







总结一些CNN里的经典网络架构:
一、批量归一化(batch normalization)
batch_norm是一种可以使较深的神经网络能容易训练的一种方法。一般放在仿射变换和激活函数之间。
𝜙(BN(𝑥))
他的实现代码如下:
import utils as d2l
from mxnet import autograd, gluon, init, nd
from mxnet.gluon import nn
def batch_norm(X, gamma, beta, moving_mean, moving_var, eps, momentum):
# 通过autograd来判断当前模式是训练模式还是预测模式
if not autograd.is_training():
# 如果是在预测模式下,直接使用传入的移动平均所得的均值和方差
X_hat = (X - moving_mean) / nd.sqrt(moving_var + eps)
else:
assert len(X.shape) in (2, 4)
if len(X.shape) == 2:
# 使用全连接层的情况,计算特征维上的均值和方差
mean = X.mean(axis=0)
var = ((X - mean) ** 2).mean(axis=0)
else:
# 使用二维卷积层的情况,计算通道维上(axis=1)的均值和方差。这里我们需要保持
# X的形状以便后面可以做广播运算
mean = X.mean(axis=(0, 2, 3), keepdims=True)
var = ((X - mean) ** 2).mean(axis=(0, 2, 3), keepdims=True)
# 训练模式下用当前的均值和方差做标准化
X_hat = (X - mean) / nd.sqrt(var + eps)
# 更新移动平均的均值和方差
moving_mean = momentum * moving_mean + (1.0 - momentum) * mean
moving_var = momentum * moving_var + (1.0 - momentum) * var
Y = gamma * X_hat + beta # 拉伸和偏移
return Y, moving_mean, moving_var然后,自定义一个batch_norm层:
class BatchNorm(nn.Block):
def __init__(self, num_features, num_dims, **kwargs):
super(BatchNorm, self).__init__(**kwargs)
if num_dims == 2:
shape = (1, num_features)
else:
shape = (1, num_features, 1, 1)
# 参与求梯度和迭代的拉伸和偏移参数,分别初始化成1和0
self.gamma = self.params.get('gamma', shape=shape, init=init.One())
self.beta = self.params.get('beta', shape=shape, init=init.Zero())
# 不参与求梯度和迭代的变量,全在内存上初始化成0
self.moving_mean = nd.zeros(shape)
self.moving_var = nd.zeros(shape)
def forward(self, X):
# 如果X不在内存上,将moving_mean和moving_var复制到X所在显存上
if self.moving_mean.context != X.context:
self.moving_mean = self.moving_mean.copyto(X.context)
self.moving_var = self.moving_var.copyto(X.context)
# 保存更新过的moving_mean和moving_var
Y, self.moving_mean, self.moving_var = batch_norm(
X, self.gamma.data(), self.beta.data(), self.moving_mean,
self.moving_var, eps=1e-5, momentum=0.9)
return Y然后,可以构建一个使用批量归一化的LeNet
net = nn.Sequential()
net.add(nn.Conv2D(6, kernel_size=5),
BatchNorm(6, num_dims=4),
nn.Activation('sigmoid'),
nn.MaxPool2D(pool_size=2, strides=2),
nn.Conv2D(16, kernel_size=5),
BatchNorm(16, num_dims=4),
nn.Activation('sigmoid'),
nn.MaxPool2D(pool_size=2, strides=2),
nn.Dense(120),
BatchNorm(120, num_dims=2),
nn.Activation('sigmoid'),
nn.Dense(84),
BatchNorm(84, num_dims=2),
nn.Activation('sigmoid'),
nn.Dense(10))
二、NIN
LeNet、AlexNet和VGG在设计上的共同之处是:先以由卷积层构成的模块充分抽取空间特征,再以由全连接层构成的模块来输出分类结果。其中,AlexNet和VGG对LeNet的改进主要在于如何对这两个模块加宽(增加通道数)和加深。
NIN的一个特点是使用1×1卷积层来替代全连接层,从而使空间信息能够自然传递到后面的层中去。
nin_block是一个基础块,它由一个卷积层加两个充当全连接层的1×11×1卷积层串联而成:
import utils as d2l
from mxnet import gluon, init, nd
from mxnet.gluon import nn
def nin_block(num_channels, kernel_size, strides, padding):
blk = nn.Sequential()
blk.add(nn.Conv2D(num_channels, kernel_size,
strides, padding, activation='relu'),
nn.Conv2D(num_channels, kernel_size=1, activation='relu'),
nn.Conv2D(num_channels, kernel_size=1, activation='relu'))
return blkNiN是在AlexNet问世不久后提出的。它们的卷积层设定有类似之处。NiN使用卷积窗口形状分别为11×1111×11、5×55×5和3×33×3的卷积层,相应的输出通道数也与AlexNet中的一致。每个NiN块后接一个步幅为2、窗口形状为3×33×3的最大池化层。
除使用NiN块以外,NiN还有一个设计与AlexNet显著不同:NiN去掉了AlexNet最后的3个全连接层,取而代之地,NiN使用了输出通道数等于标签类别数的NiN块,然后使用全局平均池化层对每个通道中所有元素求平均并直接用于分类。这里的全局平均池化层即窗口形状等于输入空间维形状的平均池化层。NiN的这个设计的好处是可以显著减小模型参数尺寸,从而缓解过拟合。然而,该设计有时会造成获得有效模型的训练时间的增加。
net = nn.Sequential()
net.add(nin_block(96, kernel_size=11, strides=4, padding=0),
nn.MaxPool2D(pool_size=3, strides=2),
nin_block(256, kernel_size=5, strides=1, padding=2),
nn.MaxPool2D(pool_size=3, strides=2),
nin_block(384, kernel_size=3, strides=1, padding=1),
nn.MaxPool2D(pool_size=3, strides=2), nn.Dropout(0.5),
# 标签类别数是10
nin_block(10, kernel_size=3, strides=1, padding=1),
# 全局平均池化层将窗口形状自动设置成输入的高和宽
nn.GlobalAvgPool2D(),
# 将四维的输出转成二维的输出,其形状为(批量大小, 10)
nn.Flatten())
三、GoogleNet
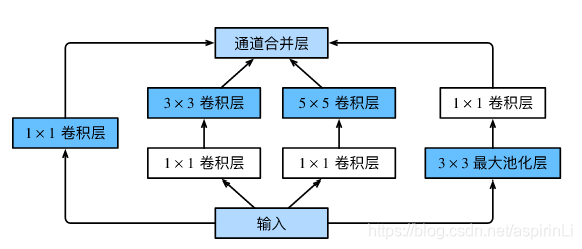
GoogLeNet中的基础卷积块叫作Inception块。Inception块里有4条并行的线路。前3条线路使用窗口大小分别1×1、3×3和5×5的卷积层来抽取不同空间尺寸下的信息,其中中间2个线路会对输入先做1×1卷积来减少输入通道数,以降低模型复杂度。第四条线路则使用3×3最大池化层,后接1×1卷积层来改变通道数。4条线路都使用了合适的填充来使输入与输出的高和宽一致。最后我们将每条线路的输出在通道维上连结,并输入接下来的层中去。Inception块中可以自定义的超参数是每个层的输出通道数,我们以此来控制模型复杂度。
import utils as d2l
from mxnet import gluon, init, nd
from mxnet.gluon import nn
class Inception(nn.Block):
# c1 - c4为每条线路里的层的输出通道数
def __init__(self, c1, c2, c3, c4, **kwargs):
super(Inception, self).__init__(**kwargs)
# 线路1,单1 x 1卷积层
self.p1_1 = nn.Conv2D(c1, kernel_size=1, activation='relu')
# 线路2,1 x 1卷积层后接3 x 3卷积层
self.p2_1 = nn.Conv2D(c2[0], kernel_size=1, activation='relu')
self.p2_2 = nn.Conv2D(c2[1], kernel_size=3, padding=1,
activation='relu')
# 线路3,1 x 1卷积层后接5 x 5卷积层
self.p3_1 = nn.Conv2D(c3[0], kernel_size=1, activation='relu')
self.p3_2 = nn.Conv2D(c3[1], kernel_size=5, padding=2,
activation='relu')
# 线路4,3 x 3最大池化层后接1 x 1卷积层
self.p4_1 = nn.MaxPool2D(pool_size=3, strides=1, padding=1)
self.p4_2 = nn.Conv2D(c4, kernel_size=1, activation='relu')
def forward(self, x):
p1 = self.p1_1(x)
p2 = self.p2_2(self.p2_1(x))
p3 = self.p3_2(self.p3_1(x))
p4 = self.p4_2(self.p4_1(x))
return nd.concat(p1, p2, p3, p4, dim=1) # 在通道维上连结输出GoogleNet由五个模块构成,如下:
#第一模块使用一个64通道的 7×7 卷积层。
b1 = nn.Sequential()
b1.add(nn.Conv2D(64, kernel_size=7, strides=2, padding=3, activation='relu'),
nn.MaxPool2D(pool_size=3, strides=2, padding=1))
#第二模块使用2个卷积层:首先是64通道的 1×1 卷积层,然后是将通道增大3倍的 3×3 卷积层。它对应Inception块中的第二条线路。
b2 = nn.Sequential()
b2.add(nn.Conv2D(64, kernel_size=1, activation='relu'),
nn.Conv2D(192, kernel_size=3, padding=1, activation='relu'),
nn.MaxPool2D(pool_size=3, strides=2, padding=1))
#第三模块串联2个完整的Inception块。第一个Inception块的输出通道数为 64+128+32+32=256 ,其中4条线路的输出通道数比例为 64:128:32:32=2:4:1:1 。其中第二、第三条线路先分别将输入通道数减小至 96/192=1/2 和 16/192=1/12 后,再接上第二层卷积层。第二个Inception块输出通道数增至 128+192+96+64=480 ,每条线路的输出通道数之比为 128:192:96:64=4:6:3:2 。其中第二、第三条线路先分别将输入通道数减小至 128/256=1/2 和 32/256=1/8 。
b3 = nn.Sequential()
b3.add(Inception(64, (96, 128), (16, 32), 32),
Inception(128, (128, 192), (32, 96), 64),
nn.MaxPool2D(pool_size=3, strides=2, padding=1))
#第四模块更加复杂。它串联了5个Inception块,其输出通道数分别是 192+208+48+64=512 、 160+224+64+64=512 、 128+256+64+64=512 、 112+288+64+64=528 和 256+320+128+128=832 。这些线路的通道数分配和第三模块中的类似,首先是含 3×3 卷积层的第二条线路输出最多通道,其次是仅含 1×1 卷积层的第一条线路,之后是含 5×5 卷积层的第三条线路和含 3×3 最大池化层的第四条线路。其中第二、第三条线路都会先按比例减小通道数。这些比例在各个Inception块中都略有不同。
b4 = nn.Sequential()
b4.add(Inception(192, (96, 208), (16, 48), 64),
Inception(160, (112, 224), (24, 64), 64),
Inception(128, (128, 256), (24, 64), 64),
Inception(112, (144, 288), (32, 64), 64),
Inception(256, (160, 320), (32, 128), 128),
nn.MaxPool2D(pool_size=3, strides=2, padding=1))
#第五模块有输出通道数为 256+320+128+128=832 和 384+384+128+128=1024 的两个Inception块。其中每条线路的通道数的分配思路和第三、第四模块中的一致,只是在具体数值上有所不同。需要注意的是,第五模块的后面紧跟输出层,该模块同NiN一样使用全局平均池化层来将每个通道的高和宽变成1。最后我们将输出变成二维数组后接上一个输出个数为标签类别数的全连接层。
b5 = nn.Sequential()
b5.add(Inception(256, (160, 320), (32, 128), 128),
Inception(384, (192, 384), (48, 128), 128),
nn.GlobalAvgPool2D())
net = nn.Sequential()
net.add(b1, b2, b3, b4, b5, nn.Dense(10))
四、ResNet
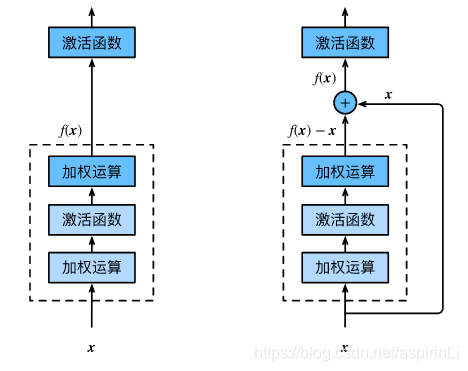
ResNet沿用了VGG全3×3卷积层的设计。残差块里首先有2个有相同输出通道数的3×3卷积层。每个卷积层后接一个批量归一化层和ReLU激活函数。然后我们将输入跳过这2个卷积运算后直接加在最后的ReLU激活函数前。这样的设计要求2个卷积层的输出与输入形状一样,从而可以相加。如果想改变通道数,就需要引入一个额外的1×1卷积层来将输入变换成需要的形状后再做相加运算。
import d2lzh as d2l
from mxnet import gluon, init, nd
from mxnet.gluon import nn
class Residual(nn.Block):
def __init__(self, num_channels, use_1x1conv=False, strides=1, **kwargs):
super(Residual, self).__init__(**kwargs)
self.conv1 = nn.Conv2D(num_channels, kernel_size=3, padding=1,
strides=strides)
self.conv2 = nn.Conv2D(num_channels, kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2D(num_channels, kernel_size=1,
strides=strides)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm()
self.bn2 = nn.BatchNorm()
def forward(self, X):
Y = nd.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
return nd.relu(Y + X)ResNet模型如下:
#ResNet的前两层跟之前介绍的GoogLeNet中的一样:在输出通道数为64、步幅为2的 7×7 卷积层后接步幅为2的 3×3 的最大池化层。不同之处在于ResNet每个卷积层后增加的批量归一化层。
net = nn.Sequential()
net.add(nn.Conv2D(64, kernel_size=7, strides=2, padding=3),
nn.BatchNorm(), nn.Activation('relu'),
nn.MaxPool2D(pool_size=3, strides=2, padding=1))
#GoogLeNet在后面接了4个由Inception块组成的模块。ResNet则使用4个由残差块组成的模块,每个模块使用若干个同样输出通道数的残差块。第一个模块的通道数同输入通道数一致。由于之前已经使用了步幅为2的最大池化层,所以无须减小高和宽。之后的每个模块在第一个残差块里将上一个模块的通道数翻倍,并将高和宽减半。
def resnet_block(num_channels, num_residuals, first_block=False):
blk = nn.Sequential()
for i in range(num_residuals):
if i == 0 and not first_block:
blk.add(Residual(num_channels, use_1x1conv=True, strides=2))
else:
blk.add(Residual(num_channels))
return blk
net.add(resnet_block(64, 2, first_block=True),
resnet_block(128, 2),
resnet_block(256, 2),
resnet_block(512, 2))
#最后,与GoogLeNet一样,加入全局平均池化层后接上全连接层输出。
net.add(nn.GlobalAvgPool2D(), nn.Dense(10))
五、DesNet
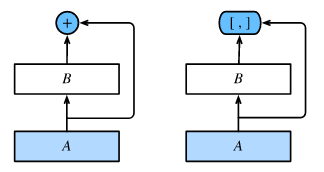
Resnet和DesNet最大的区别在于他们的连接方式,前者是用+连接,后者是用concat方式连接。
DenseNet的主要构建模块是稠密块(dense block)和过渡层(transition layer)。前者定义了输入和输出是如何连结的,后者则用来控制通道数,使之不过大。
DenseNet使用了ResNet改良版的“批量归一化、激活和卷积”结构。他是先做了batch_norm和relu再进行卷积:
def conv_block(num_channels):
blk = nn.Sequential()
blk.add(nn.BatchNorm(), nn.Activation('relu'),
nn.Conv2D(num_channels, kernel_size=3, padding=1))
return blk稠密块由多个conv_block组成,每块使用相同的输出通道数。但在前向计算时,我们将每块的输入和输出在通道维上连结。
class DenseBlock(nn.Block):
def __init__(self, num_convs, num_channels, **kwargs):
super(DenseBlock, self).__init__(**kwargs)
self.net = nn.Sequential()
for _ in range(num_convs):
self.net.add(conv_block(num_channels))
def forward(self, X):
for blk in self.net:
Y = blk(X)
X = nd.concat(X, Y, dim=1) # 在通道维上将输入和输出连结
return X由于每个稠密块都会带来通道数的增加,使用过多则会带来过于复杂的模型。过渡层用来控制模型复杂度。它通过1×1卷积层来减小通道数,并使用步幅为2的平均池化层减半高和宽,从而进一步降低模型复杂度。
def transition_block(num_channels):
blk = nn.Sequential()
blk.add(nn.BatchNorm(), nn.Activation('relu'),
nn.Conv2D(num_channels, kernel_size=1),
nn.AvgPool2D(pool_size=2, strides=2))
return blk下面是DesNet的网络架构:
#DenseNet首先使用同ResNet一样的单卷积层和最大池化层。
net = nn.Sequential()
net.add(nn.Conv2D(64, kernel_size=7, strides=2, padding=3),
nn.BatchNorm(), nn.Activation('relu'),
nn.MaxPool2D(pool_size=3, strides=2, padding=1))
#类似于ResNet接下来使用的4个残差块,DenseNet使用的是4个稠密块。同ResNet一样,我们可以设置每个稠密块使用多少个卷积层。这里我们设成4,从而与上一节的ResNet-18保持一致。稠密块里的卷积层通道数(即增长率)设为32,所以每个稠密块将增加128个通道。
#ResNet里通过步幅为2的残差块在每个模块之间减小高和宽。这里我们则使用过渡层来减半高和宽,并减半通道数。
num_channels, growth_rate = 64, 32 # num_channels为当前的通道数
num_convs_in_dense_blocks = [4, 4, 4, 4]
for i, num_convs in enumerate(num_convs_in_dense_blocks):
net.add(DenseBlock(num_convs, growth_rate))
# 上一个稠密块的输出通道数
num_channels += num_convs * growth_rate
# 在稠密块之间加入通道数减半的过渡层
if i != len(num_convs_in_dense_blocks) - 1:
num_channels //= 2
net.add(transition_block(num_channels))
#同ResNet一样,最后接上全局池化层和全连接层来输出。
net.add(nn.BatchNorm(), nn.Activation('relu'), nn.GlobalAvgPool2D(),
nn.Dense(10))

















 1050
1050

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









