




 使用opencv的camera_calibration.cpp计算11张14*14棋盘格图片的内参,得到dx=0.0012 mm/pixel,而实际计算4mm/100pixel得出0.04 mm/pixel,相差两位小数点。问题可能在于求得的内参矩阵中f/fx并非毫米像素比,提示内参矩阵存在错误,需要进一步排查。
使用opencv的camera_calibration.cpp计算11张14*14棋盘格图片的内参,得到dx=0.0012 mm/pixel,而实际计算4mm/100pixel得出0.04 mm/pixel,相差两位小数点。问题可能在于求得的内参矩阵中f/fx并非毫米像素比,提示内参矩阵存在错误,需要进一步排查。
使用自己拍摄的图片数据、opencv源码camera_calibration.cpp计算内参
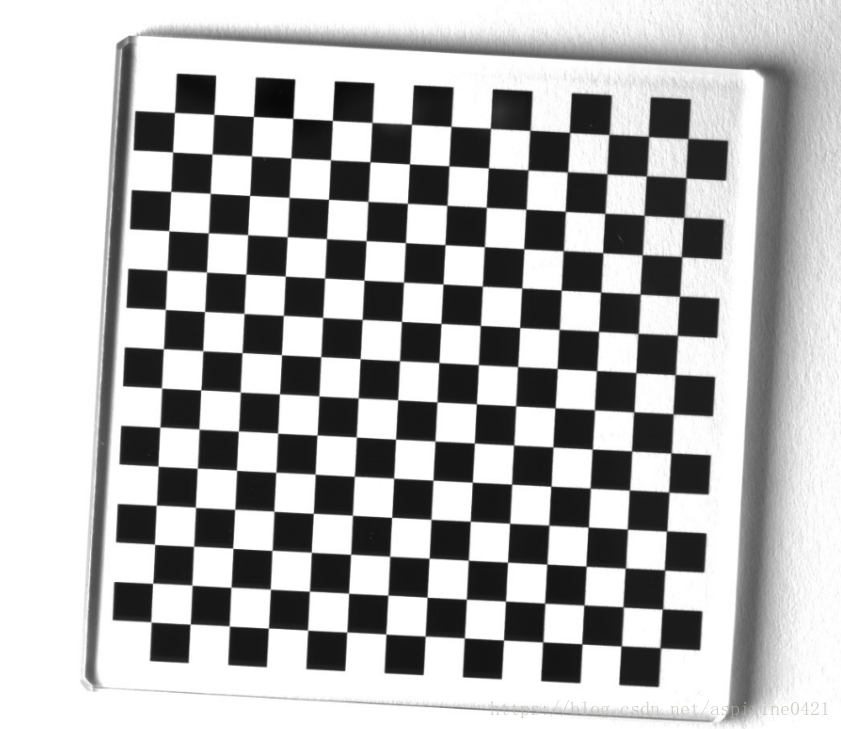
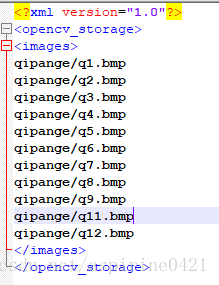
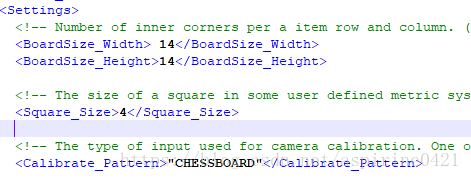
输入11张图,和棋盘参数,正方形标定板14*14个内角点,每个方格大小为4mm*4mm
结果如下:
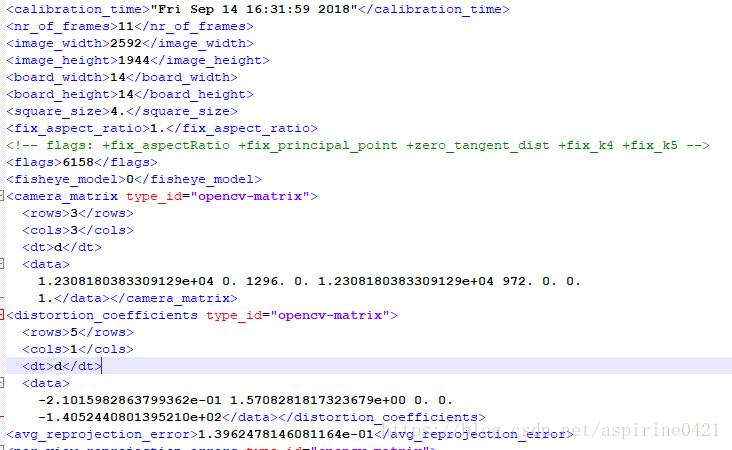
dx=f/fx=16/1.2308180383309129e+04=0.0012 mm/pixel;f的单位为mm fx的单位为pixel,dx单位为mm/pixel(单个像素有多大);
而实际计算时一个棋盘格在x方向差100像素,因此4mm/100pixel=0.04 mm/pixel;
差了两位小数点。
原来之前所求的内参矩阵,f/fx=归一化焦距,并不是毫米像素比,它是相机的参数,固定的,可以知道我们所求的矩阵有问题,下一步找到内参矩阵为何是有问题的。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 973
973

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









