^2D}{\partial x^2}\Delta x
D(x)=D+∂x∂DTΔx+21ΔxT∂x2∂2DΔx
一般,
∂
D
T
∂
x
\frac{\partial D^T}{\partial x}
∂x∂DT用J表示,为雅可比矩阵,
∂
2
D
∂
x
2
\frac{\partial ^2D}{\partial x^2}
∂x2∂2D为H表示,为海森矩阵。上述只是简化形式,下面是将矩阵展开:
D
(
Δ
x
,
Δ
y
,
Δ
σ
)
=
D
(
x
,
y
,
σ
)
+
[
∂
D
x
∂
D
y
∂
D
σ
]
[
Δ
x
Δ
y
Δ
σ
]
+
1
2
[
Δ
x
Δ
y
Δ
σ
]
[
∂
2
D
∂
x
2
∂
2
D
∂
x
∂
y
∂
2
D
∂
x
∂
σ
∂
2
D
∂
y
∂
x
∂
2
D
∂
y
2
∂
2
D
∂
y
∂
σ
∂
2
D
∂
σ
∂
x
∂
2
D
∂
σ
∂
y
∂
2
D
∂
σ
2
]
[
Δ
x
Δ
y
Δ
σ
]
D(\Delta x,\Delta y,\Delta \sigma) = D(x,y,\sigma)+\begin{bmatrix} \frac{\partial D}{x} & \frac{\partial D}{y} & \frac{\partial D}{\sigma} \end{bmatrix}\begin{bmatrix}\Delta x\\ \Delta y\\ \Delta \sigma \end{bmatrix}+\frac{1}{2}\begin{bmatrix}\Delta x &\Delta y & \Delta \sigma\end{bmatrix}\begin{bmatrix} \frac{\partial ^2D}{\partial x^2} & \frac{\partial ^2D}{\partial x\partial y} &\frac{\partial ^2D}{\partial x\partial \sigma} \\ \frac{\partial ^2D}{\partial y\partial x}& \frac{\partial ^2D}{\partial y^2} & \frac{\partial ^2D}{\partial y\partial \sigma}\\ \frac{\partial ^2D}{\partial \sigma\partial x}&\frac{\partial ^2D}{\partial \sigma\partial y} & \frac{\partial ^2D}{\partial \sigma^2} \end{bmatrix}\begin{bmatrix} \Delta x\\ \Delta y\\ \Delta \sigma \end{bmatrix}
D(Δx,Δy,Δσ)=D(x,y,σ)+[x∂Dy∂Dσ∂D]⎣⎡ΔxΔyΔσ⎦⎤+21[ΔxΔyΔσ]⎣⎢⎡∂x2∂2D∂y∂x∂2D∂σ∂x∂2D∂x∂y∂2D∂y2∂2D∂σ∂y∂2D∂x∂σ∂2D∂y∂σ∂2D∂σ2∂2D⎦⎥⎤⎣⎡ΔxΔyΔσ⎦⎤
我们利用其简化形式,由于极值点可利用一阶导数为0来求得,因此,对简化的公式两边求导,整合后可得
Δ
x
=
−
∂
2
D
−
1
∂
x
2
∂
D
(
x
)
∂
x
=
−
H
−
1
J
\Delta x = -\frac{\partial^2D^{-1}}{\partial x^2}\frac{\partial D(x)}{\partial x} = -H^{-1}J
Δx=−∂x2∂2D−1∂x∂D(x)=−H−1J
矩阵求导参考这个网站: https://en.wikipedia.org/wiki/Matrix_calculus#Scalar-by-vector_identities
2.3 删除边缘效应
只删除DoG响应值低的点往往是不够,一旦特征点落在图片边缘,这些点往往是不稳点的,且受噪声干扰变得不稳定。
在一个平坦的DoG响应峰值在横跨边缘有较大的主曲率,而垂直边缘方向有较小的主曲率。主曲率可通过2X2的Hessian矩阵求得:
H
(
x
,
y
)
=
[
D
x
x
(
x
,
y
)
D
x
y
(
x
,
y
)
D
x
y
(
x
,
y
)
D
y
y
(
x
,
y
)
]
H(x,y) = \begin{bmatrix}D_{xx}(x,y) & D_{xy}(x,y)\\ D_{xy}(x,y) &D_{yy}(x,y) \end{bmatrix}
H(x,y)=[Dxx(x,y)Dxy(x,y)Dxy(x,y)Dyy(x,y)]
其中,
D
x
x
,
D
x
y
,
D
y
y
D_{xx},D_{xy},D_{yy}
Dxx,Dxy,Dyy通过候选点进行差分得到的。
为了避免求具体特征值。我们先假设H的最大特征值为
α
\alpha
α,最小特征值为
β
\beta
β,则
T
r
(
H
)
=
D
x
x
+
D
y
y
=
α
+
β
Tr(H)=D_{xx}+D_{yy}=\alpha + \beta
Tr(H)=Dxx+Dyy=α+β
D
e
t
(
H
)
=
D
x
x
+
D
y
y
−
D
x
y
2
=
α
β
Det(H)=D_{xx}+D_{yy}-D^2_{xy}=\alpha\beta
Det(H)=Dxx+Dyy−Dxy2=αβ
其中,Tr(H)为矩阵H的迹,Det(H)为矩阵H的行列式。
设
γ
=
α
β
\gamma=\frac{\alpha}{\beta}
γ=βα来表示最大特征值和最小特征值的比值,则
T
r
(
H
)
2
D
e
t
(
H
)
=
(
α
+
β
)
2
α
β
=
(
γ
β
+
β
)
2
γ
β
2
=
(
γ
+
1
)
2
γ
\frac{Tr(H)^2}{Det(H)} = \frac{(\alpha +\beta)^2}{\alpha \beta} = \frac{(\gamma \beta + \beta)^2}{\gamma \beta ^2} = \frac{(\gamma +1)^2}{\gamma}
Det(H)Tr(H)2=αβ(α+β)2=γβ2(γβ+β)2=γ(γ+1)2
通过上面的式子,我们可以设置一个阈值
T
γ
T_{\gamma}
Tγ,来检测主曲率是否在某个阈值下。
T
r
(
H
)
2
D
e
t
(
H
)
<
(
γ
+
1
)
2
γ
\frac{Tr(H)^2}{Det(H)} < \frac{(\gamma+1)^2}{\gamma}
Det(H)Tr(H)2<γ(γ+1)2
上式成立,则保留特征点。(Lowe的论文给出
γ
=
10
\gamma=10
γ=10)
3.特征点方向
当我们确定特征点后,以特征点为中心,
3
×
1.5
σ
3\times 1.5\sigma
3×1.5σ为半径进行直方图统计。
计算半径内每个点(x,y)的梯度的幅值(也就是模)
m
(
x
,
y
)
m(x,y)
m(x,y),及方向
θ
(
x
,
y
)
θ(x,y)
θ(x,y),由以下两个公式决定
m
(
x
,
y
)
=
[
L
(
x
+
1
,
y
)
−
L
(
x
−
1
,
y
)
]
2
+
[
L
(
x
,
y
+
1
)
−
L
(
x
,
y
−
1
)
]
2
)
m(x,y)=\sqrt{[L(x+1,y)-L(x-1,y)]^2+[L(x,y+1)-L(x,y-1)]^2)}
m(x,y)=[L(x+1,y)−L(x−1,y)]2+[L(x,y+1)−L(x,y−1)]2)
θ
(
x
,
y
)
=
arctan
L
(
x
,
y
+
1
)
−
L
(
x
,
y
−
1
)
L
(
x
+
1
,
y
)
−
L
(
x
−
1
,
y
)
\theta(x,y) = \arctan{\frac{L(x,y+1) - L(x,y - 1)}{L(x + 1,y) - L(x-1,y)}}
θ(x,y)=arctanL(x+1,y)−L(x−1,y)L(x,y+1)−L(x,y−1)
计算完梯度方向后,使用直方图统计特征点邻域内像素对应的梯度幅值和方向。在直方图中,不是精确的方向,而是将360°分成10份,每个相邻方向相隔36°,通过上述计算方向来近似到某个我们划分方向。(有时候360°会分成8份,每个相邻方向相隔45°)。为了得到精确方向,采用插值拟合来使方向更加精确。由于本人后面的原理还没能够理解并实现代码,用了近似原则处理了一下。有大概的实验现象,后续会跟进。
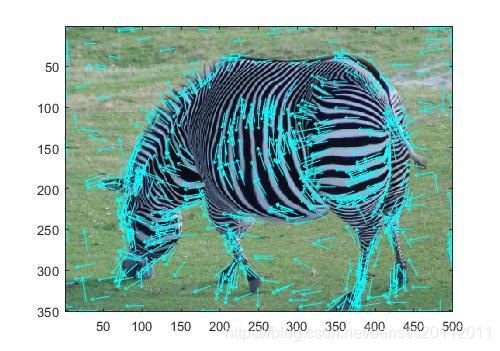
%sift文件
image = imread('animal.jpg');
image2 = image;
[Irows, Icols, channels] = size(image);
if(channels == 3)
image = rgb2gray(image);%变成灰度图像
end
I = double(image);
%Scale space peak selection
Sigma = 1.6;
k = 2^(1/3);
DOG_Times = 4;
Octaves = 3;
Octave_outputs = ScaleSpace(I, DOG_Times, Octaves, Sigma, k);
%Detection
counter = 1;
r_tr = 10;
OriBins = 36;
winfactor = 1.5;
for i = 1:Octaves
for j = 1:DOG_Times
if(j ~= DOG_Times && j ~= 1)
current = Octave_outputs(i).DOG{j}.DOG;
below = Octave_outputs(i).DOG{j-1}.DOG;
above = Octave_outputs(i).DOG{j+1}.DOG;
L = Octave_outputs(i).DOG{j}.L1;
S = Octave_outputs(i).DOG{j}.S;
[rows, cols] = size(Octave_outputs(i).DOG{j}.DOG);
for r = 1:rows
for c = 1:cols
%avoid edges
if(c ~= 1 && c ~= cols && r ~= 1 && r ~= rows)
X = [current(r,c) current(r + 1,c) current(r - 1,c) current(r,c + 1) current(r,c - 1) current(r + 1,c + 1) current(r - 1,c - 1) current(r + 1,c - 1) current(r - 1,c + 1) below(r,c) below(r + 1,c) below(r - 1,c) below(r,c + 1) below(r,c - 1) below(r + 1,c + 1) below(r - 1,c - 1) below(r + 1,c - 1) below(r - 1,c + 1) above(r + 1,c) above(r - 1,c) above(r,c + 1) above(r,c - 1) above(r + 1,c + 1) above(r - 1,c - 1) above(r + 1,c - 1) above(r - 1,c + 1)];
%peak detection
[max_X, index_X_max] = max(X);
[min_X, index_X_min] = min(X);
if(index_X_max == 1 || index_X_min == 1)
if(index_X_max == 1)
D = max_X;
else
D = min_X;
end
Dx = (current(r,c + 1) - current(r,c - 1))/2;
Dy = (current(r + 1,c) - current(r - 1,c))/2;
Ds = (above(r,c) - below(r,c))/2;
D_firstDerivation = [Dx; Dy; Ds];
Dxx = current(r, c - 1) - 2 * current(r, c) + current(r, c + 1);
Dyy = current(r - 1, c) - 2 * current(r, c) + current(r + 1, c);
Dss = below(r, c) - 2 * current(r, c) + above(r, c);
Dxy = ((current(r + 1, c + 1) - current(r + 1, c - 1)) - (current(r - 1, c + 1) - current(r - 1, c - 1))) / 4;
Dxs = ((above(r, c + 1) - above(r, c - 1)) - (below(r, c + 1) - below(r, c - 1))) / 4;
Dys = ((above(r + 1, c) - above(r - 1, c)) - (below(r + 1, c) - below(r - 1, c))) / 4;
D_secondDerivation = [Dxx Dxy Dxs;Dxy Dyy Dys;Dxs Dys Dss];
extremum_vector = -inv(D_secondDerivation) * D_firstDerivation; %extremun_vector (Δx,Δy,Δs) s: scale
x = c;
y = r;
s = j;
%使用阈值处理
if(extremum_vector(1) > 0.5 && ceil(c + extremum_vector(1)) < cols)
extremum_vector(1) = ceil( x + extremum_vector(1));
x = extremum_vector(1);
end
if(extremum_vector(2) > 0.5 && ceil(r + extremum_vector(2)) < rows)
extremum_vector(2) = ceil(y + extremum_vector(2));
y = extremum_vector(2);
end
if(extremum_vector(3) > 0.5 && ceil(j + extremum_vector(3)) <= DOG_Times)
extremum_vector(3) = ceil(s + extremum_vector(3));
s = extremum_vector(3);
L = Octave_outputs(i).DOG{s}.L1;
S = Octave_outputs(i).DOG{s}.S;
end
D_extremum = D + 0.5 * transp(D_firstDerivation) * extremum_vector;
%这里col为x,row为y
Dxx = current(y, x - 1) - 2 * current(y, x) + current(y, x + 1);
Dyy = current(y - 1, x) - 2 * current(y, x) + current(y + 1, x);
Dxy = ((current(y+1,x+1) - current(y+1,x-1)) - (current(y-1,x+1) - current(y-1,x-1))) / 4;
if(abs(D_extremum) >= (0.03 * 255))
H = [Dxx Dxy;Dxy Dyy];
if((trace(H).^2) / det(H) < ((r_tr + 1).^2) / r_tr)
sigma = winfactor * Sigma * (2.^(s/k));
radius = round(3 * sigma);
hist = zeros(1, OriBins);
%angle = atan((L(y, x + 1) - L(y, x - 1)) / L(y + 1,x) - L(y - 1, x));
%特征点检测
for new_r = y - radius : y + radius
for new_c = x - radius : x + radius
if(new_r > 1 && new_c > 1 && new_r < rows -2 && new_c < cols - 2)
m = sqrt(power(L(new_r + 1, new_c) - L(new_r - 1, new_c), 2) + power(L(new_r, new_c + 1) - L(new_r, new_c - 1), 2));
distance_2 = (y - new_r).^2 + (x - new_c).^2;
if( m > 0.0 && distance_2 < radius * radius + 0.5)
weight = exp(- distance_2 / (2.0 * sigma * sigma));
angle = atan((L(new_r, new_c + 1) - L(new_r, new_c - 1)) / (L(new_r + 1, new_c) - L(new_r - 1, new_c)));
bin = ceil(OriBins * (angle + pi + 0.001) / ( 2.0 * pi));
bin = min(bin, OriBins);
hist(bin) = hist(bin) + m * weight;
end
end
end
end
[~, index] = max(hist);
angle = 2 * pi * index / OriBins;
temp_Peaks(counter) = struct('r_peak',y, 'c_peak',x, 'i_octave',i, 'ori', angle, 'S',S);
counter = counter + 1;
end
end
end
end
end
end
end
end
end
%将特征向量整合
for i = 1:length(temp_Peaks)
c = temp_Peaks(i).c_peak * power(2, temp_Peaks(i).i_octave - 1);
r = temp_Peaks(i).r_peak * power(2,temp_Peaks(i).i_octave - 1);
locs(i,:) = [r c temp_Peaks(i).S temp_Peaks(i).ori];
end
image = image2;
computer_feature = counter - 1
showkeys(image, locs);
%金字塔构建
function Octave_outputs = ScaleSpace( I_input, DOG_Times, Octaves, Sigma,k)
%I_input: the orginal input Image
%DOG_Times: the number of times that Difference of Gaussian should be computed
%Octaves: How many octaves should be computed
%Sigma: is the sigma value for Gaussain filter
%k: is the scale value that will be multiplied by sigma to compute the Gaussian and find DOG
DOG = cell(1,DOG_Times);
counter = 0;
for j = 1:Octaves
%First Gaussian Filter
GaussainSize = ceil(7*(Sigma * (k^counter)));%一般高斯核的大小在6倍方差,这里可以改成6
H = fspecial('gaussian' , [GaussainSize,GaussainSize ], Sigma * (k^counter));%建立每组第一个高斯核
if(j > 1)
I_input = I_input(1:2:end,1:2:end);%缩小图片尺寸
end
for i = 1:DOG_Times
L1 = conv2(I_input, H, 'same');
GaussainSize = ceil(7*(Sigma*(k^(i+counter))));
H = fspecial('gaussian' , [GaussainSize,GaussainSize ], Sigma * (k^(i+counter)));
L2 = conv2(I_input, H, 'same');
%DOG and save it
Octave_outputs(j).DOG{i} = struct('DOG', L2 - L1, 'L2', L2, 'L1', L1, 'S', Sigma*(k^(i+counter)));
end
counter = counter + 1;
end
end
展示特征点,引用sift论文
% showkeys(image, locs)
%
% This function displays an image with SIFT keypoints overlayed.
% Input parameters:
% image: the file name for the image (grayscale)
% locs: matrix in which each row gives a keypoint location (row,
% column, scale, orientation)
function showkeys(image, locs)
disp('Drawing SIFT keypoints ...');
% Draw image with keypoints
figure('Position', [50 50 size(image,2) size(image,1)]);
colormap('gray');
imagesc(image);
hold on;
imsize = size(image);
for i = 1: size(locs,1)
% Draw an arrow, each line transformed according to keypoint parameters.
TransformLine(imsize, locs(i,:), 0.0, 0.0, 1.0, 0.0);
TransformLine(imsize, locs(i,:), 0.85, 0.1, 1.0, 0.0);
TransformLine(imsize, locs(i,:), 0.85, -0.1, 1.0, 0.0);
end
hold off;
% ------ Subroutine: TransformLine -------
% Draw the given line in the image, but first translate, rotate, and
% scale according to the keypoint parameters.
%
% Parameters:
% Arrays:
% imsize = [rows columns] of image
% keypoint = [subpixel_row subpixel_column scale orientation]
%
% Scalars:
% x1, y1; begining of vector
% x2, y2; ending of vector
function TransformLine(imsize, keypoint, x1, y1, x2, y2)
% The scaling of the unit length arrow is set to approximately the radius
% of the region used to compute the keypoint descriptor.
len = 6 * keypoint(3);
% Rotate the keypoints by 'ori' = keypoint(4)
s = sin(keypoint(4));
c = cos(keypoint(4));
% Apply transform
r1 = keypoint(1) - len * (c * y1 + s * x1);
c1 = keypoint(2) + len * (- s * y1 + c * x1);
r2 = keypoint(1) - len * (c * y2 + s * x2);
c2 = keypoint(2) + len * (- s * y2 + c * x2);
line([c1 c2], [r1 r2], 'Color', 'c');
参考链接
https://wenku.baidu.com/view/87270d2c2af90242a895e52e.html?re=view
https://www.cnblogs.com/ronny/p/4028776.html
https://www.cnblogs.com/wangguchangqing/p/4853263.html#autoid-4-2-0
https://blog.youkuaiyun.com/dcrmg/article/details/52561656
https://www.cnblogs.com/JiePro/p/sift_1.html
如有错误,请大家指出,谢谢。

















 1172
1172

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









