




 本文探讨了Sarsa算法在风力网格世界任务中的应用,通过增加行动选项(4个、8个及9个动作),以及引入风力的随机性,对比分析了不同设置下算法的表现。实验结果显示,随着行动选择的增加,算法的效率得到提升,尤其是在风力效果具有随机变化的情况下。
本文探讨了Sarsa算法在风力网格世界任务中的应用,通过增加行动选项(4个、8个及9个动作),以及引入风力的随机性,对比分析了不同设置下算法的表现。实验结果显示,随着行动选择的增加,算法的效率得到提升,尤其是在风力效果具有随机变化的情况下。
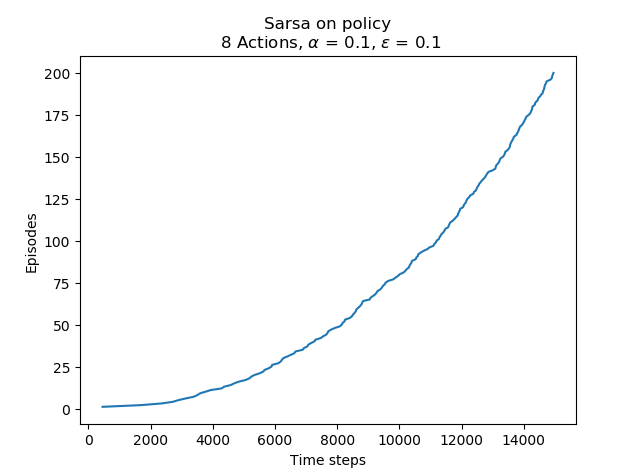
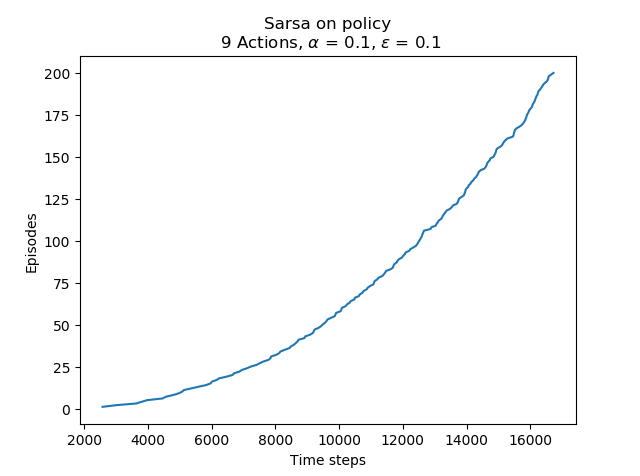
Exercise 6.9: Windy Gridworld with King’s Moves (programming) Re-solve the windy gridworld assuming eight possible actions, including the diagonal moves, rather than the usual four. How much better can you do with the extra actions? Can you do even better by including a ninth action that causes no movement at all other than that caused by the wind?
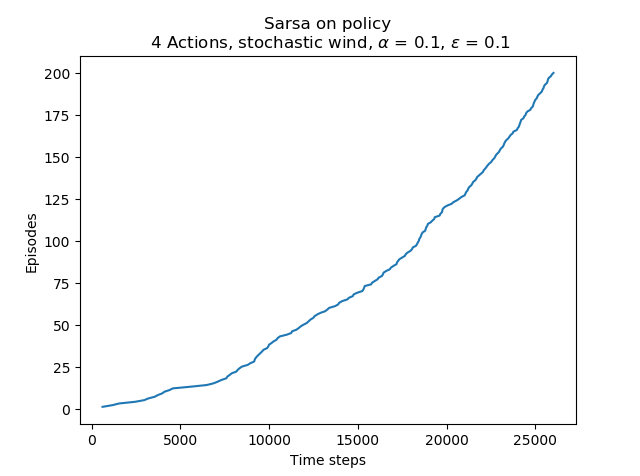
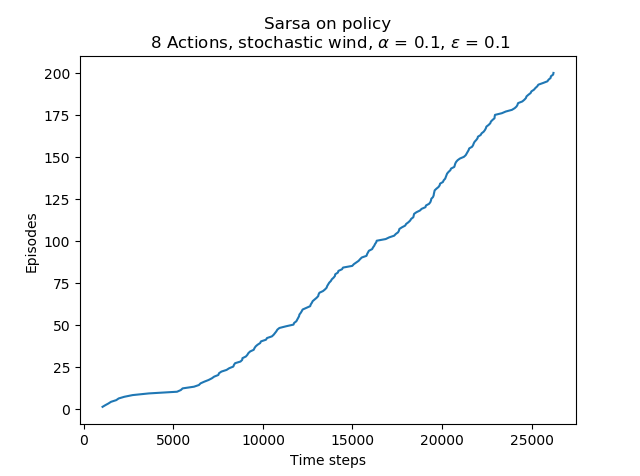
Exercise 6.10: Stochastic Wind (programming) Re-solve the windy gridworld task with King’s moves, assuming that the e↵ect of the wind, if there is any, is stochastic, sometimes varying by 1 from the mean values given for each column. That is, a third of the time you move exactly according to these values, as in the previous exercise, but also a third of the time you move one cell above that, and another third of the time you move one cell below that. For example, if you are one cell to the right of the goal and you move left, then one-third of the time you move one cell above the goal, one-third of the time you move two cells above the goal, and one-third of the time you move to the goal.
#==================================================================
# Python3
# Copyright
# 2019 Ye Xiang (xiang_ye@outlook.com)
#==================================================================
import numpy as np
import copy
import matplotlib.pyplot as mplt_pyplt
ACTION_LEFT = 0
ACTION_UP = 1
ACTION_RIGHT = 2
ACTION_DOWN = 3
ACTION_LEFTUP = 4
ACTION_RIGHTUP = 5
ACTION_RIGHTDOWN = 6
ACTION_LEFTDOWN = 7
ACTION_STAY = 8
ACTIONS_TYPE_4 = 0
ACTIONS_TYPE_8 = 1
ACTIONS_TYPE_9 = 2
class CState:
def __init__(self, x = 0, y = 0):
self.X = int(x)
self.Y = int(y)
def __eq__(self, rhs):
return self.X == rhs.X and self.Y == rhs.Y
def __ne__(self, rhs):
return self.X != rhs.X or self.Y != rhs.Y
class CWindy_gridworld:
def __init__(self):
self.__gridworld_width = 0
self.__gridworld_height = 0
self.__wind_strength = None
self.__Q = None
self.__actions = {}
self.__epsilon = 0
self.__alpha = 0
self.__gamma = 0
self.__state_start = CState(0, 3)
self.__state_goal = CState(7, 3)
self.__time_steps = 0
self.__records = []
self.__f_get_next_state = None
def __initialize(self, stochastic_wind, actions_type, epsilon, alpha, gamma = 1):
self.__gridworld_width = 10
self.__gridworld_height = 7
self.__wind_strength = np.zeros((self.__gridworld_width, self.__gridworld_height))
self.__wind_strength[3:6, :] = 1
self.__wind_strength[6:8, :] = 2
self.__wind_strength[8, :] = 1
self.__actions.clear()
if(actions_type == ACTIONS_TYPE_4):
self.__actions = { ACTION_LEFT:(-1, 0), ACTION_UP:(0, 1), ACTION_RIGHT:(1, 0), ACTION_DOWN:(0, -1)}
elif(actions_type == ACTIONS_TYPE_8):
self.__actions = {ACTION_LEFT:(-1, 0), ACTION_UP:(0, 1), ACTION_RIGHT:(1, 0), ACTION_DOWN:(0, -1),
ACTION_LEFTUP:(-1, 1), ACTION_RIGHTUP:(1, 1), ACTION_RIGHTDOWN:(1, -1), ACTION_LEFTDOWN:(-1, -1)}
elif(actions_type == ACTIONS_TYPE_9):
self.__actions = {ACTION_LEFT:(-1, 0), ACTION_UP:(0, 1), ACTION_RIGHT:(1, 0), ACTION_DOWN:(0, -1),
ACTION_STAY:(0 ,0), ACTION_LEFTUP:(-1, 1), ACTION_RIGHTUP:(1, 1), ACTION_RIGHTDOWN:(1, -1), ACTION_LEFTDOWN:(-1, -1)}
else:
raise TypeError('Invalid action type!')
self.__Q = np.zeros((self.__gridworld_width, self.__gridworld_height, len(self.__actions)))
self.__epsilon = epsilon
self.__alpha = alpha
self.__gamma = gamma
self.__time_steps = 0
self.__records = []
if stochastic_wind:
self.__f_get_next_state = self.__get_next_state_stochastic
else:
self.__f_get_next_state = self.__get_next_state
def __get_next_state(self, state, action):
temp = self.__actions[action]
X = state.X + temp[0]
Y = state.Y + temp[1] + self.__wind_strength[state.X][state.Y]
X = max(0, min(X, self.__gridworld_width - 1))
Y = max(0, min(Y, self.__gridworld_height - 1))
return CState(X, Y)
def __get_next_state_stochastic(self, state, action):
temp = self.__actions[action]
X = state.X + temp[0]
wind_strength = self.__wind_strength[state.X][state.Y]
Y = state.Y + temp[1] + wind_strength
if wind_strength != 0:
Y = Y + np.random.choice([-1, 0, 1])
X = max(0, min(X, self.__gridworld_width - 1))
Y = max(0, min(Y, self.__gridworld_height - 1))
return CState(X, Y)
def __get_action(self, state):
if np.random.choice([True, False], p = [1 - self.__epsilon, self.__epsilon]):
q_max = np.max(self.__Q[state.X][state.Y])
indices = [i for i, val in enumerate(self.__Q[state.X][state.Y]) if val == q_max]
return np.random.choice(indices)
else:
return np.random.choice(list(self.__actions.keys()))
def __run_in_episode(self):
state = copy.copy(self.__state_start)
action = self.__get_action(state)
while state != self.__state_goal:
next_state = self.__f_get_next_state(state, action)
next_action = self.__get_action(next_state)
reward = -1 if next_state != self.__state_goal else 0
Q_s_a = self.__Q[state.X][state.Y][action]
self.__Q[state.X][state.Y][action] = Q_s_a + self.__alpha * (reward + self.__gamma * self.__Q[next_state.X][next_state.Y][next_action] - Q_s_a)
state = next_state
action = next_action
self.__time_steps += 1
def Sarsa_on_policy(self, stochastic_wind = False, episodes = 200, actions_type = ACTIONS_TYPE_4, epsilon = 0.1, alpha = 0.1, gamma = 1):
self.__initialize(stochastic_wind, actions_type, epsilon, alpha, gamma)
for i in range(0, episodes):
self.__run_in_episode()
self.__records.append(self.__time_steps)
print('epsode: %d; progress: %.2f'%(i + 1, i / episodes * 100), end='\r')
print('episode: %d; progress: 100%%' % (episodes))
@property
def records(self):
return self.__records
class CPlot:
def plot(self, records, title = ''):
mplt_pyplt.plot(records, np.arange(1, len(records) + 1, 1))
mplt_pyplt.xlabel('Time steps')
mplt_pyplt.ylabel('Episodes')
mplt_pyplt.title(title)
mplt_pyplt.show()
if __name__ == "__main__":
wg = CWindy_gridworld()
plt = CPlot()
wg.Sarsa_on_policy()
plt.plot(wg.records, 'Sarsa on policy\n 4 Actions, ' + r'$\alpha$ = 0.1, $\epsilon$ = 0.1')
wg.Sarsa_on_policy(actions_type = ACTIONS_TYPE_8)
plt.plot(wg.records, 'Sarsa on policy\n 8 Actions, ' + r'$\alpha$ = 0.1, $\epsilon$ = 0.1')
wg.Sarsa_on_policy(actions_type = ACTIONS_TYPE_9)
plt.plot(wg.records, 'Sarsa on policy\n 9 Actions, ' + r'$\alpha$ = 0.1, $\epsilon$ = 0.1')
wg.Sarsa_on_policy(True)
plt.plot(wg.records, 'Sarsa on policy\n 4 Actions, stochastic wind, ' + r'$\alpha$ = 0.1, $\epsilon$ = 0.1')
wg.Sarsa_on_policy(True, actions_type = ACTIONS_TYPE_8)
plt.plot(wg.records, 'Sarsa on policy\n 8 Actions, stochastic wind, ' + r'$\alpha$ = 0.1, $\epsilon$ = 0.1')
wg.Sarsa_on_policy(True, actions_type = ACTIONS_TYPE_9)
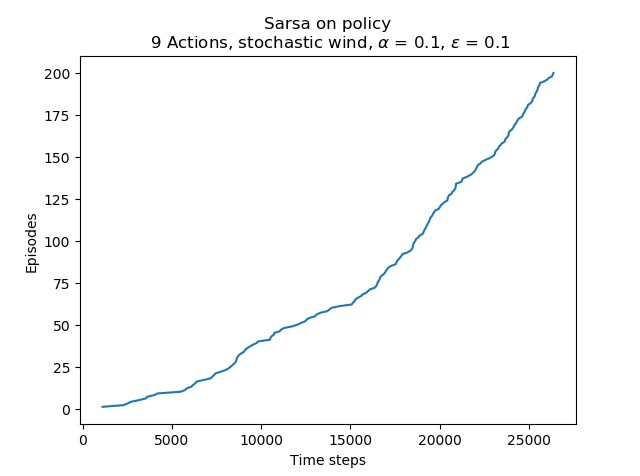
plt.plot(wg.records, 'Sarsa on policy\n 9 Actions, stochastic wind, ' + r'$\alpha$ = 0.1, $\epsilon$ = 0.1')
Both exercise 6.9 & 6.10 are implemented in the codes above. The results are shown as below:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









